










RA4L1开发TOF VL53L8CX.1--驱动TOF进行区域检测
- 概述
- 视频教学
- 样品申请
- 硬件准备
- 参考程序
- 源码下载
- 主要特点
- 技术规格
- 系统框图
- 应用示意图
- 区域映射
- 新建工程
- 工程模板
- 保存工程路径
- 芯片配置
- 工程模板选择
- 时钟设置
- UART配置
- UART属性配置
- 设置e2studio堆栈
- e2studio的重定向printf设置
- R_SCI_UART_Open()函数原型
- 回调函数user_uart_callback ()
- printf输出重定向到串口
- IIC属性配置
- IIC配置
- R_IIC_MASTER_Open()函数原型
- R_IIC_MASTER_Write()函数原型
- R_IIC_MASTER_Read()函数原型
- sci_i2c_master_callback()回调函数
- LPn
- 参考程序
- STSW-IMG040
- LPn设置
- 头文件
- 堆栈设置
- 获取版本信息
- 设备存在性检测
- 测距流程
- 初始化设备
- 启动测距
- 获取测距数据
- 主程序
- 状态定义
- 演示结果
概述
本文详细介绍了如何使用瑞萨(Renesas)RA4L1微控制器开发TOF VL53L8CX飞行时间(Time-of-Flight, TOF)多区测距传感器。首先对VL53L8CX的关键特性与应用场景做了简要说明,随后具体阐述了RA4L1 MCU平台下I²C通信接口的配置、传感器初始化流程、固件加载方式以及测距数据的获取方法。文中给出了基于瑞萨FSP库的代码示例,涵盖了数据的分块传输、轮询读取、错误处理等实际开发中经常遇到的技术细节与优化策略。通过本文,开发者可以迅速掌握VL53L8CX传感器与RA4L1平台的结合使用方法,并快速实现相关的工业自动化、智能家居、消费电子及机器人避障等多种应用。
最近在瑞萨RA的课程,需要样片的可以加qun申请:925643491。
视频教学
https://www.bilibili.com/video/BV1FLEgzZEfG/
RA4L1开发TOF VL53L8CX(1)----驱动TOF进行区域检测
样品申请
https://www.wjx.top/vm/rCrkUrz.aspx
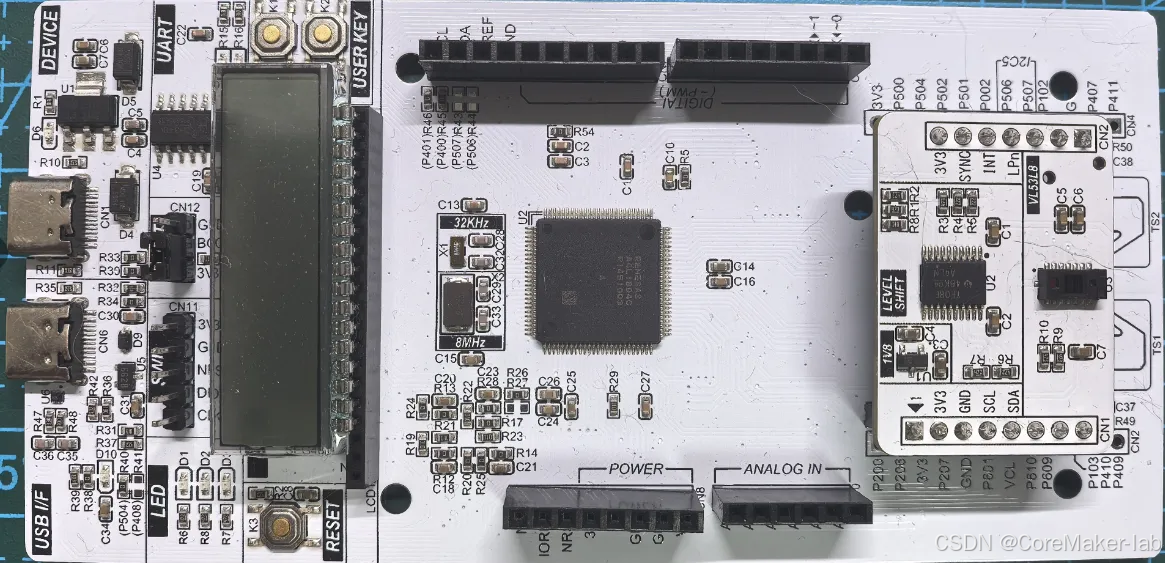
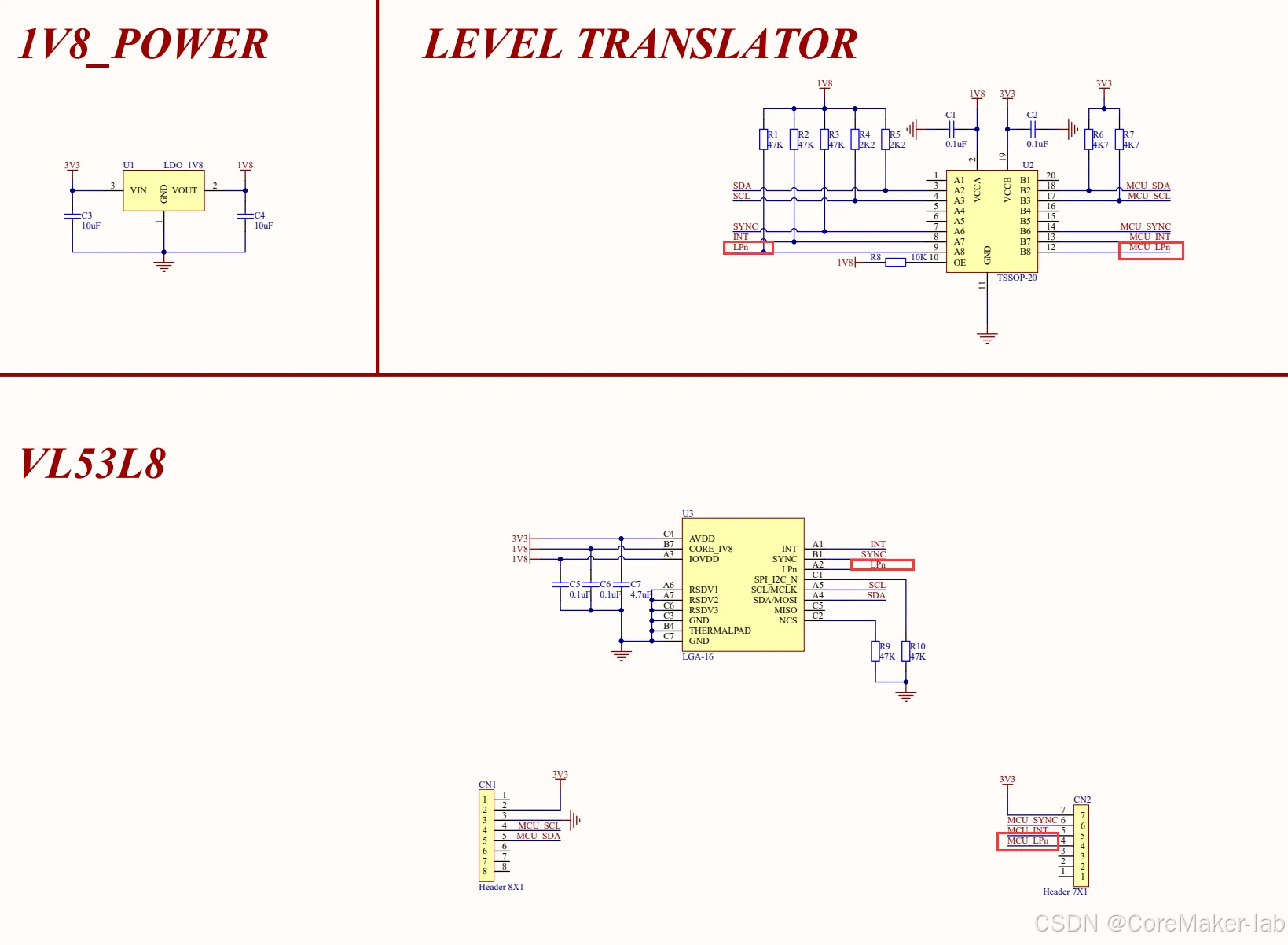
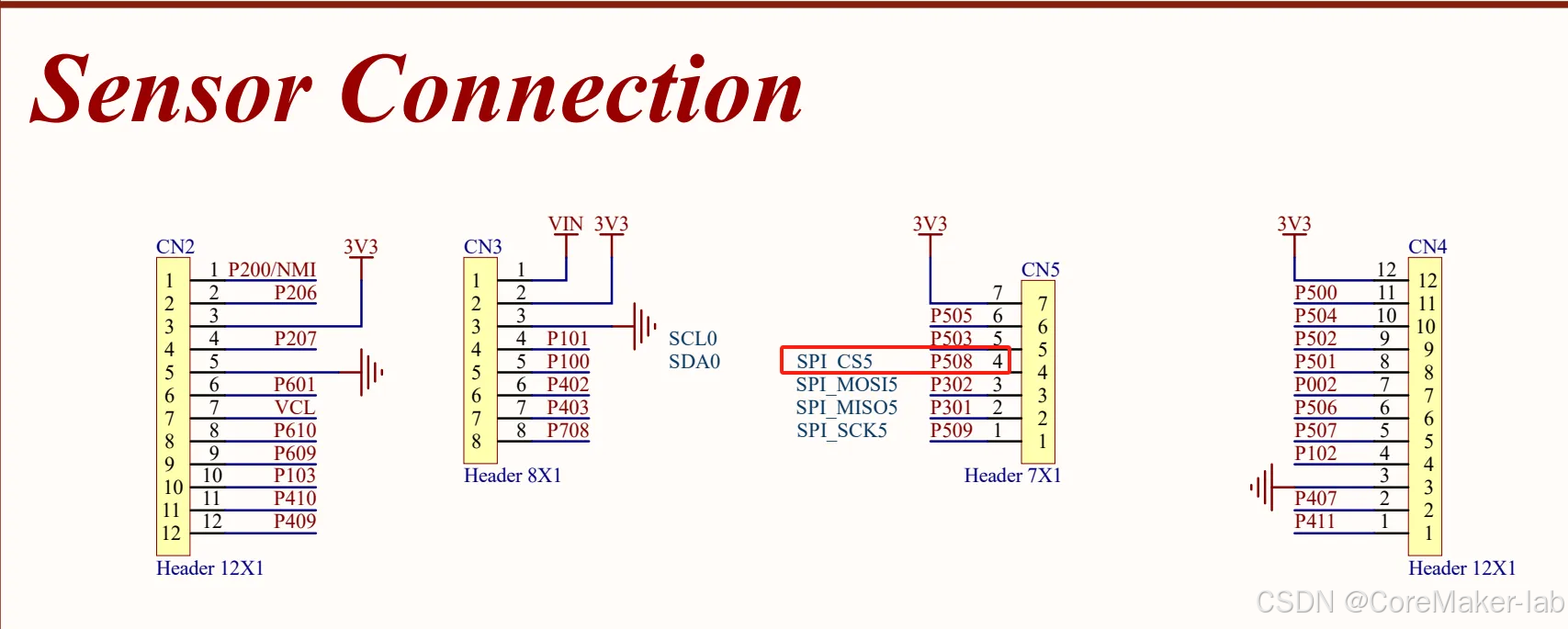
硬件准备
首先需要准备一个开发板,这里我准备的是自己绘制的开发板,需要的可以进行申请。
主控为R7FA4L1BD4CFP,TOF为VL53L8
参考程序
https://github.com/CoreMaker-lab/RA4L1_VL53L8CX
https://gitee.com/CoreMaker/RA4L1_VL53L8CX
源码下载
主要特点
新一代多区域飞行时间 (ToF) 传感器的功耗较低,提高了距离测距性能
● 可以使用4x4或8x8独立区域测量功能进行多区域距离测量
● 自主低功耗模式,通过可编程中断阈值唤醒主机
● 增强了环境光条件下的性能,测量距离可达400 cm
● 在每个区域均可进行多目标检测和测距
● 直方图处理和算法补偿可最大程度减少甚至消除盖片串扰的影响
● 每个区域都配有运动指示器,用于显示目标是否以及如何移动
● 60 Hz帧速率能力
完全集成的微型模块,具有宽视野 (FoV)
● 新一代大功率发射器:940 nm不可见光VCSEL(垂直腔面发射激光器)集成式模拟驱动器
● 65°对角线方形视场,发射器和接收器采用衍射光学元件 (DOE)
● 单光子雪崩二极管 (SPAD) 接收阵列
● 运行固件的低功耗微控制器
● 尺寸:6.4 x 3.0 x 1.75 mm
可轻松集成
● 单回流焊元件
● 需要1.8 V核心电源和3.3 V AVDD电源
● 可选1.2 V或1.8 V IOVDD接口电压等级
● I²C(可达1 MHz)或SPI(可达3 MHz)接口
● 兼容多种盖片材料
● 可隐藏在深色盖片之后

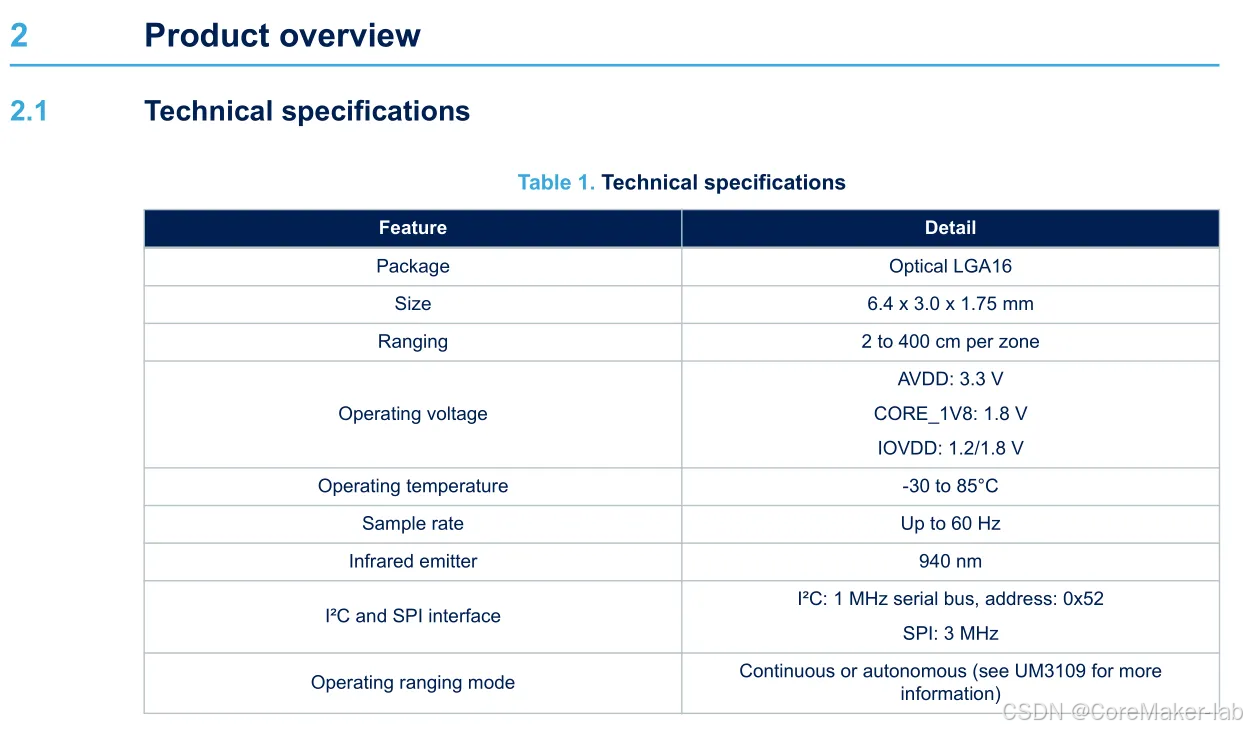
技术规格
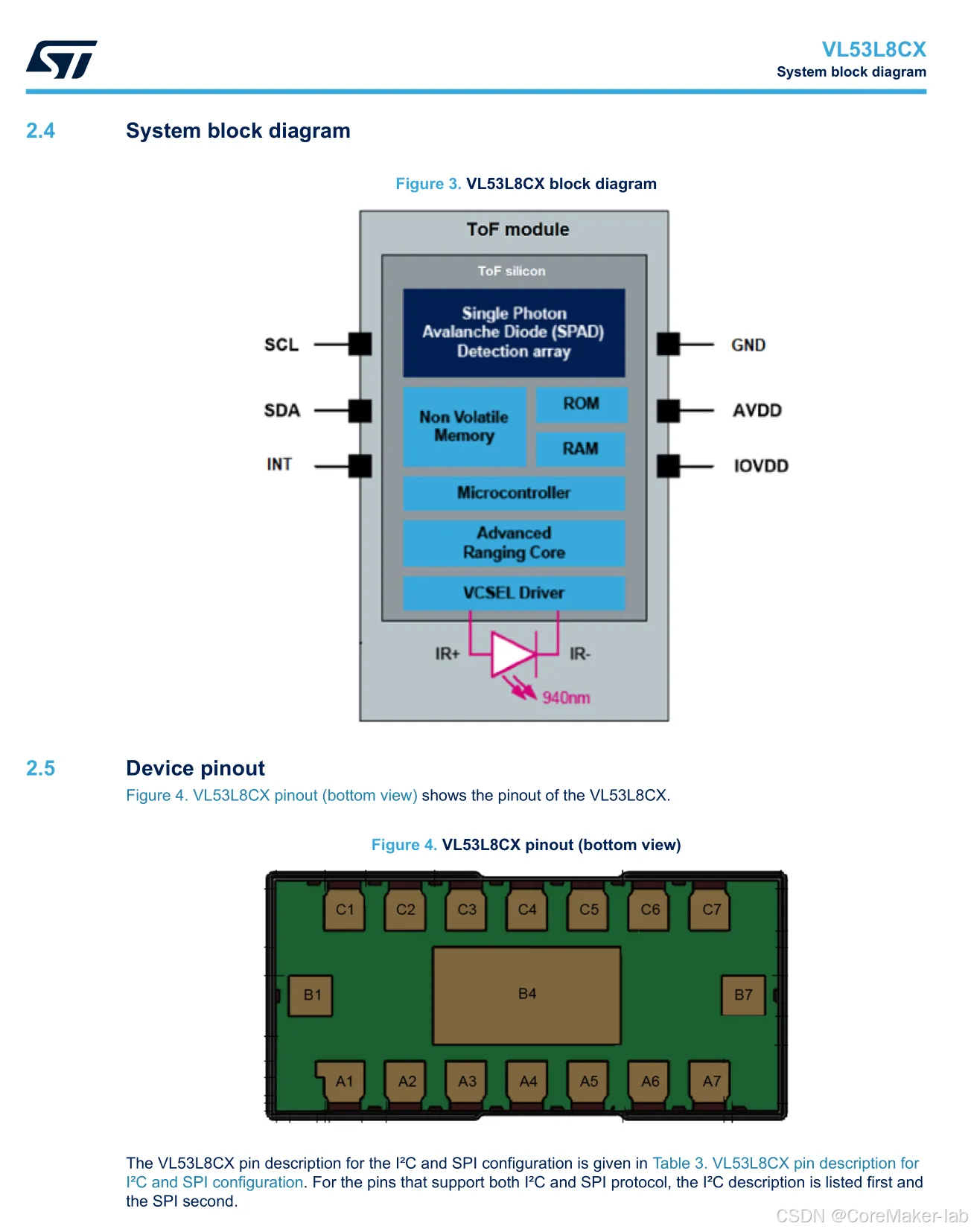
系统框图
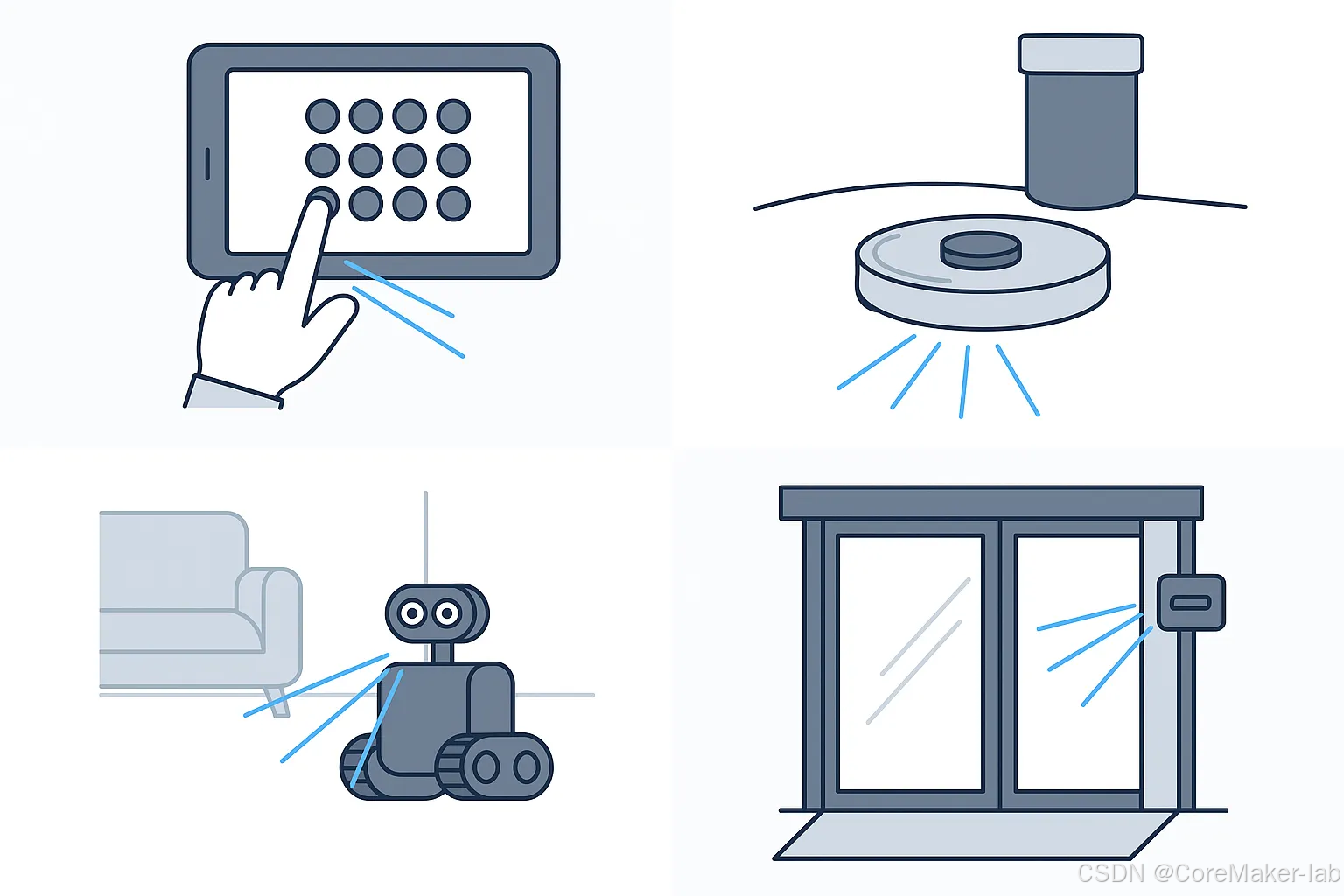
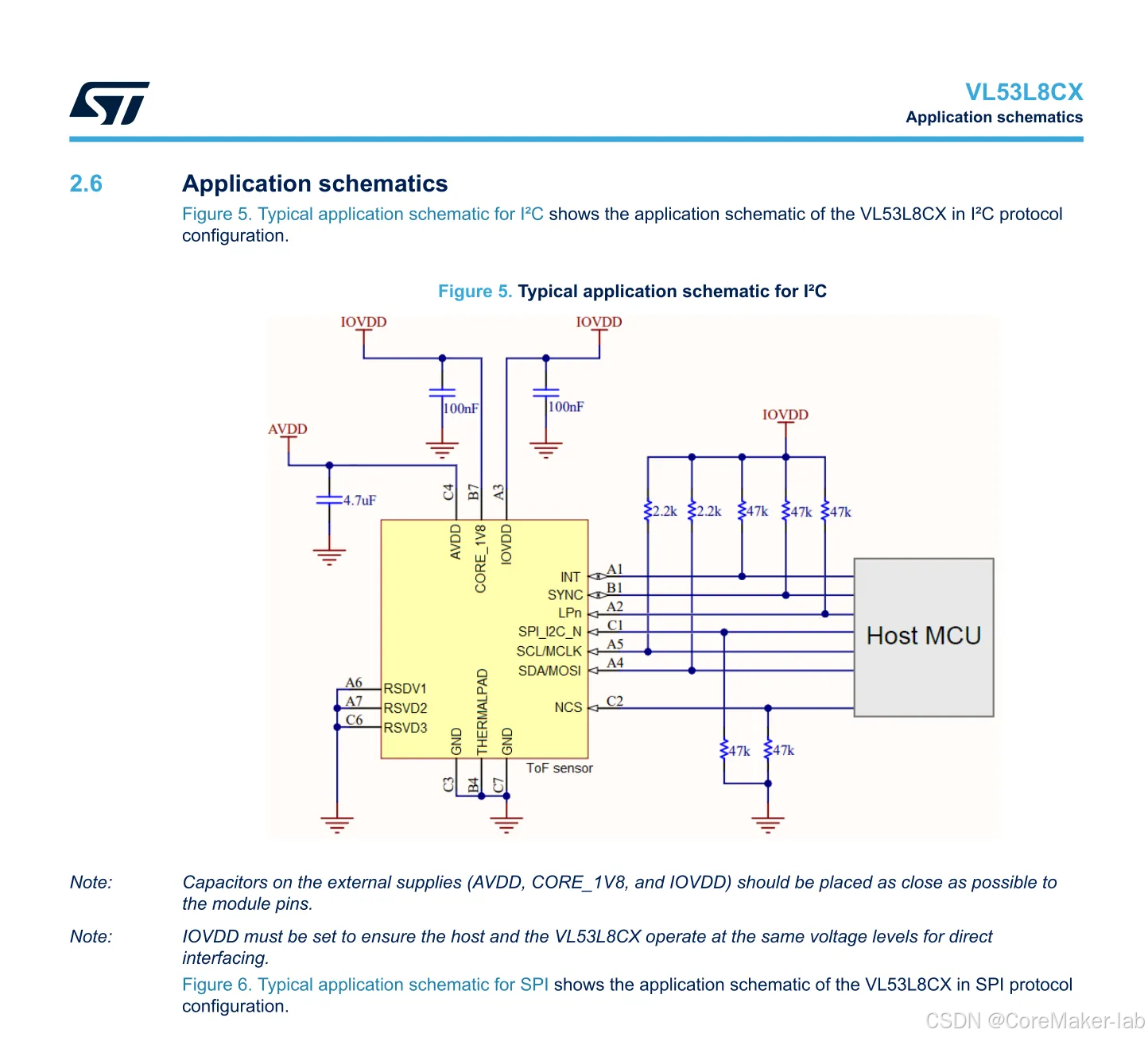
应用示意图
IIC模式下应用示意图。
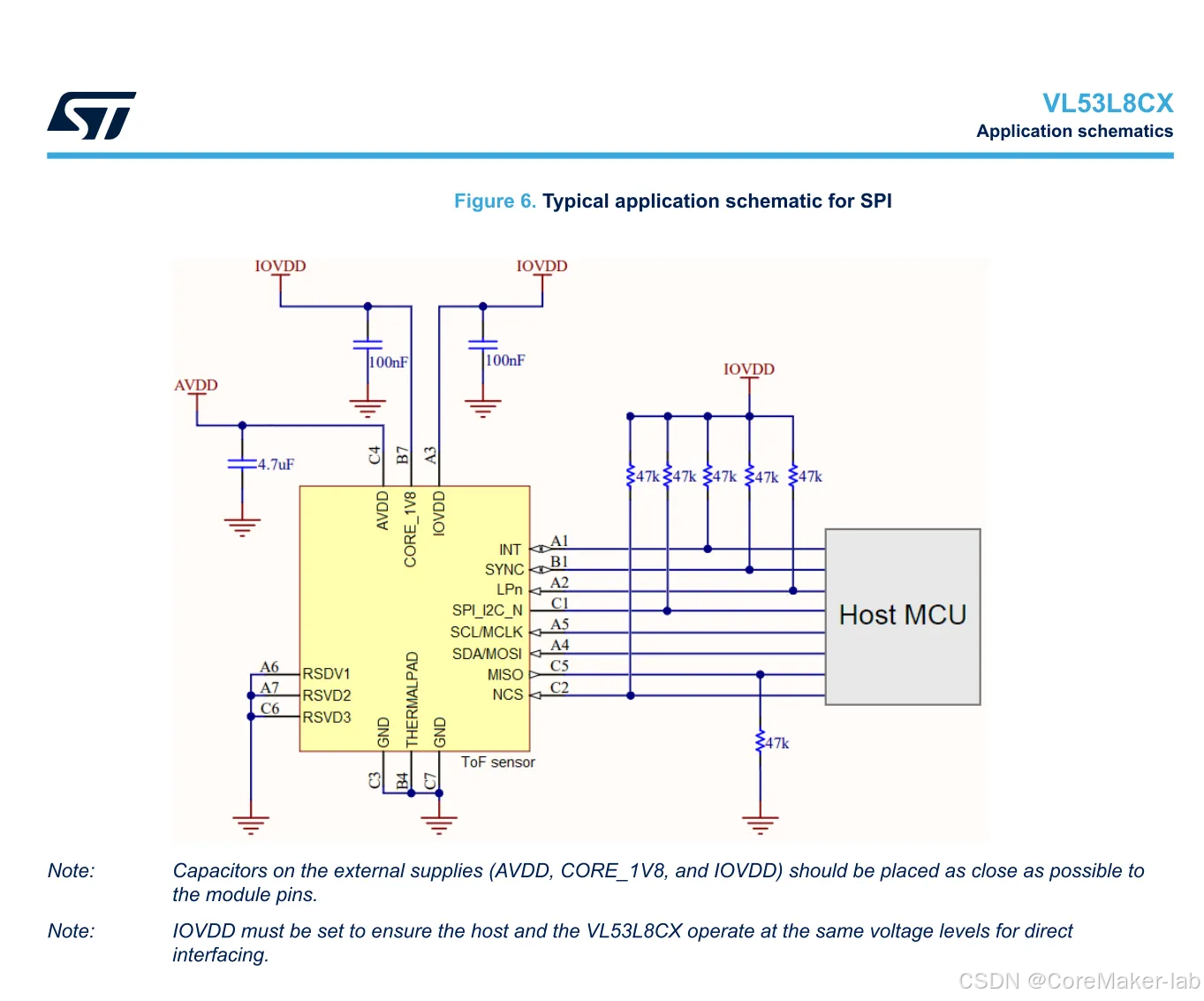
SPI模式下应用示意图。
区域映射
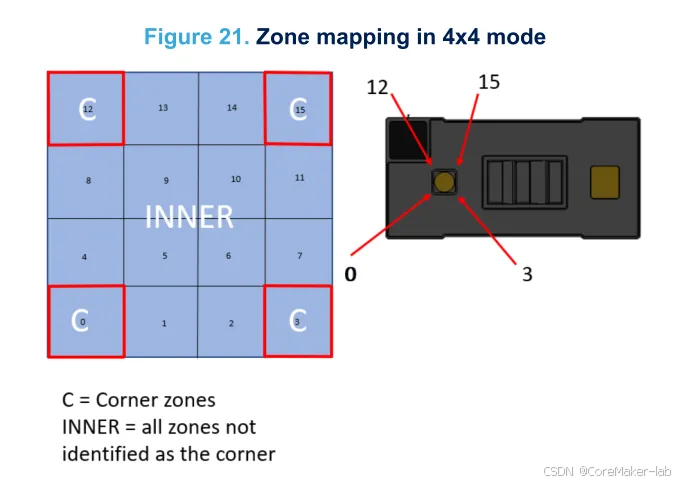
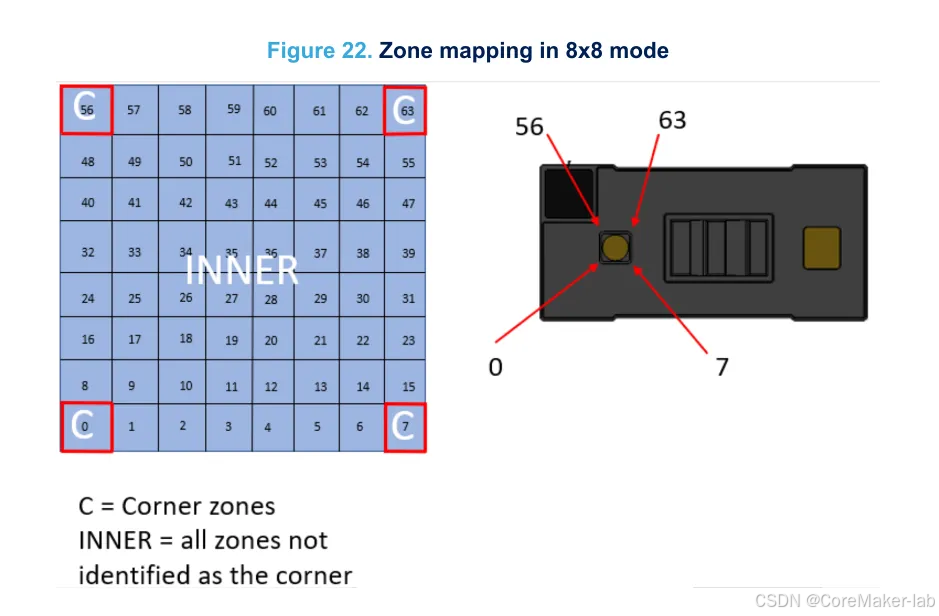
VL53L8CX支持4x4模式的区域映射和8x8模式的区域映射。
下图显示了4x4模式下的区域定义。总共有16个区域,它们沿着一行递增,然后再开始新的一行。物理视图是从设备顶部朝向镜头。如下图所示,每个区域的编号对应于传感器返回的ZoneIDs。
下图显示了8x8模式下的区域定义。总共有64个区域,它们沿着一行递增,然后再开始新的一行。物理视图是从设备顶部朝向镜头。如下图所示,每个区域的编号对应于传感器返回给主机的ZoneIDs。
新建工程

工程模板

保存工程路径

芯片配置
本文中使用R7FA4L1BD4CFP来进行演示。
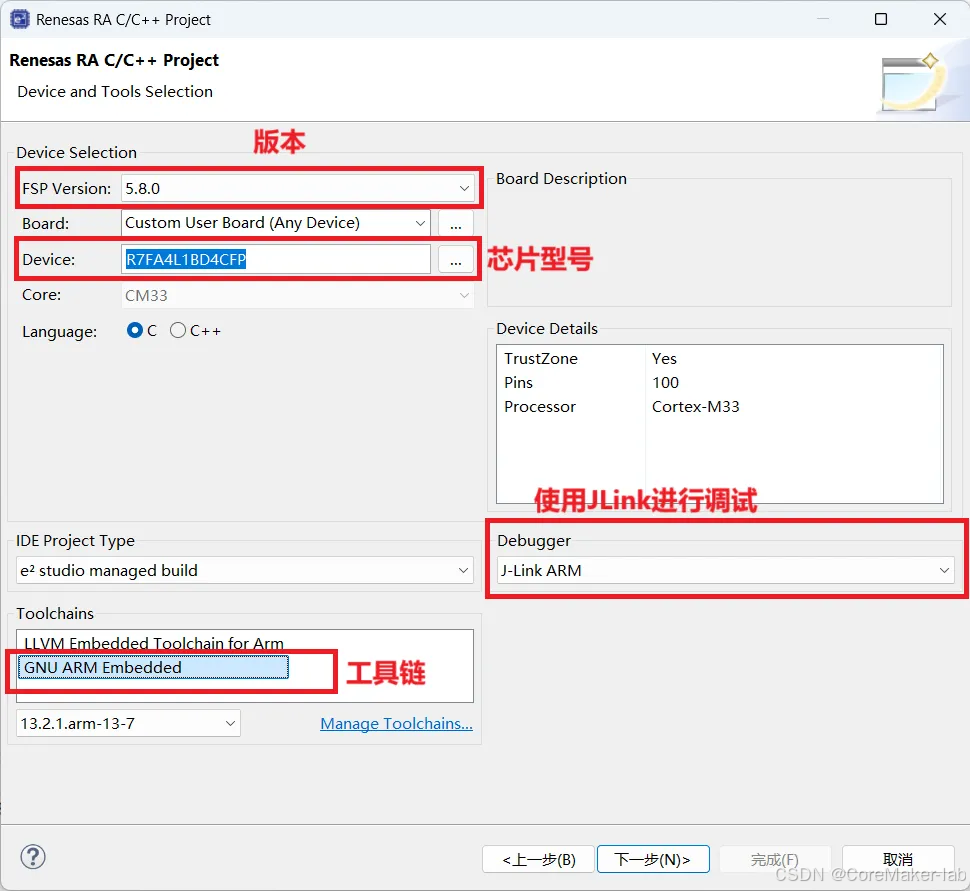
工程模板选择

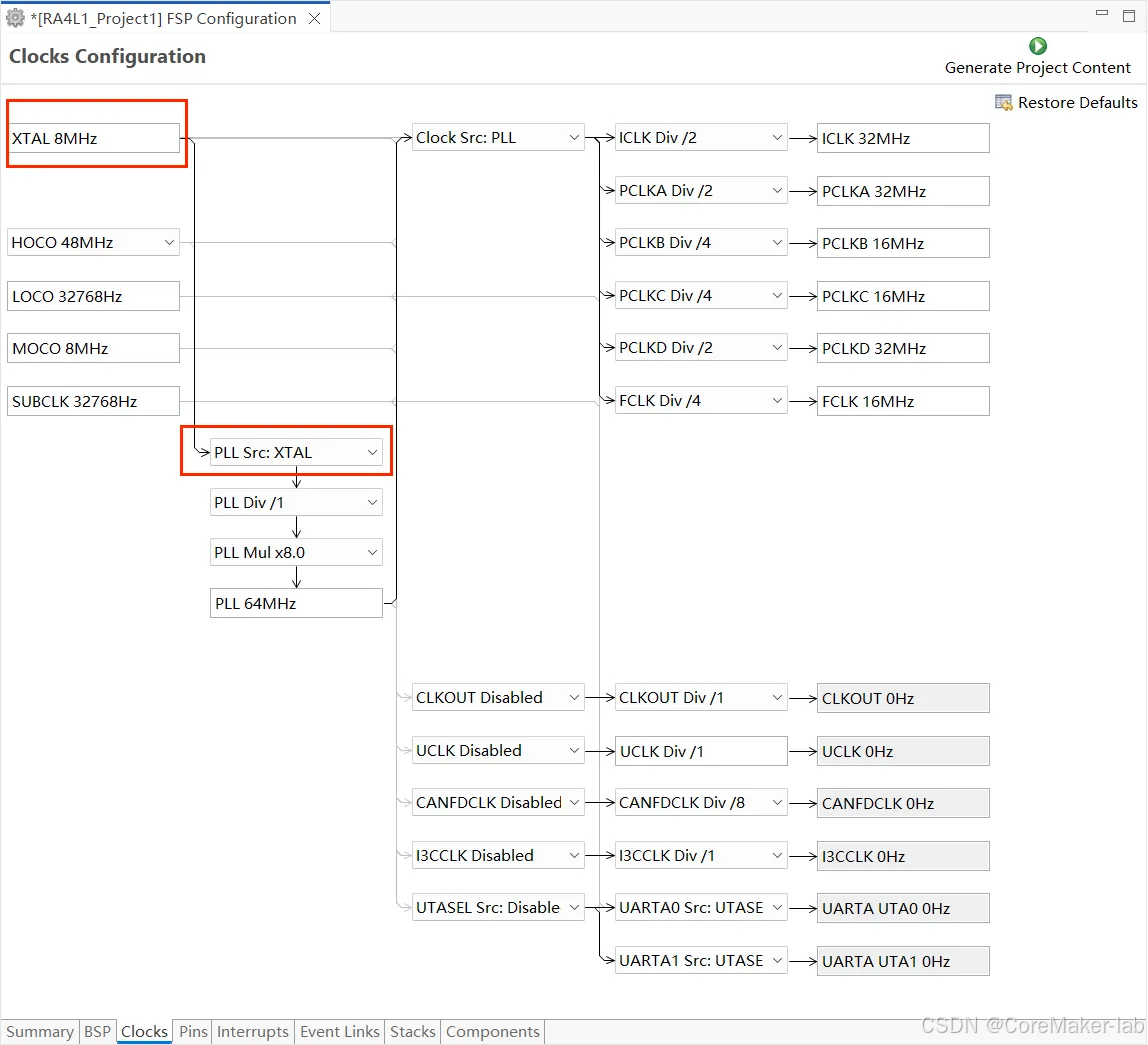
时钟设置
开发板上的外部高速晶振为8M.
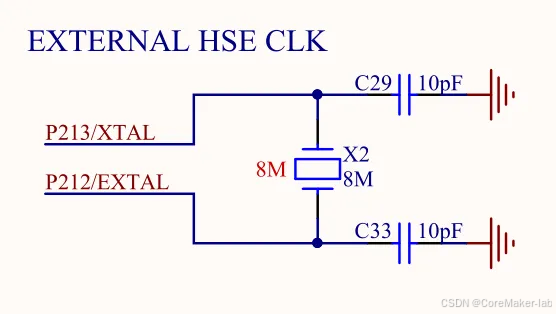
需要修改XTAL为8M。
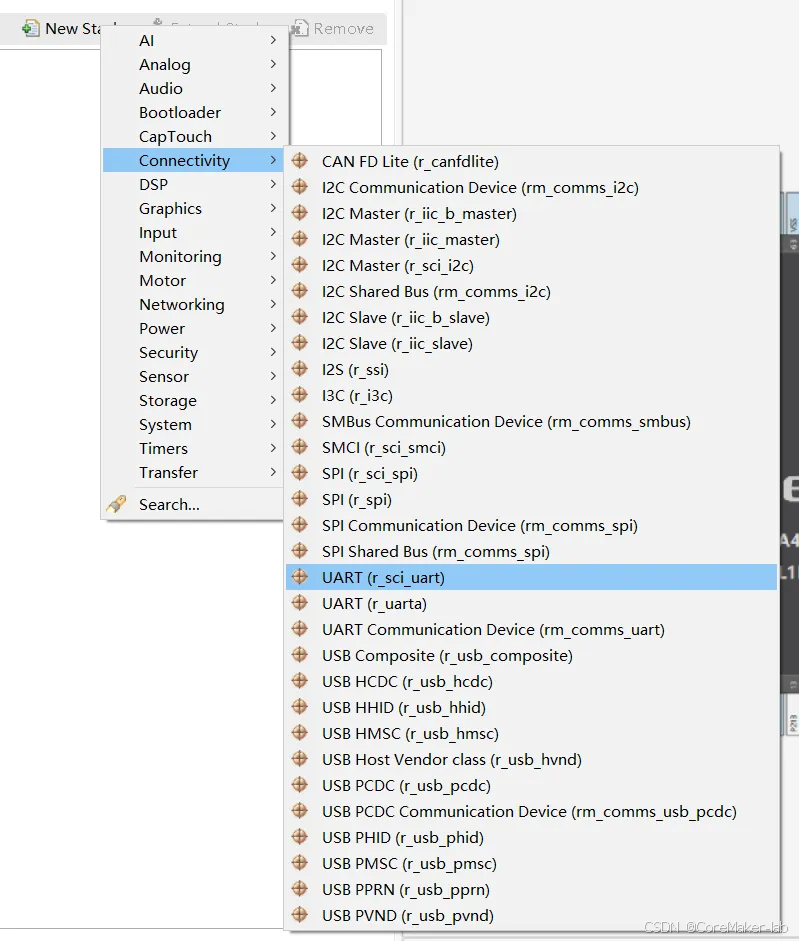
UART配置
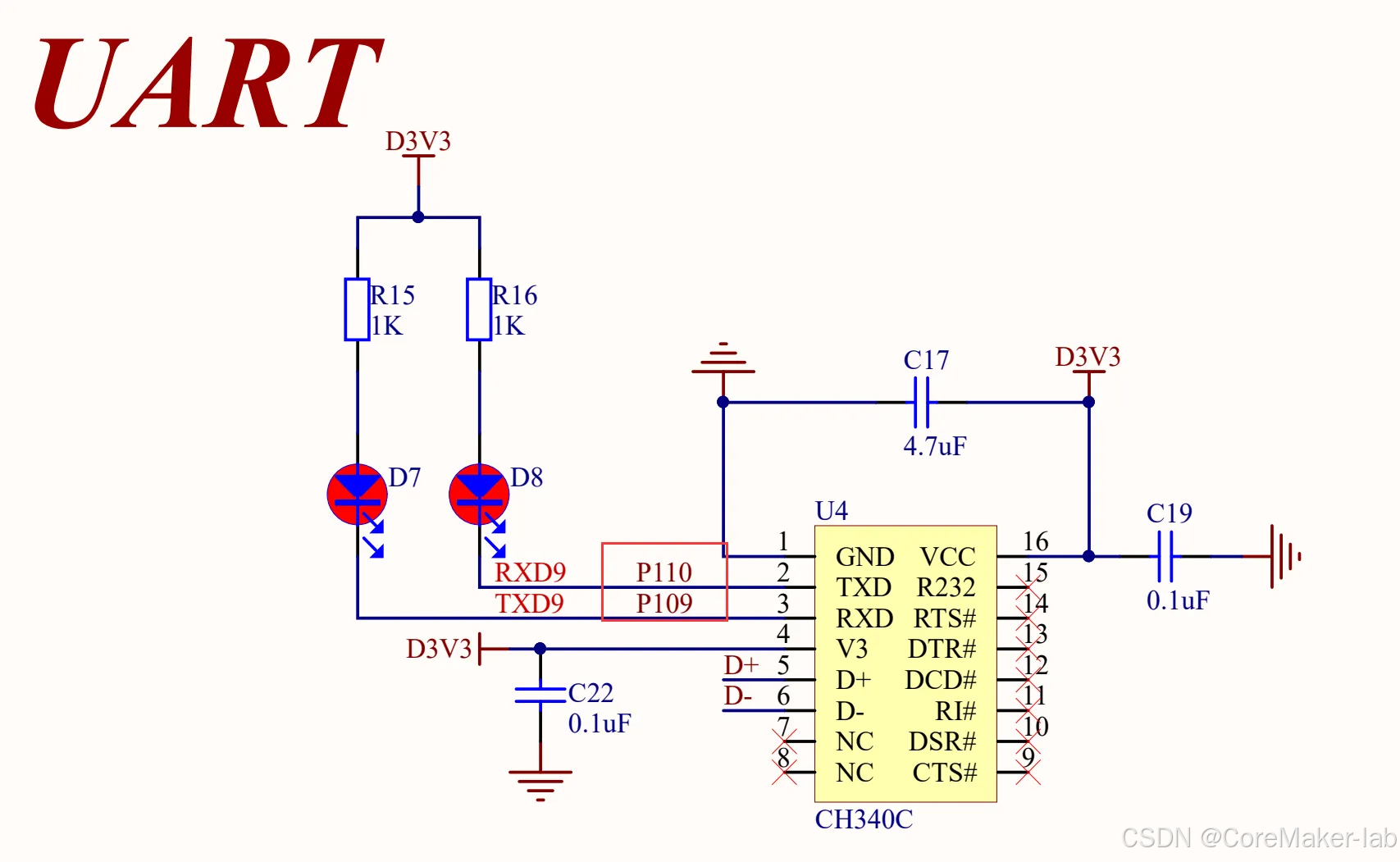
点击Stacks->New Stack->Connectivity -> UART(r_sci_uart)。
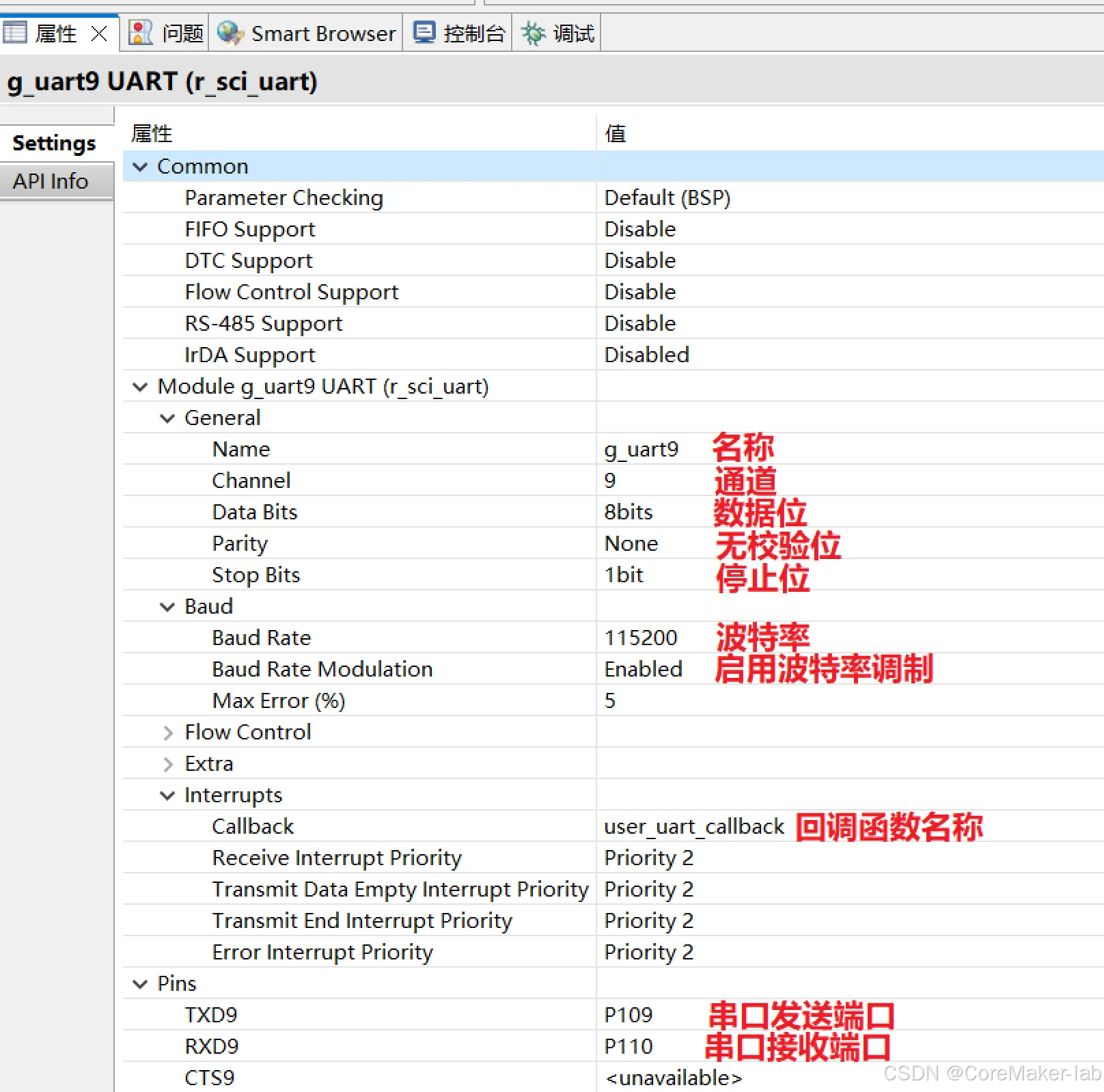
UART属性配置
设置e2studio堆栈
printf函数通常需要设置堆栈大小。这是因为printf函数在运行时需要使用栈空间来存储临时变量和函数调用信息。如果堆栈大小不足,可能会导致程序崩溃或不可预期的行为。
printf函数使用了可变参数列表,它会在调用时使用栈来存储参数,在函数调用结束时再清除参数,这需要足够的栈空间。另外printf也会使用一些临时变量,如果栈空间不足,会导致程序崩溃。
因此,为了避免这类问题,应该根据程序的需求来合理设置堆栈大小。

e2studio的重定向printf设置

在嵌入式系统的开发中,尤其是在使用GNU编译器集合(GCC)时,–specs 参数用于指定链接时使用的系统规格(specs)文件。这些规格文件控制了编译器和链接器的行为,尤其是关于系统库和启动代码的链接。–specs=rdimon.specs 和 --specs=nosys.specs 是两种常见的规格文件,它们用于不同的场景。
–specs=rdimon.specs
用途: 这个选项用于链接“Redlib”库,这是为裸机(bare-metal)和半主机(semihosting)环境设计的C库的一个变体。半主机环境是一种特殊的运行模式,允许嵌入式程序通过宿主机(如开发PC)的调试器进行输入输出操作。
应用场景: 当你需要在没有完整操作系统的环境中运行程序,但同时需要使用调试器来处理输入输出(例如打印到宿主机的终端),这个选项非常有用。
特点: 它提供了一些基本的系统调用,通过调试接口与宿主机通信。
–specs=nosys.specs
用途: 这个选项链接了一个非常基本的系统库,这个库不提供任何系统服务的实现。
应用场景: 适用于完全的裸机程序,其中程序不执行任何操作系统调用,比如不进行文件操作或者系统级输入输出。
特点: 这是一个更“裸”的环境,没有任何操作系统支持。使用这个规格文件,程序不期望有操作系统层面的任何支持。
如果你的程序需要与宿主机进行交互(如在开发期间的调试),并且通过调试器进行基本的输入输出操作,则使用 --specs=rdimon.specs。
如果你的程序是完全独立的,不需要任何形式的操作系统服务,包括不进行任何系统级的输入输出,则使用 --specs=nosys.specs。

R_SCI_UART_Open()函数原型

故可以用 R_SCI_UART_Open()函数进行配置,开启和初始化UART。
/* Open the transfer instance with initial configuration. */
err = R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg);
assert(FSP_SUCCESS == err);
printf("hello world!\n");
回调函数user_uart_callback ()
当数据发送的时候,可以查看UART_EVENT_TX_COMPLETE来判断是否发送完毕。


可以检查检查 “p_args” 结构体中的 “event” 字段的值是否等于 “UART_EVENT_TX_COMPLETE”。如果条件为真,那么 if 语句后面的代码块将会执行。
fsp_err_t err = FSP_SUCCESS;
volatile bool uart_send_complete_flag = false;
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
}
printf输出重定向到串口
打印最常用的方法是printf,所以要解决的问题是将printf的输出重定向到串口,然后通过串口将数据发送出去。
注意一定要加上头文件#include <stdio.h>
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i<size;i++)
{
__io_putchar(*pBuffer++);
}
return size;
}
IIC属性配置
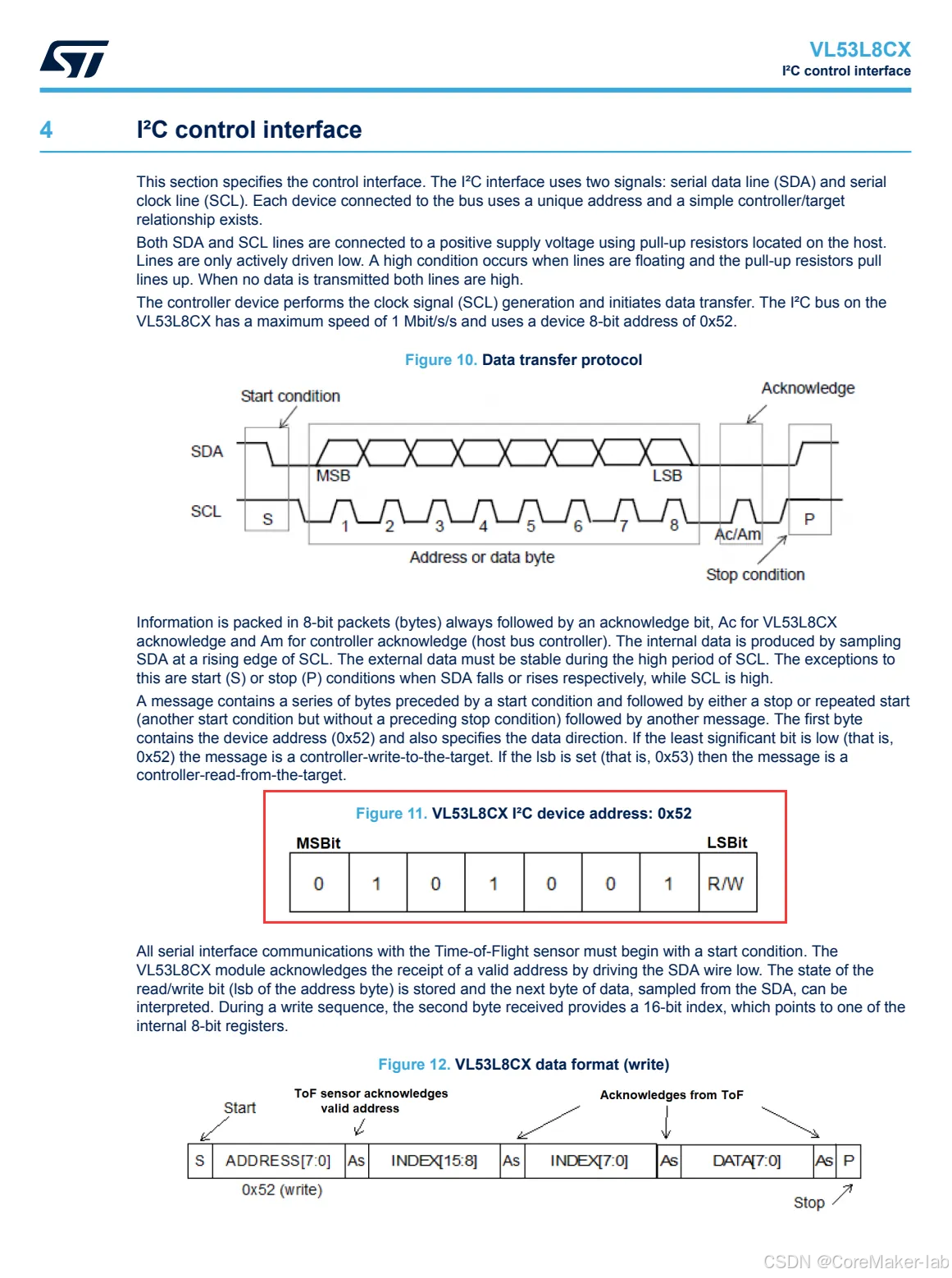
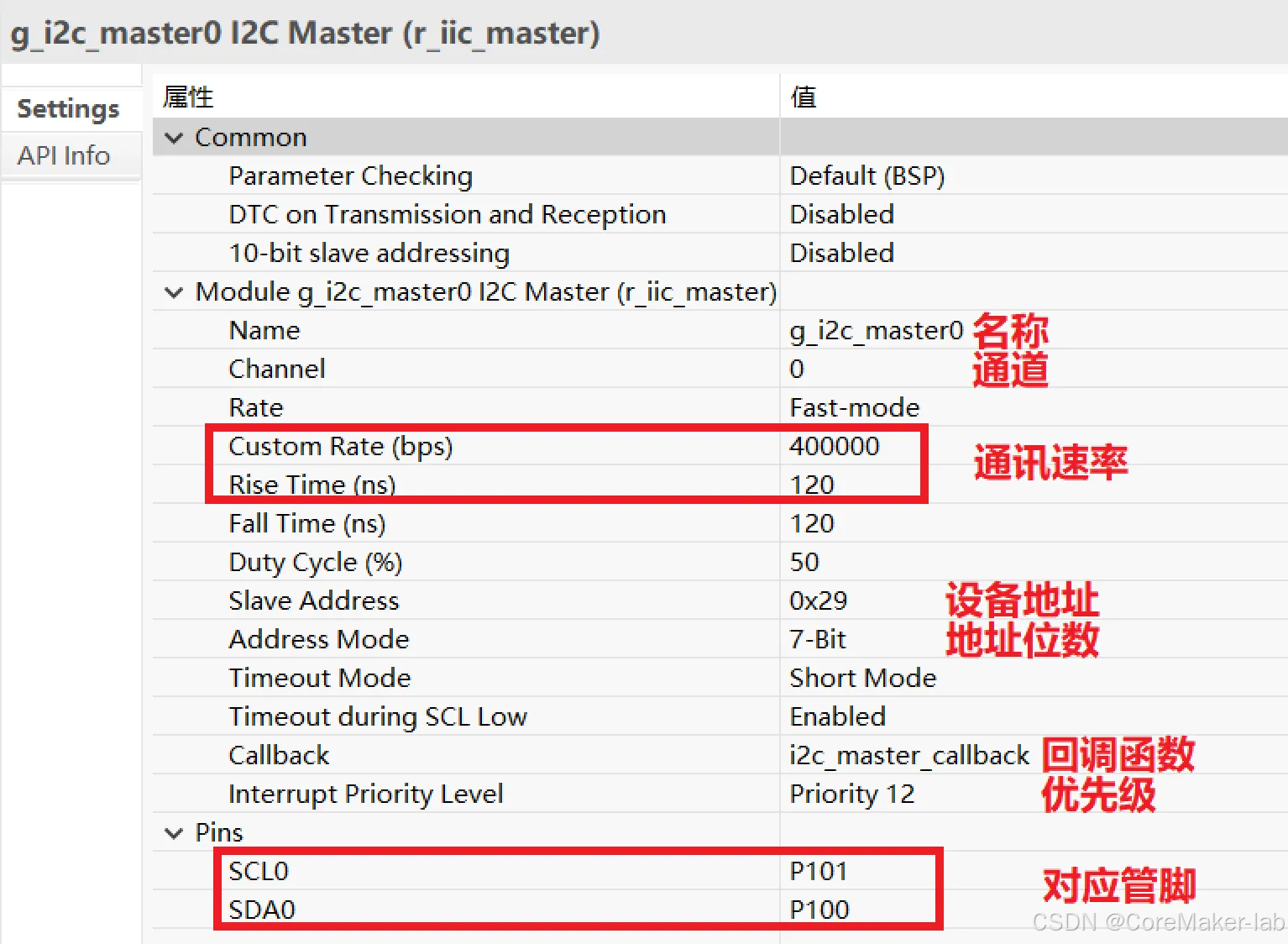
查看手册,可以得知VL53L4CD的IIC地址为“0101001”,即0x29。
IIC配置
配置RA4L1的I2C接口,使其作为I2C master进行通信。
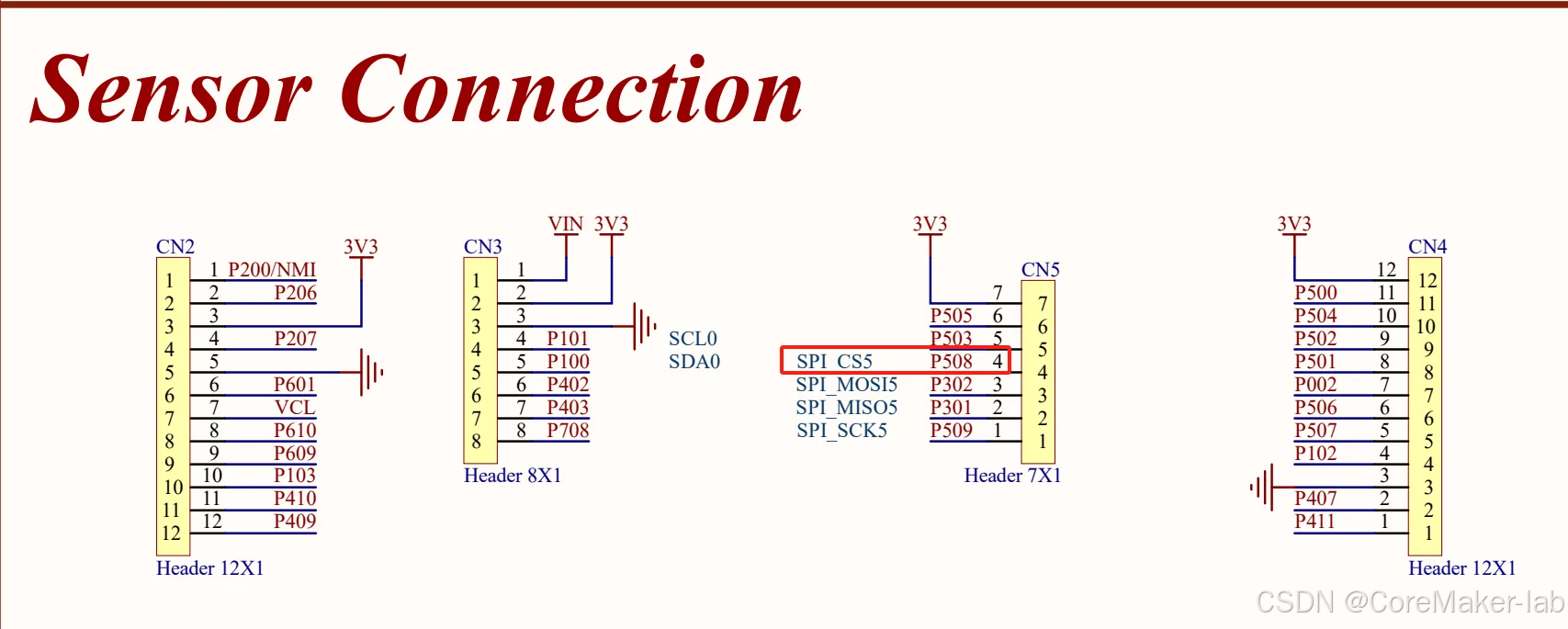
查看开发板原理图,对应的IIC为P100和P101。
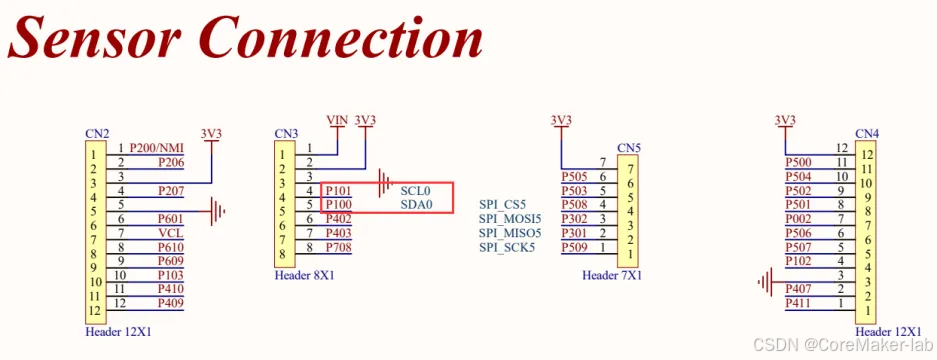
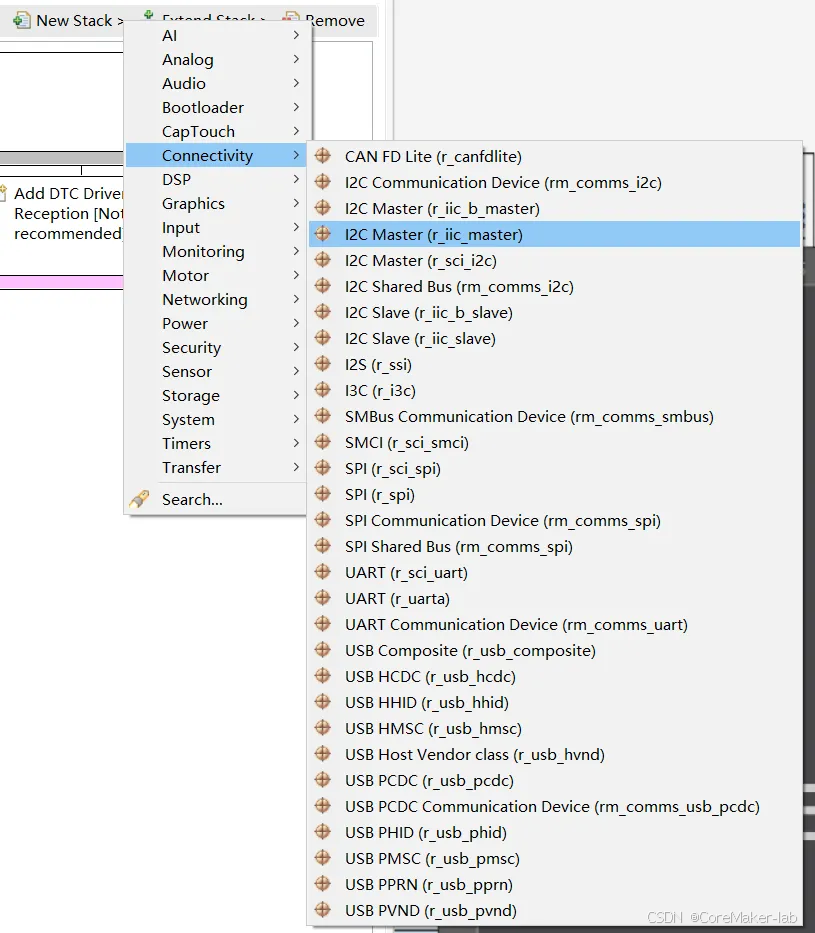
点击Stacks->New Stack->Connectivity -> I2C Master(r_iic_master)。
设置IIC的配置,需要注意从机的地址。
R_IIC_MASTER_Open()函数原型

R_IIC_MASTER_Open()函数为执行IIC初始化,开启配置如下所示。
/* Initialize the I2C module */
err = R_IIC_MASTER_Open(&g_i2c_master0_ctrl, &g_i2c_master0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
R_IIC_MASTER_Write()函数原型
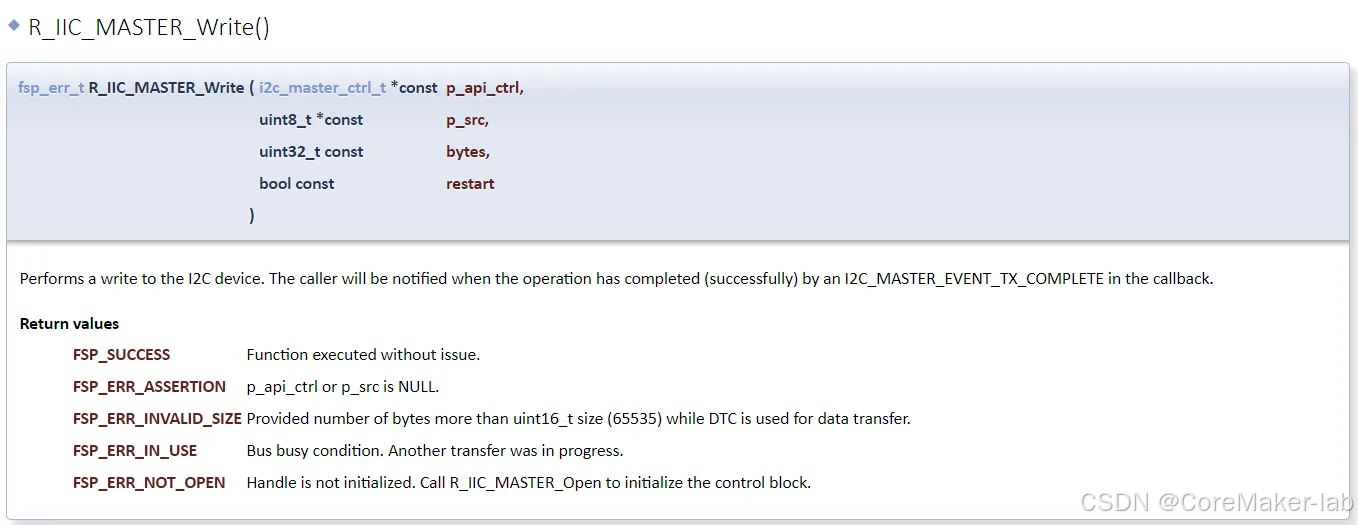
R_IIC_MASTER_Write()函数是向IIC设备中写入数据,写入格式如下所示。
err = R_IIC_MASTER_Write(&g_i2c_master0_ctrl, ®, 1, true);
assert(FSP_SUCCESS == err);
R_IIC_MASTER_Read()函数原型
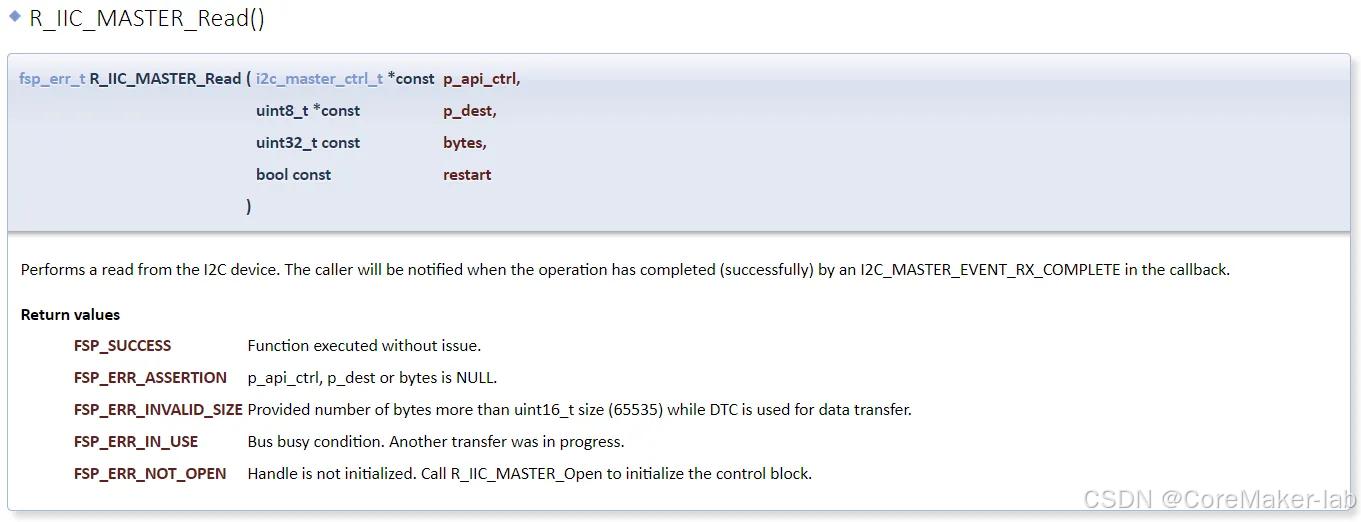
R_IIC_MASTER_Read()函数是向IIC设备中读取数据,读取格式如下所示。
/* Read data from I2C slave */
err = R_IIC_MASTER_Read(&g_i2c_master0_ctrl, bufp, len, false);
assert(FSP_SUCCESS == err);
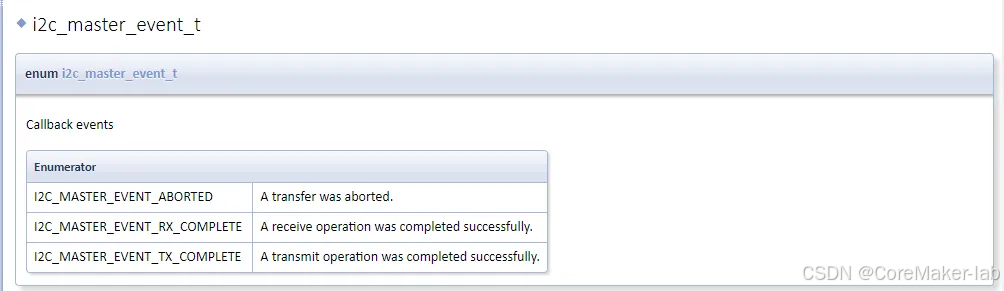
sci_i2c_master_callback()回调函数
对于数据是否发送完毕,可以查看是否获取到I2C_MASTER_EVENT_TX_COMPLETE字段。
/* Callback function */
i2c_master_event_t i2c_event = I2C_MASTER_EVENT_ABORTED;
uint32_t timeout_ms = 1000000;
void i2c_master_callback(i2c_master_callback_args_t *p_args)
{
i2c_event = I2C_MASTER_EVENT_ABORTED;
if (NULL != p_args)
{
/* capture callback event for validating the i2c transfer event*/
i2c_event = p_args->event;
}
}
LPn
LPn (Digital input) 引脚功能说明:
● I²C通信使能控制引脚。
● 当该引脚被拉低(逻辑0),则 禁用 I²C 通信。
● 当该引脚被拉高(逻辑1),则 启用 I²C 通信。
● 当你需要在多器件(多个VL53L8CX传感器)系统中修改I²C地址时,通常会使用该引脚。
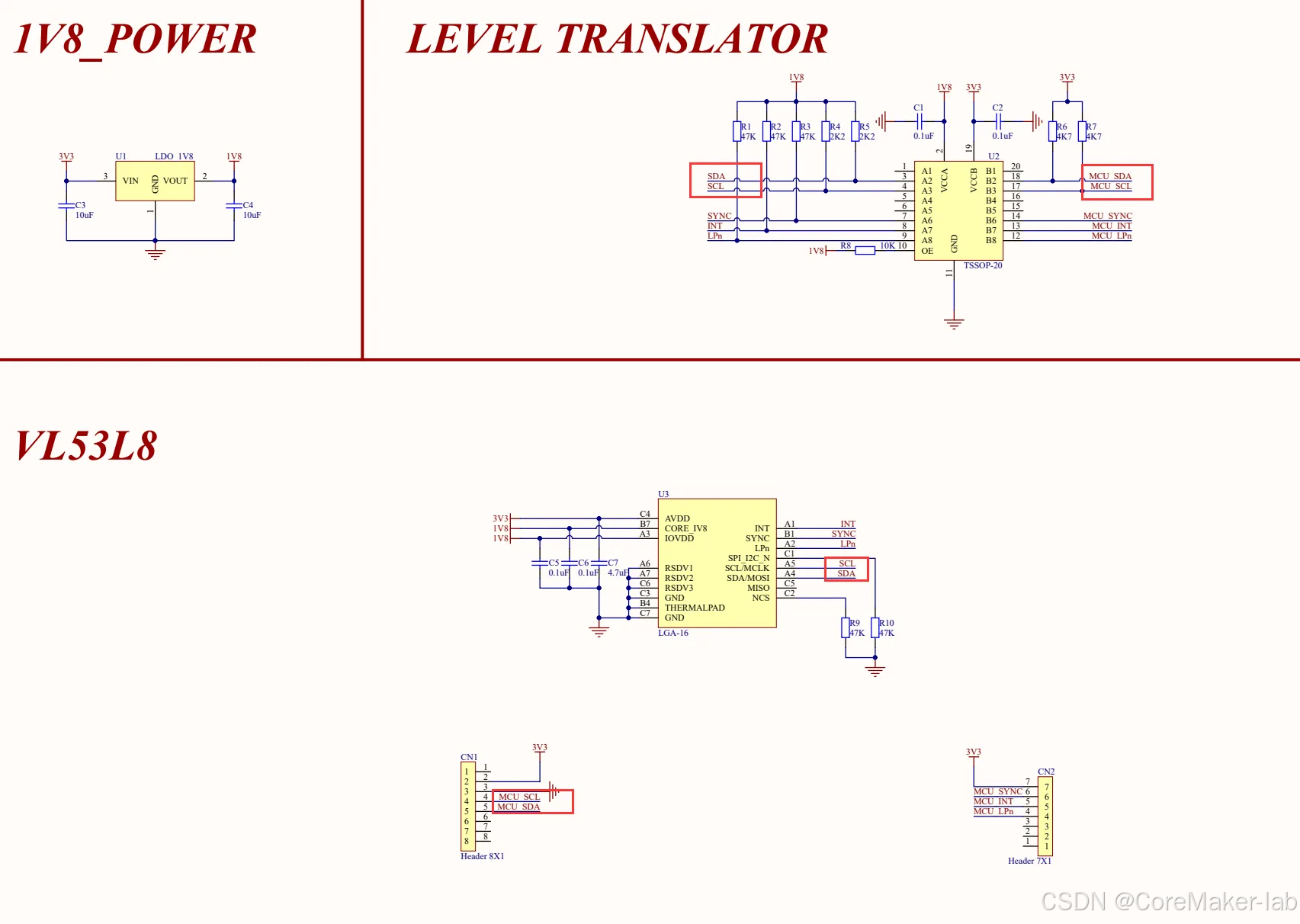
● 如果不使用该引脚(或使用SPI通信),应当通过一个 47 kΩ上拉电阻连接至IOVDD。
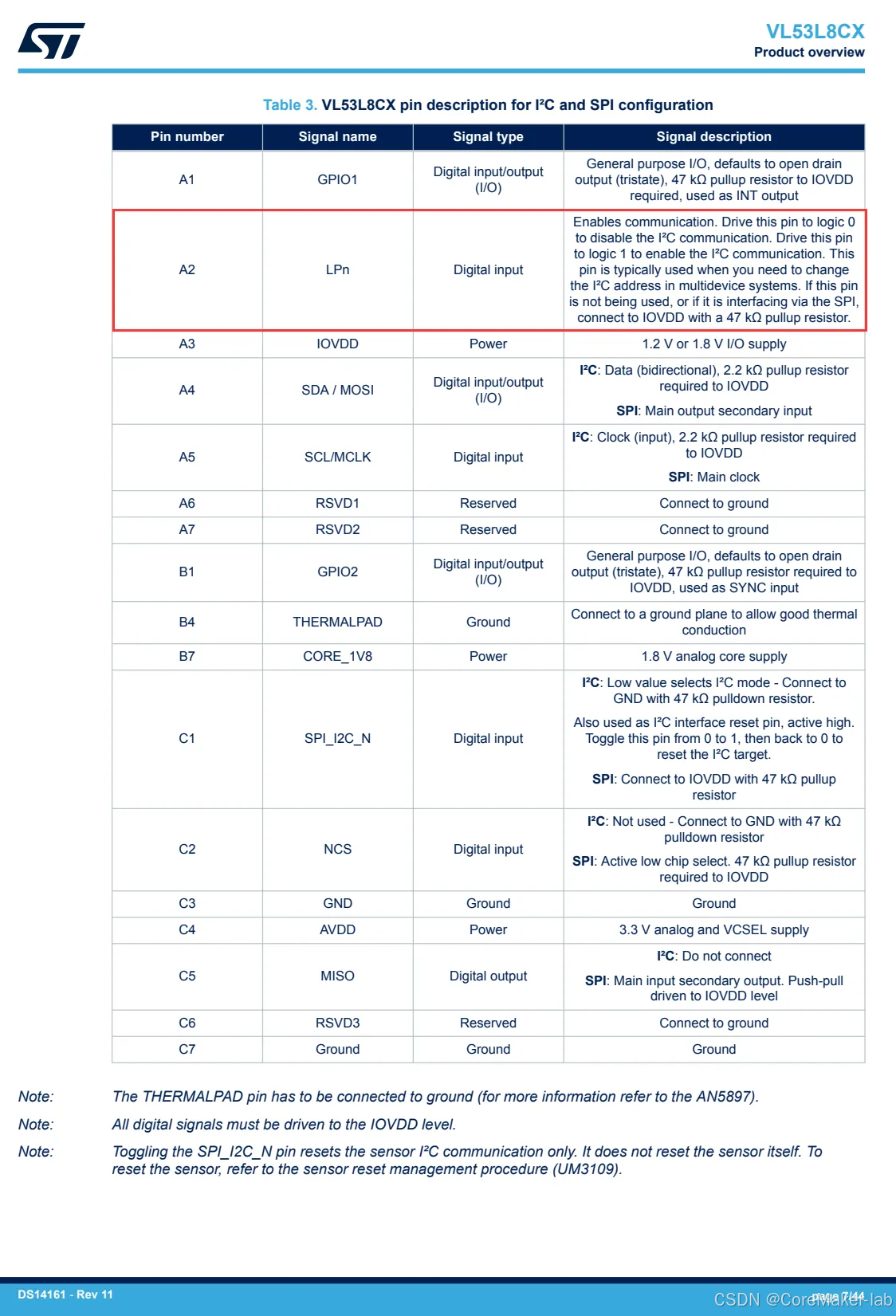
为避免不必要的通信问题,通常建议将LPn引脚通过47 kΩ电阻直接连接到IOVDD引脚。
参考程序
https://www.st.com.cn/zh/imaging-and-photonics-solutions/vl53l8cx.html#tools-software
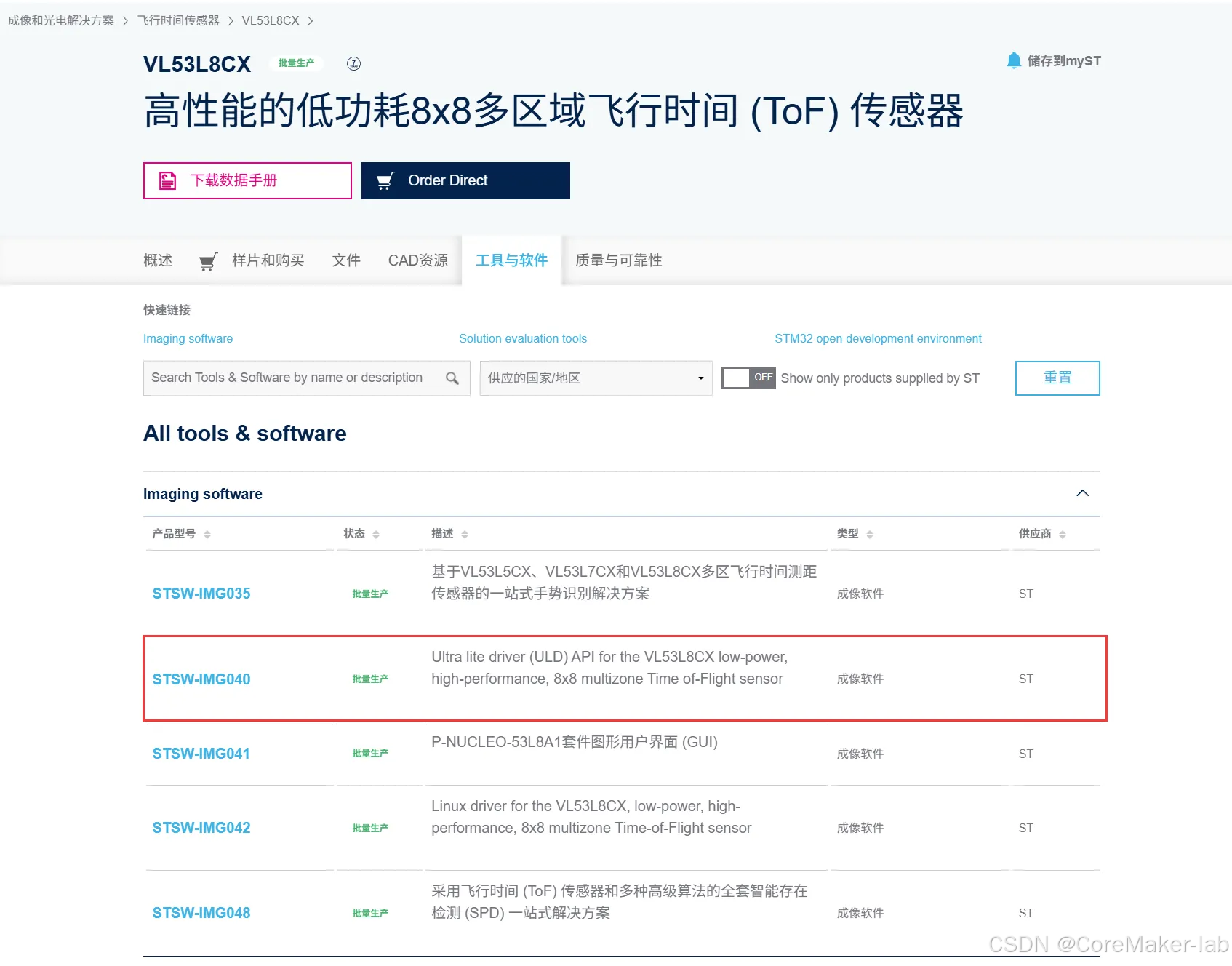
STSW-IMG040
VL53L8CX_ULD API 是一组 C 函数,用于控制 VL53L8CX 设备(例如初始化和测距),以支持最终用户应用程序的开发。VL53L8CX ULD 是一款经过优化的驱动程序,只需三个文件即可实现基本测距。此外,还可以通过插件系统添加更多功能。API 结构使其能够通过良好隔离的平台层(主要用于I²C 访问)在任何平台上进行编译。文中提供了示例代码,演示如何使用 API 并执行测距测量。
VL53L8CX 是一款 8x8 多区域 ToF 测距传感器,可在降低功耗的同时提升环境光下的性能。该传感器基于意法半导体 FlightSense 技术,旨在提供高达 400 厘米的精确测距,对角线视场角为 65°。
该传感器集成了强大的新一代垂直腔面发射激光器 (VCSEL) 和两个先进的超表面透镜。硬件集成在一个创新的“一体化”模块中。这使得更广泛的高性能用例成为可能,例如低功耗系统激活、手势识别、机器人 SLAM、液位监测等等。
VL53L8CX 支持 SPI 和 I²C 接口,可实现高频率帧率和短启动时间。
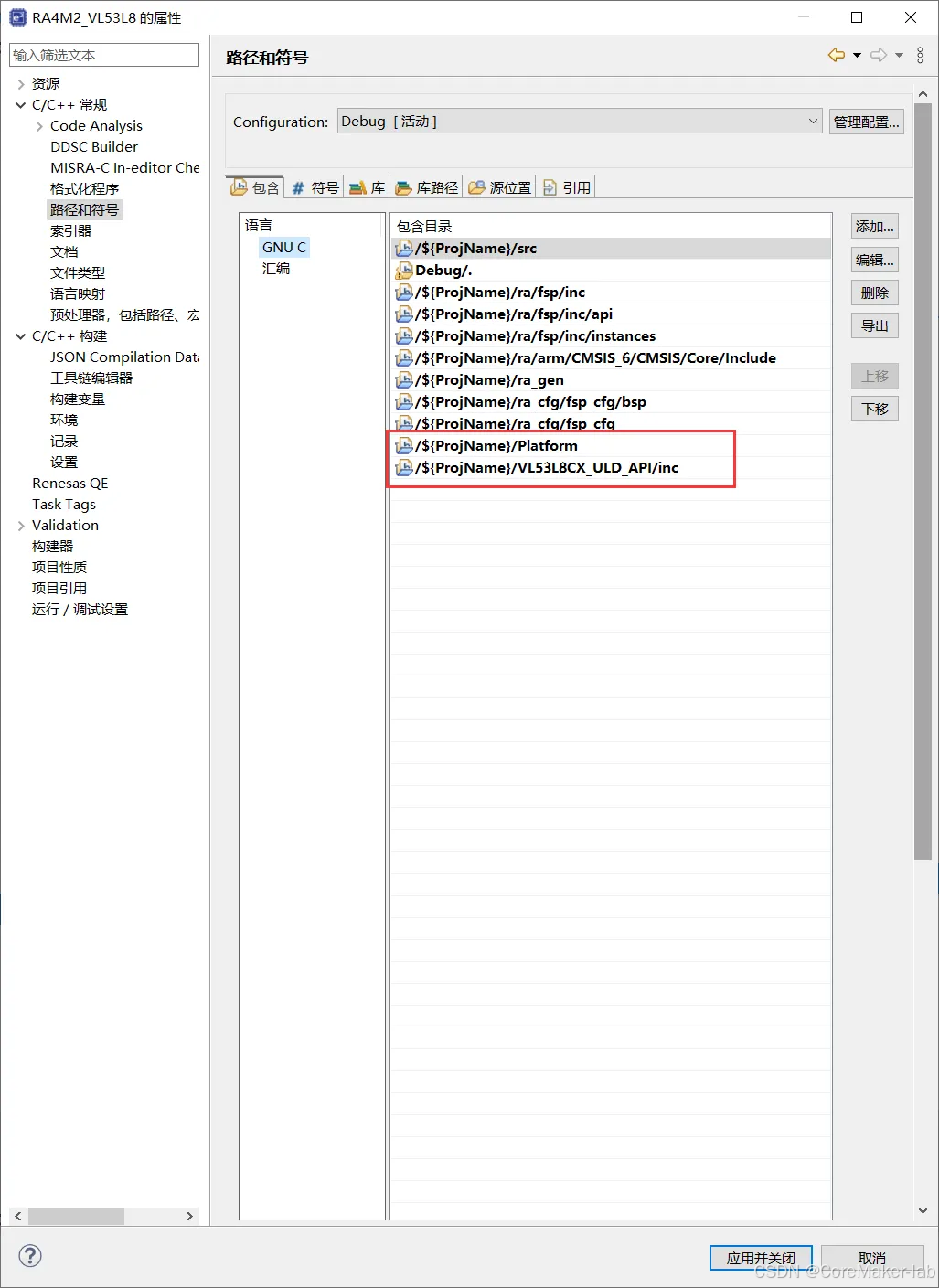
下载完毕之后导入到路径中。
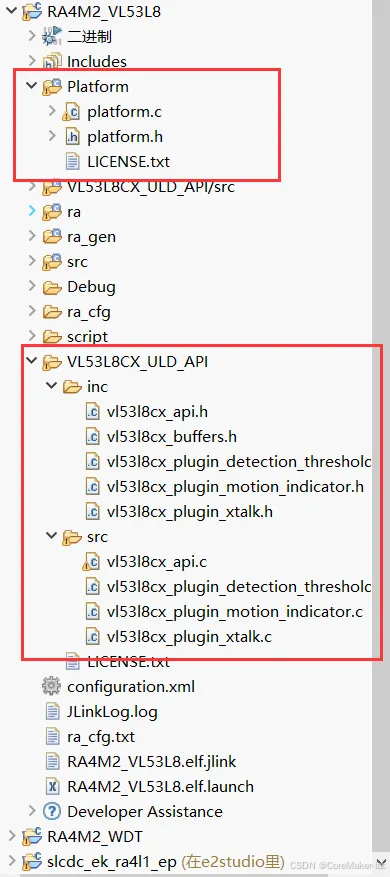
添加路径。
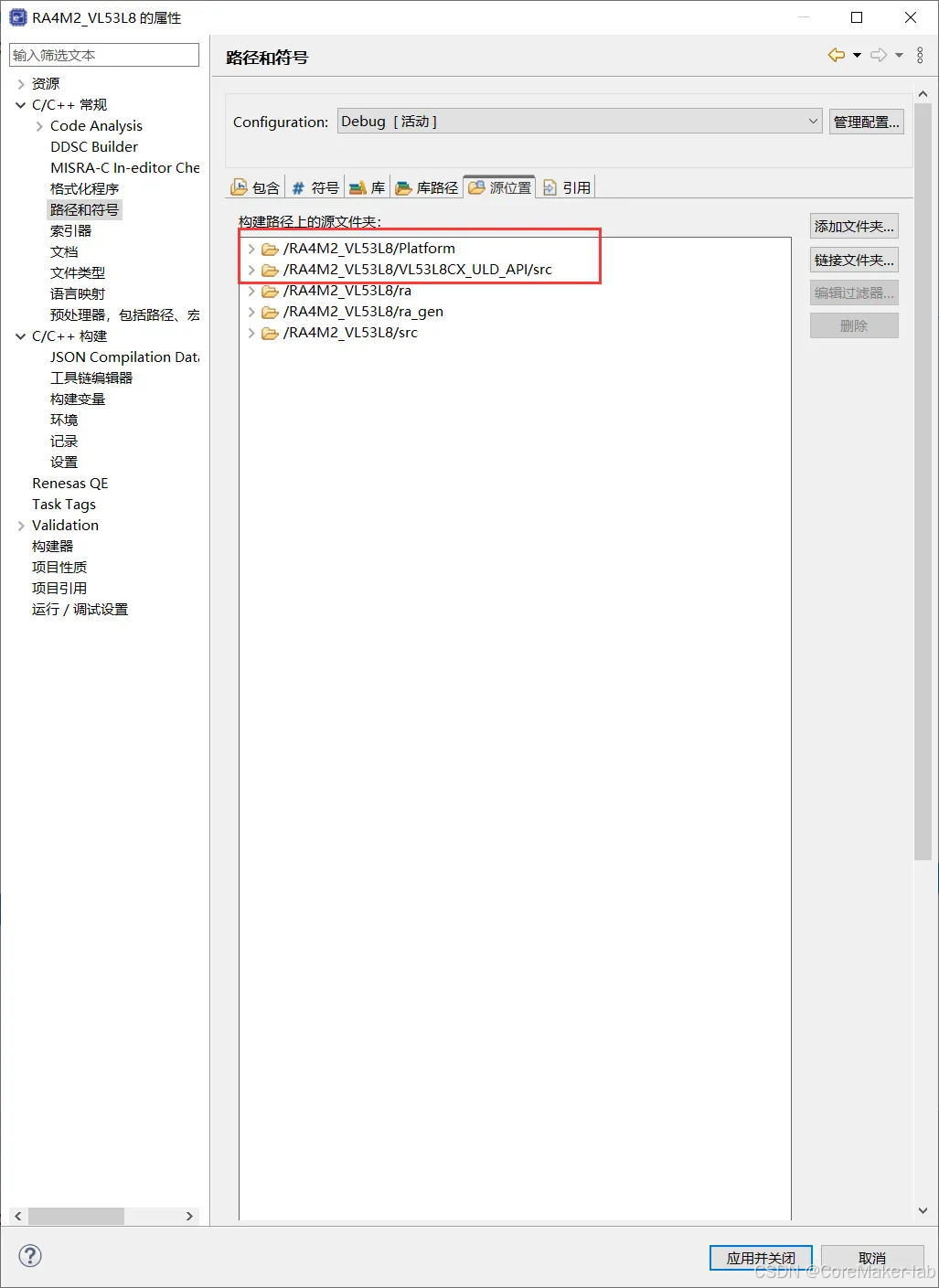
添加源位置。
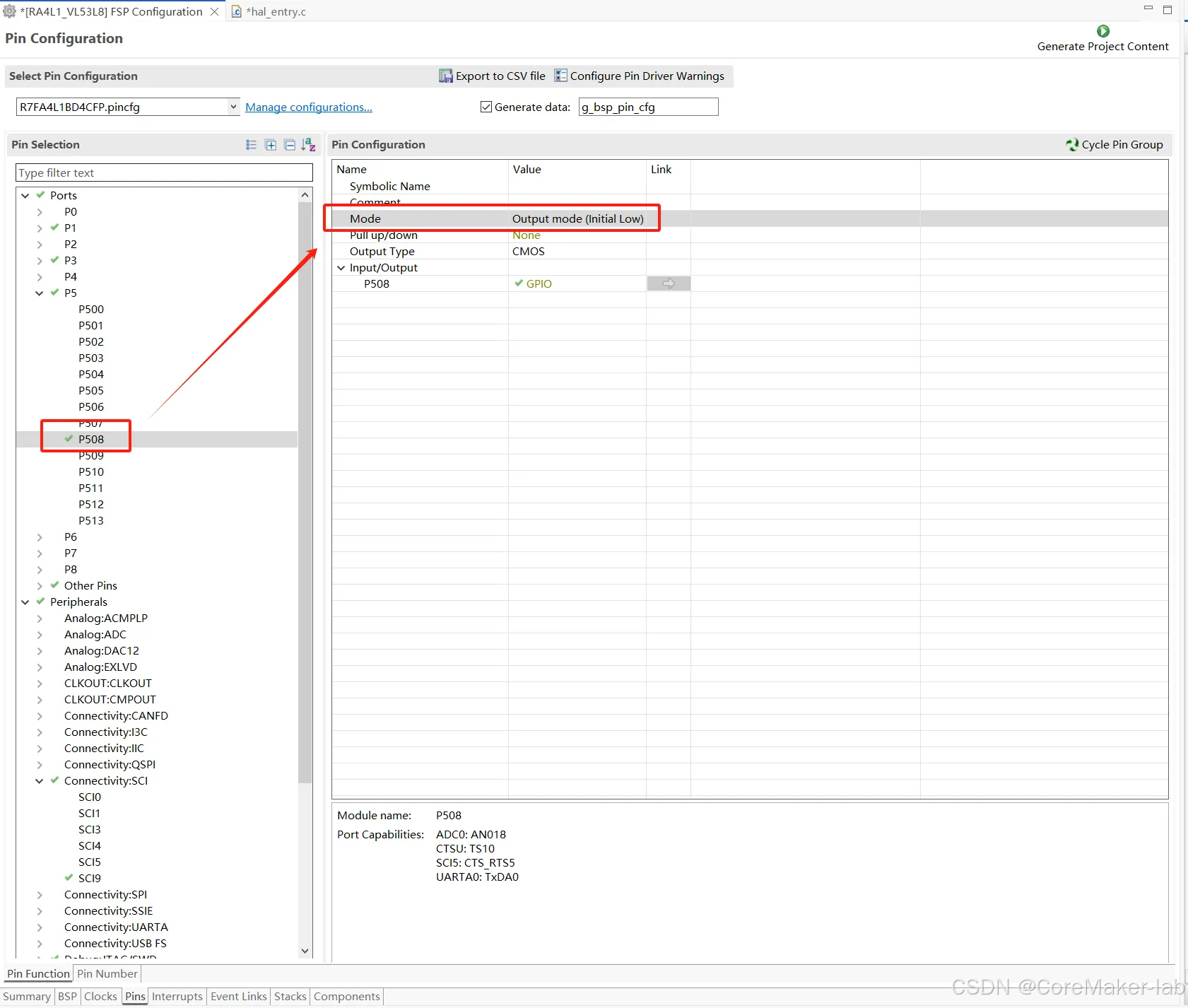
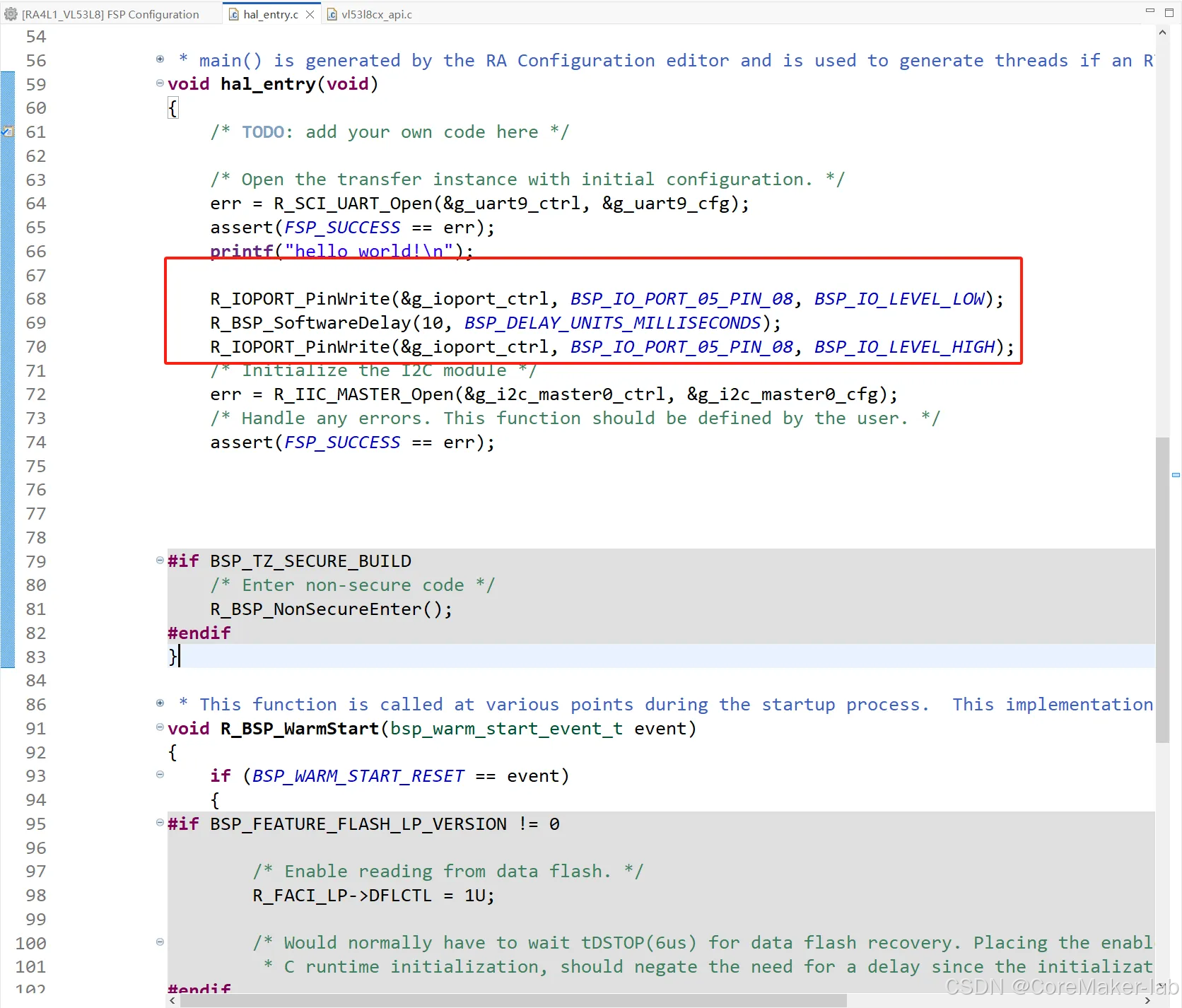
LPn设置
R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_05_PIN_08, BSP_IO_LEVEL_LOW);
R_BSP_SoftwareDelay(10, BSP_DELAY_UNITS_MILLISECONDS);
R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_05_PIN_08, BSP_IO_LEVEL_HIGH);
头文件
在主程序中添加对应头文件。
#include "vl53l8cx_api.h"
添加变量定义。
uint8_t status, loop, isAlive, isReady, i;
VL53L8CX_Configuration Dev; /* Sensor configuration */
VL53L8CX_ResultsData Results; /* Results data from VL53L8CX */
堆栈设置
这种方式一次发送32K(0x8000)数据,数据量过大,容易导致I2C通信超时或触发看门狗复位。
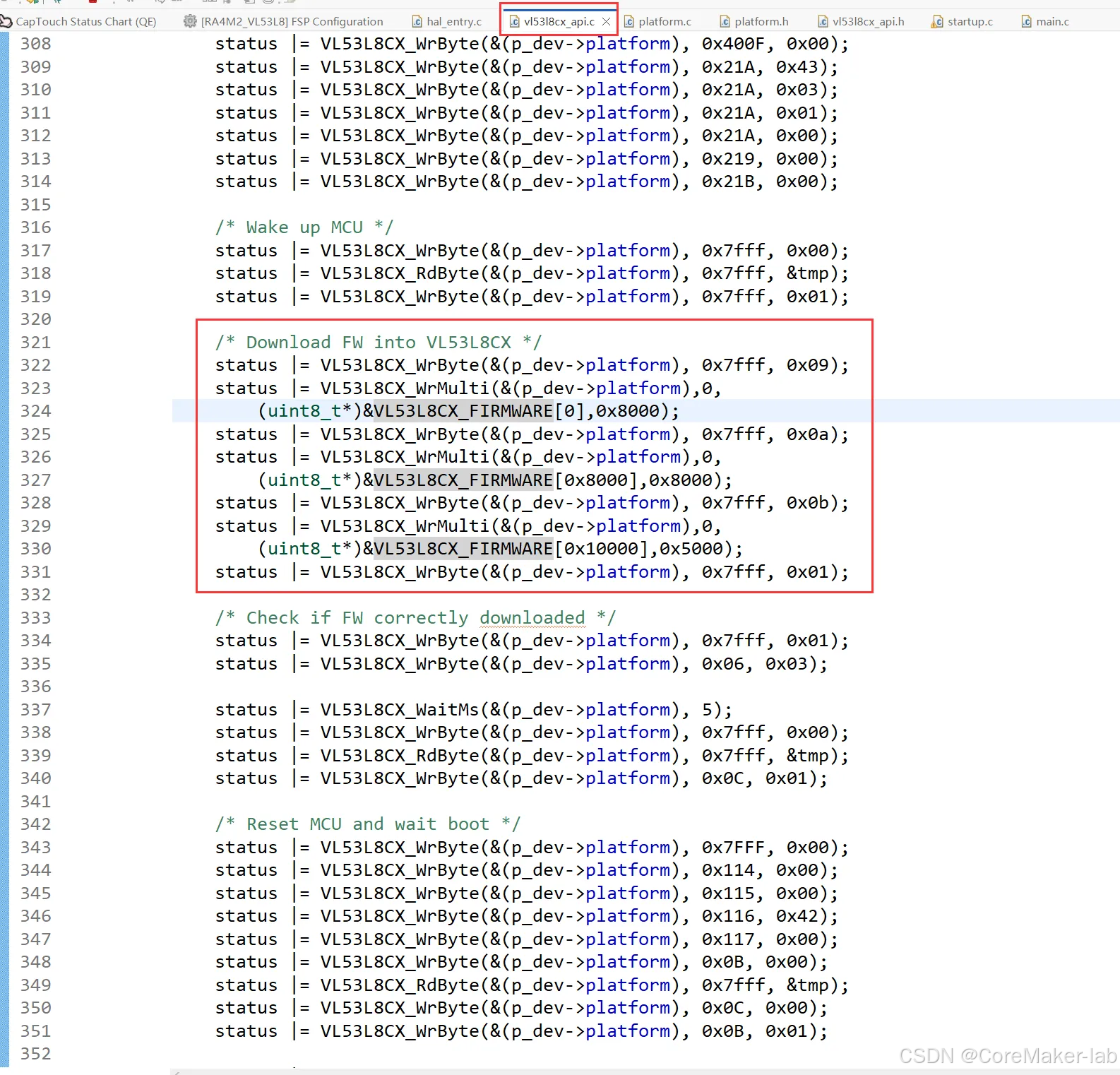
传输32KB数据时使用栈内局部数组或局部缓冲区,32KB可能刚好够或偏紧,可能造成栈溢出(Stack Overflow),从而触发Default_Handler异常。
建议提高栈大小到更高,如0xA000 (40KB)。
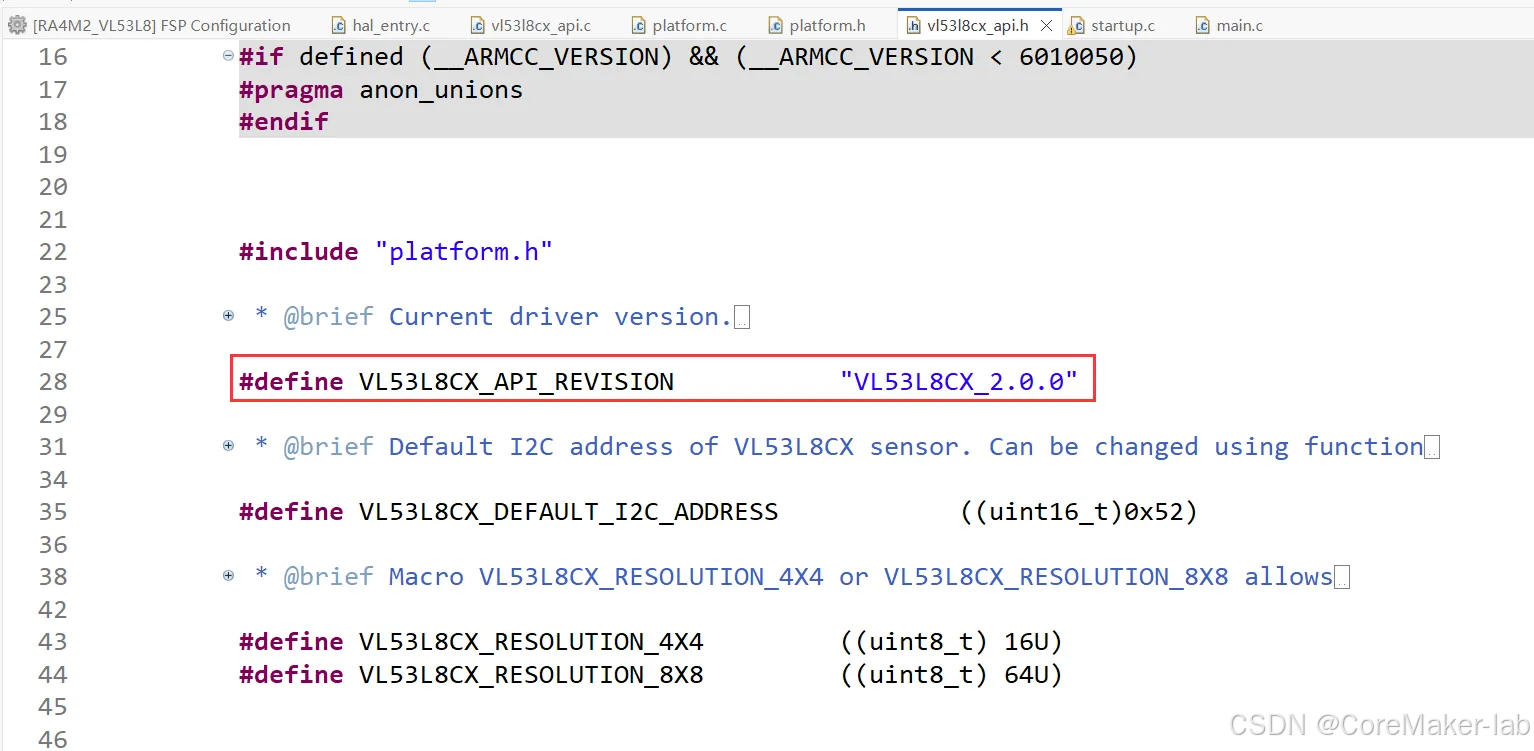
获取版本信息
VL53L8CX_API_REVISION 是一个 字符串宏定义,一般在 vl53l8cx_api.h 中定义,用于标识当前驱动的版本号。
/* Fill the platform structure with customer's implementation. For this
* example, only the I2C address is used.
*/
Dev.platform.address = VL53L8CX_DEFAULT_I2C_ADDRESS;
printf("VL53L8CX ULD ready ! (Version : %s)\n",
VL53L8CX_API_REVISION);
设备存在性检测
函数 vl53l8cx_is_alive() 的作用是获取 VL53L8CX 传感器的设备 ID(0x00)和修订 ID(0x01),用于确认当前连接的硬件是否正确。
在vl53l8cx_api.c中添加打印。
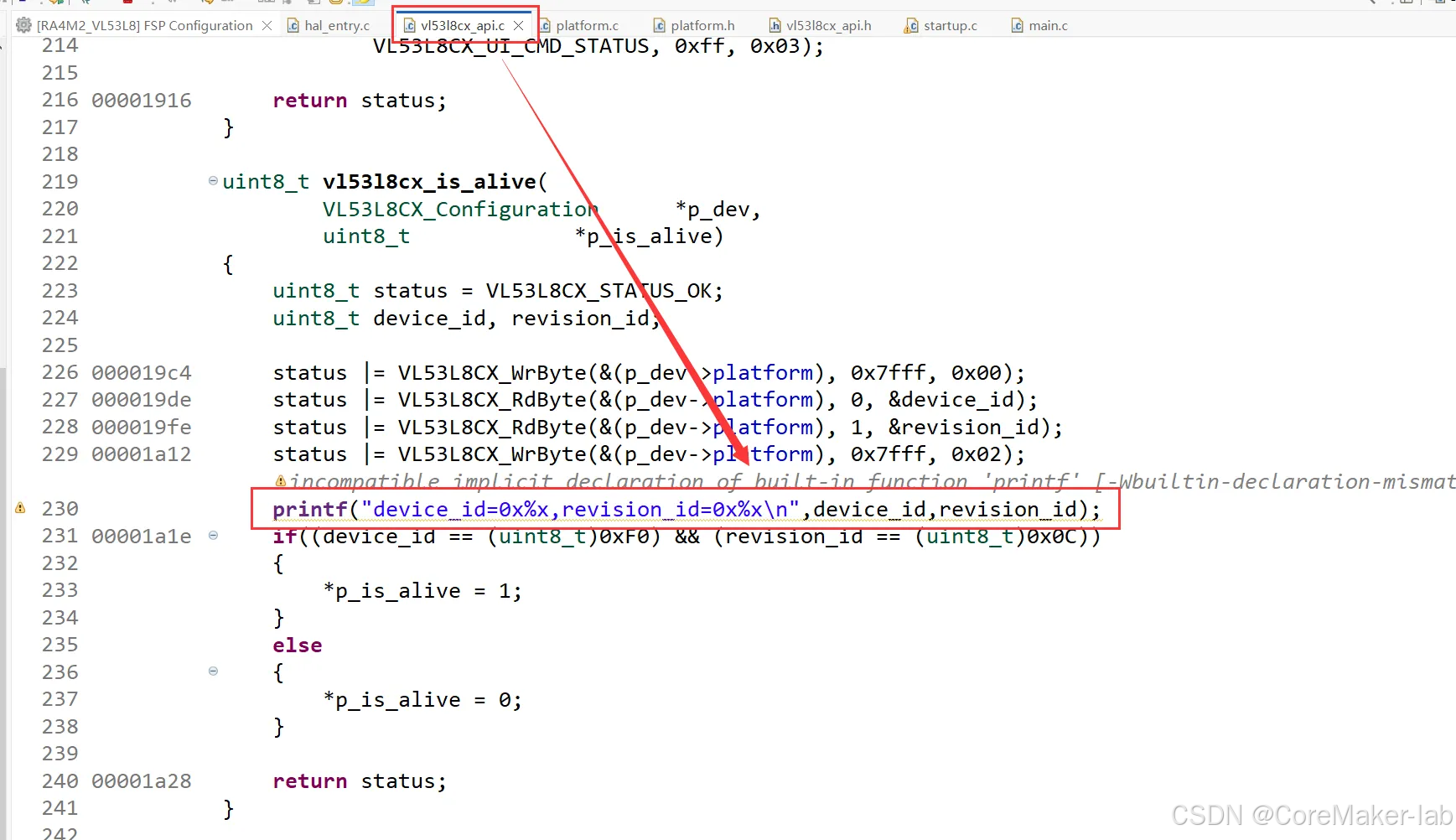
printf("device_id=0x%x,revision_id=0x%x\n",device_id,revision_id);
主程序添加执行检测。
/* (Optional) Check if there is a VL53L8CX sensor connected */
status = vl53l8cx_is_alive(&Dev, &isAlive);
if(!isAlive || status)
{
printf("VL53L8CX not detected at requested address\n");
return status;
}
测距流程
下图展示了 VL53L8CX 传感器测距的一般使用流程(Ranging flow)。具体的流程和函数调用顺序如下:
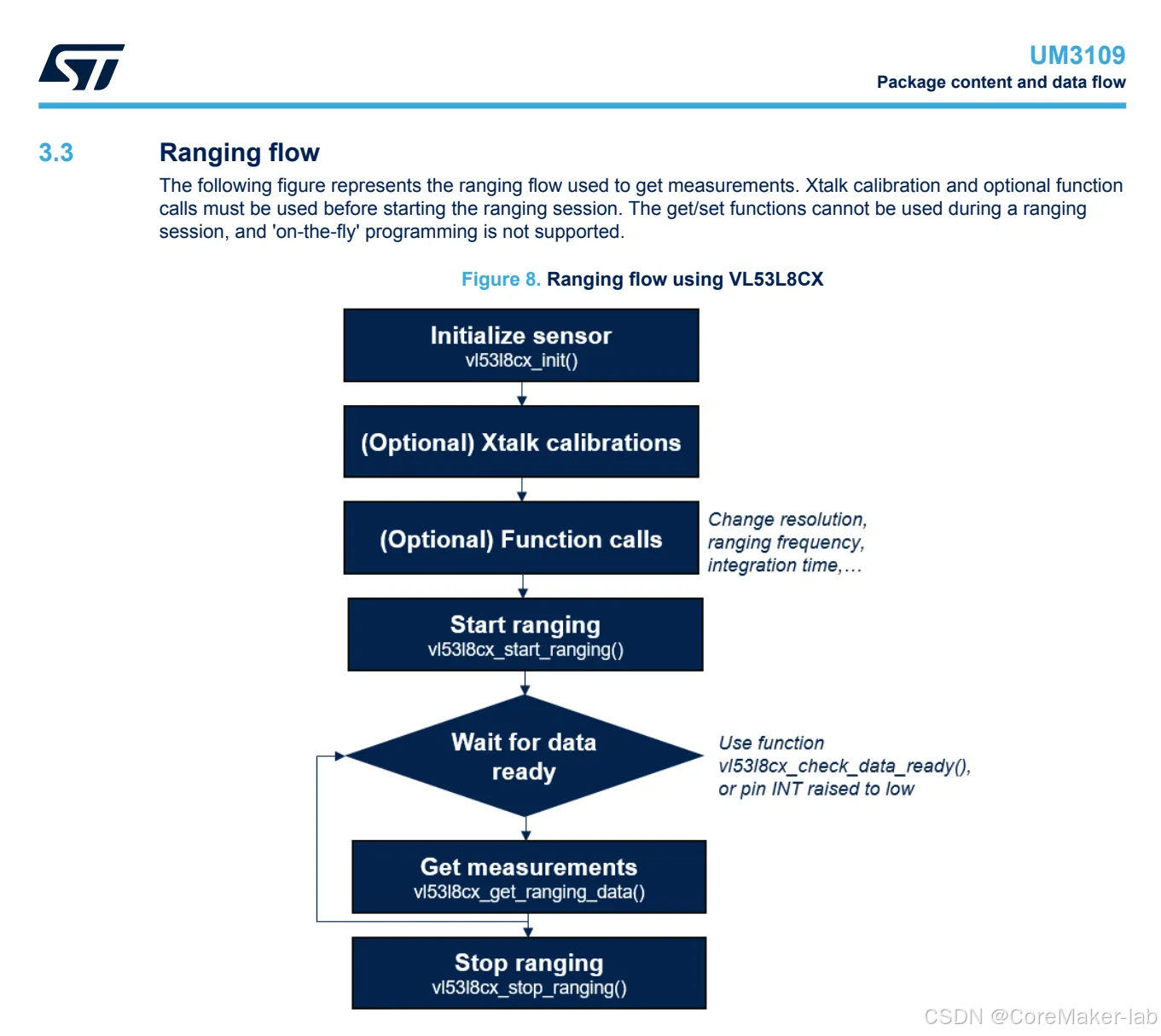
● 初始化传感器 (Initialize sensor)
○ 调用函数:vl53l8cx_init()
○ 用途:加载VL53L8CX的固件,并完成基本初始化,确保设备可以正常通信和测距。
● (可选)进行串扰校准 (Xtalk calibration)
○ 用途:消除光学元件或外壳导致的反射干扰,提高多区测距精度。
○ 示例函数:vl53l8cx_calibrate_xtalk()(根据ST提供的Xtalk校准流程实现)
● (可选)配置测距参数 (Configure sensor settings)
○ 设置分辨率(4x4或8x8)、测量频率、积分时间等关键参数,需在测距开始前完成。
○ 常见函数包括:
■ vl53l8cx_set_resolution():设置测距点阵分辨率
■ vl53l8cx_set_ranging_frequency_hz():设置测距频率
■ vl53l8cx_set_integration_time_ms():设置积分时间
■ vl53l8cx_set_sharpener_percent()、vl53l8cx_set_target_order() 等其他可选功能
● 启动测距 (Start ranging)
○ 调用函数:vl53l8cx_start_ranging()
○ 用途:启动传感器的连续测距功能。
● 等待数据就绪 (Wait for data ready)
○ 用于检测测距数据是否准备好,可以使用轮询方式或外部中断方式。
○ 调用函数:vl53l8cx_check_data_ready()
○ 或监测中断引脚 的电平变化(低表示数据就绪)
● 读取测距数据 (Get measurements)
○ 调用函数:vl53l8cx_get_ranging_data()
○ 用途:获取当前一帧的测距结果(通常是16或64个区域的距离值、强度等信息)
● 停止测距 (Stop ranging)
○ 调用函数:vl53l8cx_stop_ranging()
○ 用途:关闭测距功能,释放传感器资源,允许重新配置。
以上是VL53L8CX传感器标准的测距过程与函数调用顺序。
初始化设备
函数 vl53l8cx_init() 的作用是对 VL53L8CX 传感器进行初始化操作,以确保传感器能够正确工作并加载默认配置。
/* (Mandatory) Init VL53L8CX sensor */
status = vl53l8cx_init(&Dev);
if(status)
{
printf("VL53L8CX ULD Loading failed\n");
return status;
}
启动测距
启动测距操作。根据传感器之前的配置决定传感器运行模式:
/*********************************/
/* Ranging loop */
/*********************************/
status = vl53l8cx_start_ranging(&Dev);
获取测距数据
通过轮询方式 (Polling) 从VL53L8CX传感器获取测距数据。
检查数据是否就绪: 使用轮询方式查询传感器是否已生成新一帧测距数据。
status = vl53l8cx_check_data_ready(&Dev, &isReady);
获取测距数据:读取当前帧的所有测距数据(最多 64 个点,默认是 4x4 即 16 个区域)。
vl53l8cx_get_ranging_data(&Dev, &Results);
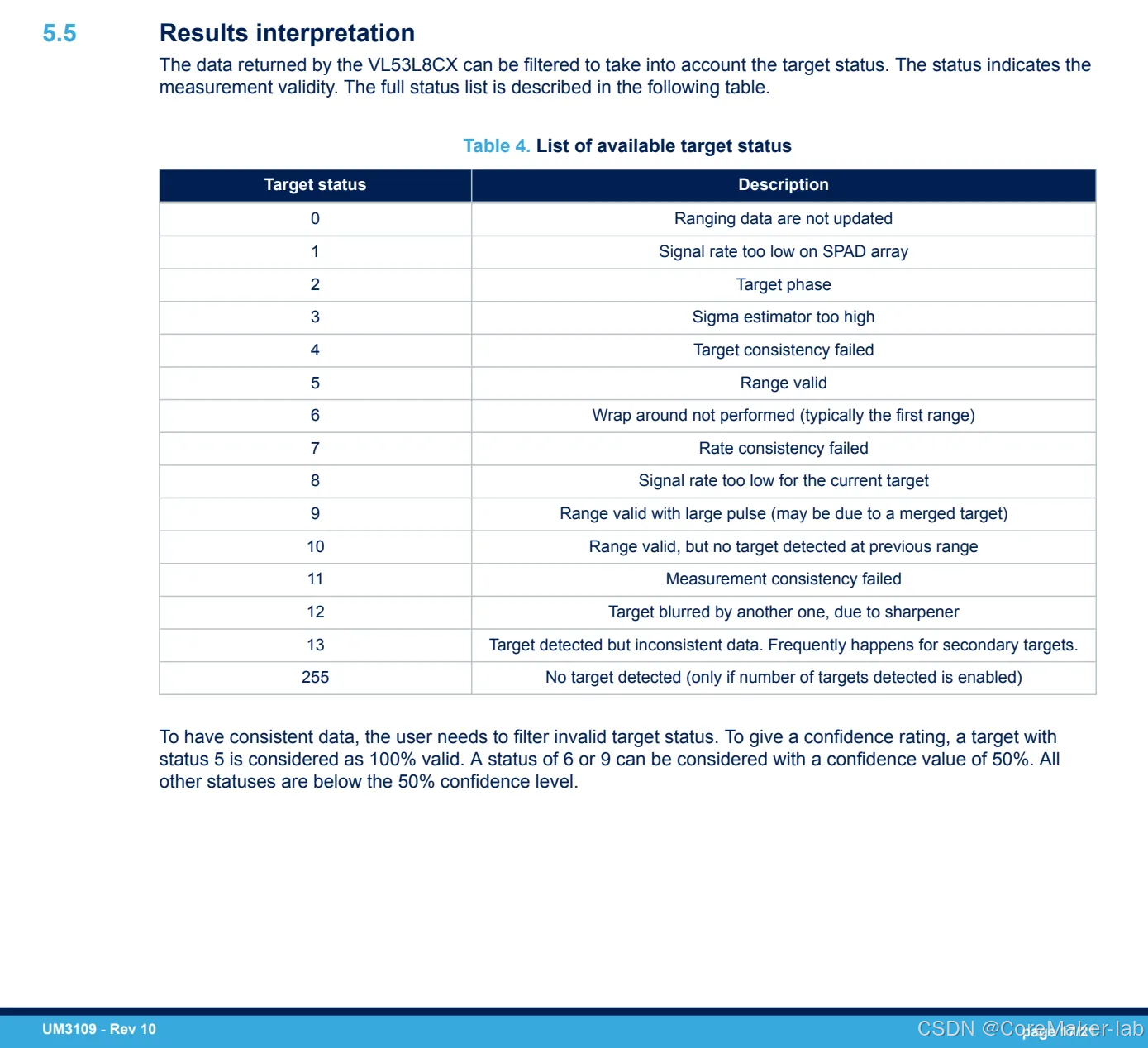
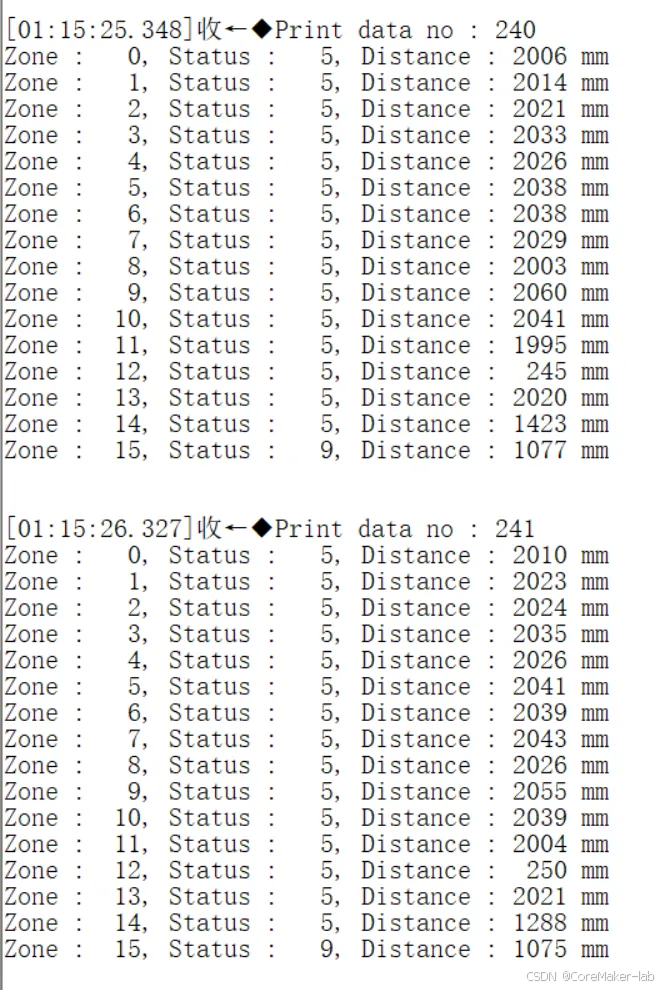
打印每个区域的状态和距离值: 遍历所有区域(zone),打印:
● Zone:区域编号(0~15)
● Status:测距状态(0=有效,其他表示错误或弱信号等)
● Distance:测得的距离,单位为 mm
for(i = 0; i < 16; i++)
{
printf("Zone : %3d, Status : %3u, Distance : %4d mm\n",
i,
Results.target_status[VL53L8CX_NB_TARGET_PER_ZONE*i],
Results.distance_mm[VL53L8CX_NB_TARGET_PER_ZONE*i]);
}
主程序
while(1)
{
/* Use polling function to know when a new measurement is ready.
* Another way can be to wait for HW interrupt raised on PIN A1
* (INT) when a new measurement is ready */
status = vl53l8cx_check_data_ready(&Dev, &isReady);
if(isReady)
{
vl53l8cx_get_ranging_data(&Dev, &Results);
/* As the sensor is set in 4x4 mode by default, we have a total
* of 16 zones to print. For this example, only the data of first zone are
* print */
printf("Print data no : %3u\n", Dev.streamcount);
for(i = 0; i < 16; i++)
{
printf("Zone : %3d, Status : %3u, Distance : %4d mm\n",
i,
Results.target_status[VL53L8CX_NB_TARGET_PER_ZONE*i],
Results.distance_mm[VL53L8CX_NB_TARGET_PER_ZONE*i]);
}
printf("\n");
loop++;
}
/* Wait a few ms to avoid too high polling (function in platform
* file, not in API) */
VL53L8CX_WaitMs(&(Dev.platform), 5);
}
状态定义
演示结果


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









