







一.概念:
凸包(Convex Hull)是一个计算几何(图形学)中的概念。
在一个实数向量空间V中,对于给定集合X,所有包含X的凸集的交集S被称为X的凸包。
X的凸包可以用X内所有点(X1,…Xn)的线性组合来构造.
在二维欧几里得空间中,凸包可想象为一条刚好包著所有点的橡皮圈。
用不严谨的话来讲,给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边型,它能包含点集中所有的点。
例子:假设平面上有p0~p12共13个点,过某些点作一个多边形,使这个多边形能把所有点都“包”起来。当这个多边形是凸多边形的时候,我们就叫它“凸包”。如下图:

二.解法:
Graham扫描法
时间复杂度:O(n㏒n)
思路:Graham扫描的思想是先找到凸包上的一个点,然后从那个点开始按逆时针方向逐个找凸包上的点,实际上就是进行极角排序,然后对其查询使用。
步骤:
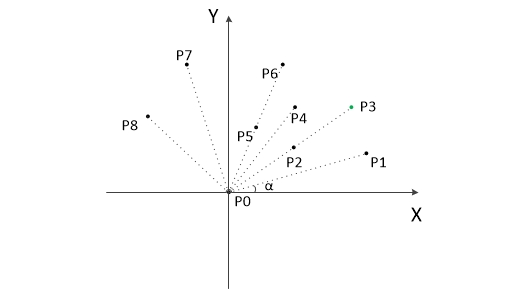
- 把所有点放在二维坐标系中,则纵坐标最小的点一定是凸包上的点,如图中的P0。
- 把所有点的坐标平移一下,使 P0 作为原点,如上图。
现将所有的点按照纵坐标从小到大排序 如果中坐标相同 则按照横坐标从小到大排序
- 计算各个点相对于 P0 的幅角 α ,按从小到大的顺序对各个点排序。当 α 相同时,距离 P0 比较近的排在前面。例如上图得到的结果为 P1,P2,P3,P4,P5,P6,P7,P8。我们由几何知识可以知道,结果中第一个点 P1 和最后一个点 P8 一定是凸包上的点。
(以上是准备步骤,以下开始求凸包)
以上,我们已经知道了凸包上的第一个点 P0 和第二个点 P1,我们把它们放在栈里面。现在从步骤3求得的那个结果里,把 P1 后面的那个点拿出来做当前点,即 P2 。接下来开始找第三个点:
计算各个点相对于 P0 的幅角 α ,按从小到大的顺序对各个点排序
- 除了p0之外的其他点 排序
- 计算其他点和p0的向量叉积
- 从左到右排序
- 连接 栈顶下的第一个点 和 栈顶 的那个点,得到直线 L 。看当前点是在直线 L 的右边还是左边(利用叉积判断位置)。如果在直线的右边就执行步骤5;如果在直线上,或者在直线的左边就执行步骤6。
连接 栈顶下的第一个点 和 栈顶的那个点,得到向量 l1
连接 栈顶下的第一个点 和 当前点,得到向量 l2
计算向量叉积 l1xl2 :
- 如果大于0 则当前点在直线L 的左边
- 如果等于0 则当前点在直线L上
- 如果小于0 则当前点在直线L 的右边
- 如果在右边,则栈顶的那个元素不是凸包上的点,把栈顶元素出栈。执行步骤4。
- 当前点是凸包上的点,把它压入栈,执行步骤7。
- 检查当前的点 P2 是不是步骤3那个结果的最后一个元素。是最后一个元素的话就结束。如果不是的话就把 P2 后面那个点做当前点,返回步骤4。
最后,栈中的元素就是凸包上的点了。
以下为用Graham扫描法动态求解的过程:
下面静态求解过程






三.模板
/*
author: 熊谦智
题目描述:
涉及算法:凸包算法
link: https://www.cnblogs.com/aiguona/p/7232243.html
*/
#include<iostream>
#include<stack>
#include<cmath>
#include<vector>
#include<algorithm>
using namespace std;
const int N = 1005;
struct Node{
int x, y;
};
Node a[N];
Node node;
double distance(const Node& node1, const Node& node2) {
return sqrt((node1.x-node2.x)*(node1.x-node2.x)+(node1.y-node2.y)*(node1.y-node2.y));
}
int vector_product(const Node& node1, const Node& node2, const Node& node3, const Node& node4) {
//(node1,node2) x (node1,node3) 的向量叉积
return (node2.x-node1.x)*(node4.y-node3.y)-(node2.y-node1.y)*(node4.x-node3.x);
}
int cross(node a,node b,node c)//计算叉积 ---- 计算(a,b) x (a,c)
{
return (b.x-a.x)*(c.y-a.y)-(c.x-a.x)*(b.y-a.y);
}
bool cmp3(Node a,Node b)//极角排序另一种方法,速度快
{
if(atan2(a.y-yy,a.x-xx)!=atan2(b.y-yy,b.x-xx))
return (atan2(a.y-yy,a.x-xx))<(atan2(b.y-yy,b.x-xx));
return a.x<b.x;
}
bool cmp1(const Node& node1, const Node& node2) { // 单纯的对点进行排序
if (node1.y == node2.y) return node1.x < node2.x;
return node1.y < node2.y;
}
bool cmp2(const Node& node1, const Node& node2) { // 极角排序
int m = vector_product(node,node1,node,node2) ;
if (m > 0) { // 理解叉积正负的意义 -- 右手定则
return true;
} else if (m == 0) {
double l1 = distance(node,node1);
double l2 = distance(node,node2); // 如果在同一条线上按照距离从小到大排序
return l1 < l2;
} else {
return false;
}
// if(m==0)
// return dis(vex[0],a)-dis(vex[0],b)<=0?true:false;
// else
// return m>0?true:false;
}
int main() {
int n;
while (cin >> n) {
for (int i = 0; i < n; i++) {
cin >> a[i].x >> a[i].y;
}
sort(a,a+n,cmp1);
vector<Node> v(n); //vertor 充当 stack
node = a[0];
int top = 0;
v[top++] = a[0];
sort(a+1,a+n,cmp2);
v[top] = a[1];
for (int i = 2; i < n; i++) {
// while (top > 0 && vector_product(v[top-1],v[top],v[top-1],a[i]) < 0) {
// top--;
// }
while (top > 0 && cross(v[top-1],v[top],a[i]) < 0) {
top--;
}
v[++top] = a[i];
}
double sum = 0;
for (int i = 0; i <= top; i++) {
cout << v[i].x << " " << v[i].y << endl;
if (i != top) {
sum += distance(v[i],v[i+1]);
} else {
sum += distance(v[i],v[0]); //最后一个点和第一个点之间的距离
}
}
printf ("%.2f\n",sum) ;
}
}
/*
Please input the size:
8
1 0
0 1
0 -1
-1 0
2 0
0 2
0 -2
-2 0
输出:(凸包顶点坐标)
0 -2
2 0
0 2
-2 0
*/
总结
在图形学中,凸包是一个非常重要的概念。简明的说,在平面中给出N个点,找出一个由其中某些点作为顶点组成的凸多边形,恰好能围住所有的N个点。该凸包算法又叫Graham Scan法。点排序时间复杂度O(nlogn), 检查每个点O(n), 综合时间复杂度O(nlogn).
参考链接:
https://www.cnblogs.com/aiguona/p/7232243.html
https://blog.csdn.net/qq_39747794/article/details/81563346
https://blog.csdn.net/bone_ace/article/details/46239187

















 3250
3250

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









