









由于之前介绍过一次关于实现自己的网络层的文章,但是那篇文章偏难,这次我以最简单的对图像进行缩放的层为例进行实现。
在进行讲解之前,有一些必要条件你需要掌握,那就是你已经很了解怎么安装caffe,并且知道caffe里头的各个目录。
首先我们设计我们层所拥有的参数
out_height,即输出的图像的高度
out_width,即输出图像的宽度
visualize,是否需要将图像显示出来
那么可以在src/caffe/proto/caffe.proto文件中加入如下代码:
message ImageScaleParameter {
// Specify the output height and width
optional uint32 out_height = 1;
optional uint32 out_width = 2;
// for debug you can see the source images and scaled images
optional bool visualize = 3 [default = false];
}
这里就指定了参数的名称以及参数的类型,optional说明该参数是可选的可以出现也可以不出现,此外[default=false]表明该参数的默认值是false
每个参数都指定一个数字表明参数的标识。
接着,我们可以将我们设计好的参数放入
LayerParameter里头:
optional HingeLossParameter hinge_loss_param = 114;
optional ImageDataParameter image_data_param = 115;
optional ImageScaleParameter image_scale_param = 147;
optional InfogainLossParameter infogain_loss_param = 116;
optional InnerProductParameter inner_product_param = 117;
注意加入的时候看一看
LayerParameter的注释,当你修改完毕了也要注意加入这样提示,这样方便后人更加方便地添加自定义层
// LayerParameter next available layer-specific ID: 148 (last added: image_scale_param)
接下来我们实现我们自己的层的头文件:
(1)实现的首先需要设置不允许头文件重复加入的宏定义:
#ifndef CAFFE_IMAGE_SCALE_LAYER_HPP_
#define CAFFE_IMAGE_SCALE_LAYER_HPP_
(2)加入必要的头文件
#include "caffe/blob.hpp"
#include "caffe/layer.hpp"
#include "caffe/proto/caffe.pb.h"
#include "caffe/layer.hpp"
(3)加入返回的层的类型字符串
virtual inline const char* type() const { return "ImageScale"; }
(4)告诉caffe本层的输入有几个,输出有几个
virtual inline int ExactNumBottomBlobs() const { return 1; }
virtual inline int ExactNumTopBlobs() const { return 1; }
(5)由于本层实现是图像的缩放,所以不需要反传,因此直接写一个空的虚函数的实现
virtual void Backward_cpu(const vector<Blob<Dtype>*>& top,
const vector<bool>& propagate_down, const vector<Blob<Dtype>*>& bottom) {};
(6)定义在使用过程中所使用的类中的成员变量,注意类的成员变量的命名最后是以下划线结束,这样能够保持与caffe的代码一致性
int out_height_;
int out_width_;
int height_;
int width_;
bool visualize_;
int num_images_;
int num_channels_;
(7)最后别忘记加入endif这个宏,此外注意加入必要的注释,以表明这个endif所对应的开头是什么
#endif // CAFFE_IMAGE_SCALE_LAYER_HPP_
下面给出详细的头文件代码:
#ifndef CAFFE_IMAGE_SCALE_LAYER_HPP_
#define CAFFE_IMAGE_SCALE_LAYER_HPP_
#include "caffe/blob.hpp"
#include "caffe/layer.hpp"
#include "caffe/proto/caffe.pb.h"
#include "caffe/layer.hpp"
namespace caffe {
// written by xizero00 2016/9/13
template <typename Dtype>
class ImageScaleLayer : public Layer<Dtype> {
public:
explicit ImageScaleLayer(const LayerParameter& param)
: Layer<Dtype>(param) {}
virtual void LayerSetUp(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top);
virtual void Reshape(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top);
virtual inline const char* type() const { return "ImageScale"; }
virtual inline int ExactNumBottomBlobs() const { return 1; }
virtual inline int ExactNumTopBlobs() const { return 1; }
protected:
/// @copydoc ImageScaleLayer
virtual void Forward_cpu(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top);
virtual void Backward_cpu(const vector<Blob<Dtype>*>& top,
const vector<bool>& propagate_down, const vector<Blob<Dtype>*>& bottom) {};
int out_height_;
int out_width_;
int height_;
int width_;
bool visualize_;
int num_images_;
int num_channels_;
};
} // namespace caffe
#endif // CAFFE_IMAGE_SCALE_LAYER_HPP_
接下来写具体的层的设置以及层的前传的实现:
(8)加入必要的头文件
#include "caffe/layers/image_scale_layer.hpp"
#include "caffe/util/math_functions.hpp"
#include <opencv2/opencv.hpp>
(9)实现层的设置函数
LayerSetUp,在该函数中将网络的配置参数读取到类中的成员变量中,便于前传的时候以及对层进行设置的时候使用,并且检查参数的合法性
template <typename Dtype>
void ImageScaleLayer<Dtype>::LayerSetUp(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
// get parameters
const ImageScaleParameter& param = this->layer_param_.image_scale_param();
// get the output size
out_height_ = param.out_height();
out_width_ = param.out_width();
visualize_ = param.visualize();
// get the input size
num_images_ = bottom[0]->num();
height_ = bottom[0]->height();
width_ = bottom[0]->width();
num_channels_ = bottom[0]->channels();
// check the channels must be images
// channel must be 1 or 3, gray image or color image
CHECK_EQ( (num_channels_==3) || (num_channels_ == 1), true);
// check the output size
CHECK_GT(out_height_, 0);
CHECK_GT(out_height_, 0);
}
(10)实现层的Reshape函数,来设定该层的输出的大小,我们使用从网络配置文件中的参数类设置输出的大小
template <typename Dtype>
void ImageScaleLayer<Dtype>::Reshape(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
// reshape the outputs
top[0]->Reshape(num_images_, num_channels_, out_height_, out_width_);
}
(11)实现前向传播函数
Forward_cpu,我实现的就是将图像一幅一幅地进行缩放到配置文件中所给的大小。
template <typename Dtype>
void ImageScaleLayer<Dtype>::Forward_cpu(
const vector<Blob<Dtype>*>& bottom, const vector<Blob<Dtype>*>& top) {
const Dtype* bottom_data = bottom[0]->cpu_data();
Dtype * top_data = top[0]->mutable_cpu_data();
cv::Mat srcimage, dstimage;
// precompurte the index
const int srcimagesize = width_ * height_;
const int dstimagesize = out_width_ * out_height_;
const int srcchimagesize = srcimagesize * num_channels_;
const int dstchimagesize = dstimagesize * num_channels_;
for ( int idx_img = 0; idx_img < num_images_; idx_img++ )
{
// zeros source images and scaled images
srcimage = cv::Mat::zeros(height_, width_, CV_32FC1);
dstimage = cv::Mat::zeros(out_height_, out_width_, CV_32FC1);
// read from bottom[0]
for ( int idx_ch = 0; idx_ch < num_channels_; idx_ch++ )
{
for (int i = 0; i < height_; i++)
{
for ( int j=0; j < width_; j++ )
{
int image_idx = idx_img * srcchimagesize + srcimagesize * idx_ch + height_ *i + j;
srcimage.at<float>(i,j) = (float)bottom_data[image_idx];
}
}
}
// resize to specified size
// here we use linear interpolation
cv::resize(srcimage, dstimage, dstimage.size());
// store the resized image to top[0]
for (int idx_ch = 0; idx_ch < num_channels_; idx_ch++)
{
for (int i = 0; i < out_height_; i++)
{
for (int j = 0; j < out_width_; j++)
{
int image_idx = idx_img * dstchimagesize + dstimagesize * idx_ch + out_height_*i + j;
top_data[image_idx] = dstimage.at<float>(i,j);
}
}
}
if (visualize_)
{
cv::namedWindow("src image", CV_WINDOW_AUTOSIZE);
cv::namedWindow("dst image", CV_WINDOW_AUTOSIZE);
cv::imshow("src image", srcimage);
cv::imshow("dst image", dstimage);
cv::waitKey(0);
}
}
}
最后给出完整的实现:
#include "caffe/layers/image_scale_layer.hpp"
#include "caffe/util/math_functions.hpp"
#include <opencv2/opencv.hpp>
namespace caffe {
template <typename Dtype>
void ImageScaleLayer<Dtype>::LayerSetUp(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
// get parameters
const ImageScaleParameter& param = this->layer_param_.image_scale_param();
// get the output size
out_height_ = param.out_height();
out_width_ = param.out_width();
visualize_ = param.visualize();
// get the input size
num_images_ = bottom[0]->num();
height_ = bottom[0]->height();
width_ = bottom[0]->width();
num_channels_ = bottom[0]->channels();
// check the channels must be images
// channel must be 1 or 3, gray image or color image
CHECK_EQ( (num_channels_==3) || (num_channels_ == 1), true);
// check the output size
CHECK_GT(out_height_, 0);
CHECK_GT(out_height_, 0);
}
template <typename Dtype>
void ImageScaleLayer<Dtype>::Reshape(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
// reshape the outputs
top[0]->Reshape(num_images_, num_channels_, out_height_, out_width_);
}
template <typename Dtype>
void ImageScaleLayer<Dtype>::Forward_cpu(
const vector<Blob<Dtype>*>& bottom, const vector<Blob<Dtype>*>& top) {
const Dtype* bottom_data = bottom[0]->cpu_data();
Dtype * top_data = top[0]->mutable_cpu_data();
cv::Mat srcimage, dstimage;
// precompurte the index
const int srcimagesize = width_ * height_;
const int dstimagesize = out_width_ * out_height_;
const int srcchimagesize = srcimagesize * num_channels_;
const int dstchimagesize = dstimagesize * num_channels_;
for ( int idx_img = 0; idx_img < num_images_; idx_img++ )
{
// zeros source images and scaled images
srcimage = cv::Mat::zeros(height_, width_, CV_32FC1);
dstimage = cv::Mat::zeros(out_height_, out_width_, CV_32FC1);
// read from bottom[0]
for ( int idx_ch = 0; idx_ch < num_channels_; idx_ch++ )
{
for (int i = 0; i < height_; i++)
{
for ( int j=0; j < width_; j++ )
{
int image_idx = idx_img * srcchimagesize + srcimagesize * idx_ch + height_ *i + j;
srcimage.at<float>(i,j) = (float)bottom_data[image_idx];
}
}
}
// resize to specified size
// here we use linear interpolation
cv::resize(srcimage, dstimage, dstimage.size());
// store the resized image to top[0]
for (int idx_ch = 0; idx_ch < num_channels_; idx_ch++)
{
for (int i = 0; i < out_height_; i++)
{
for (int j = 0; j < out_width_; j++)
{
int image_idx = idx_img * dstchimagesize + dstimagesize * idx_ch + out_height_*i + j;
top_data[image_idx] = dstimage.at<float>(i,j);
}
}
}
if (visualize_)
{
cv::namedWindow("src image", CV_WINDOW_AUTOSIZE);
cv::namedWindow("dst image", CV_WINDOW_AUTOSIZE);
cv::imshow("src image", srcimage);
cv::imshow("dst image", dstimage);
cv::waitKey(0);
}
}
}
#ifdef CPU_ONLY
STUB_GPU(ImageScaleLayer);
#endif
INSTANTIATE_CLASS(ImageScaleLayer);
REGISTER_LAYER_CLASS(ImageScale);
} // namespace caffe
请把上述代码,保存为image_scale_layer.hpp和cpp。然后放入到对应的include和src/caffe/layers文件夹中。
那么在使用的时候可以进行如下配置
layer {
name: "imagescaled"
type: "ImageScale"
bottom: "data"
top: "imagescaled"
image_scale_param {
out_height: 128
out_width: 128
visualize: true
}
}
上述配置中
out_height和out_width就是经过缩放之后的图片的大小,而visualize表明是否显示的意思。
至此,我们就完成了一个很简单的caffe自定义层的实现,怎么样,很简单吧?
我测试的模型(我想你肯定知道怎么用caffe所听的工具将mnist数据集转换为lmdb吧)是:
# Simple single-layer network to showcase editing model parameters.
name: "sample"
layer {
name: "data"
type: "Data"
top: "data"
include {
phase: TRAIN
}
transform_param {
scale: 0.0039215684
}
data_param {
source: "examples/mnist/mnist_train_lmdb"
batch_size: 10
backend: LMDB
}
}
layer {
name: "imagescaled"
type: "ImageScale"
bottom: "data"
top: "imagescaled"
image_scale_param {
out_height: 128
out_width: 128
visualize: true
}
}
测试所用的solver.prototxt
net: "examples/imagescale/sample.prototxt"
base_lr: 0.01
lr_policy: "step"
gamma: 0.1
stepsize: 10000
display: 1
max_iter: 1
weight_decay: 0.0005
snapshot: 1
snapshot_prefix: "examples/imagescale/sample"
momentum: 0.9
# solver mode: CPU or GPU
solver_mode: GPU
然后运行的时候仅仅需要写个bash文件到caffe的目录:
#!/usr/bin/env sh
set -e
snap_dir="examples/imagescale/snapshots"
mkdir -p $snap_dir
TOOLS=./build/tools
$TOOLS/caffe train \
--solver=examples/imagescale/solver.prototxt 2>&1 | tee -a $snap_dir/train.log
下面给出我的结果:
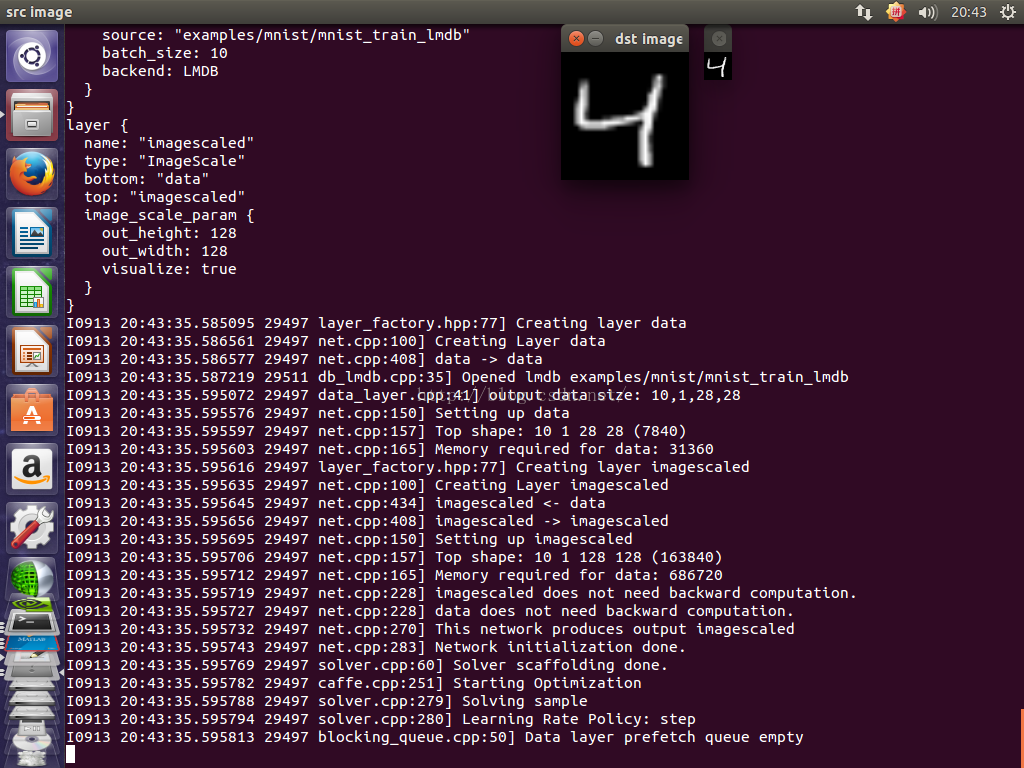
小的是输入的原始图像,大的是经过缩放之后的图像。
好了,到此结束。
代码打包下载,请戳这里
http://download.csdn.net/detail/xizero00/9629898


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









