







图论理论基础
图的基本概念
二维坐标中,两点可以连成线,多个点连成的线就构成了图。
当然图也可以就一个节点,甚至没有节点(空图)
图的种类
整体上一般分为 有向图 和 无向图。
有向图是指 图中边是有方向的:
无向图是指 图中边没有方向:
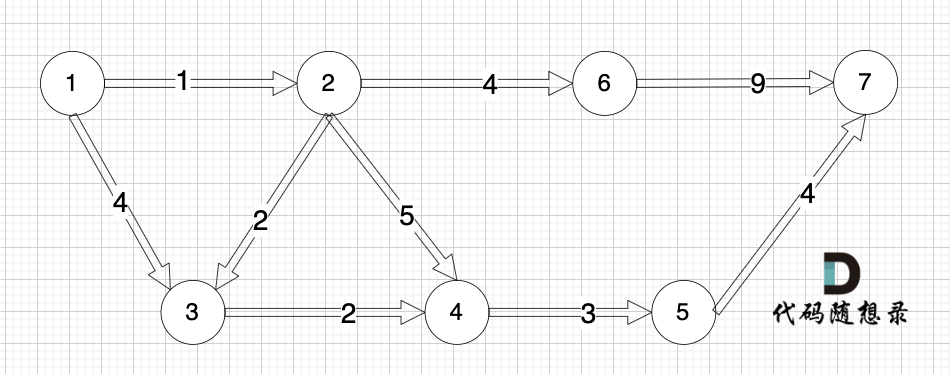
加权有向图,就是图中边是有权值的,例如:
加权无向图也是同理。
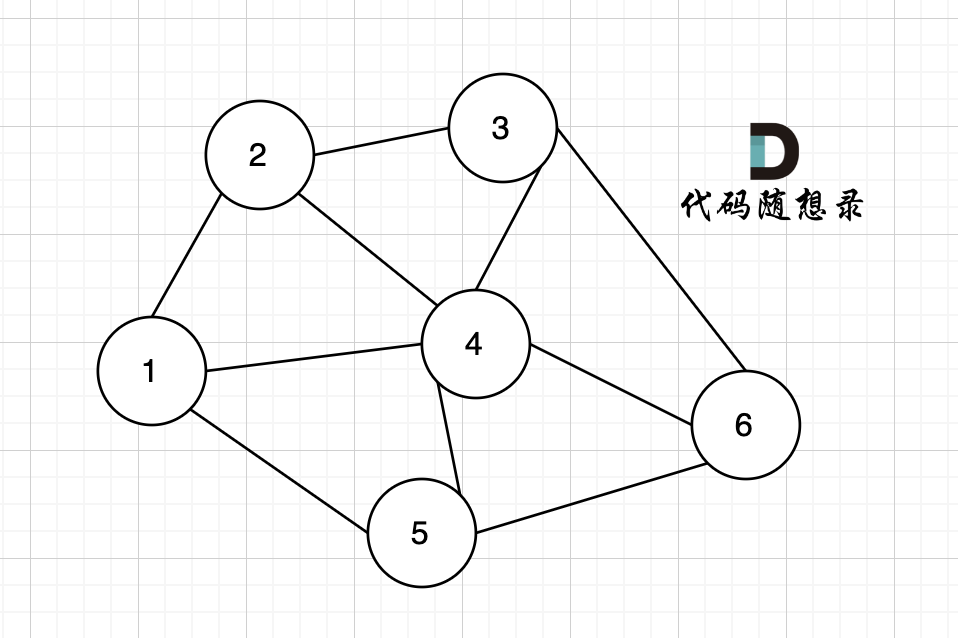
度
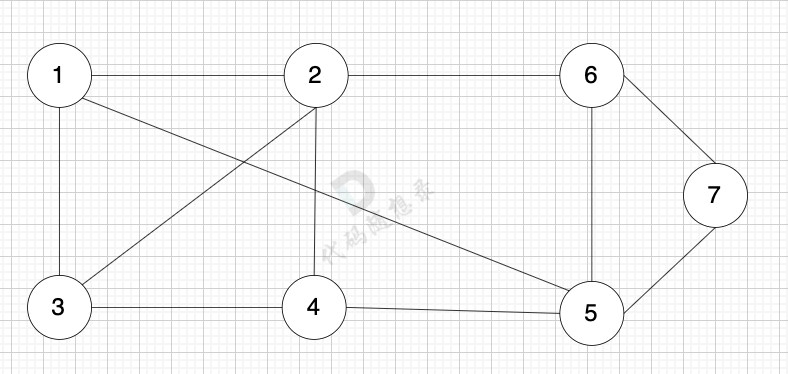
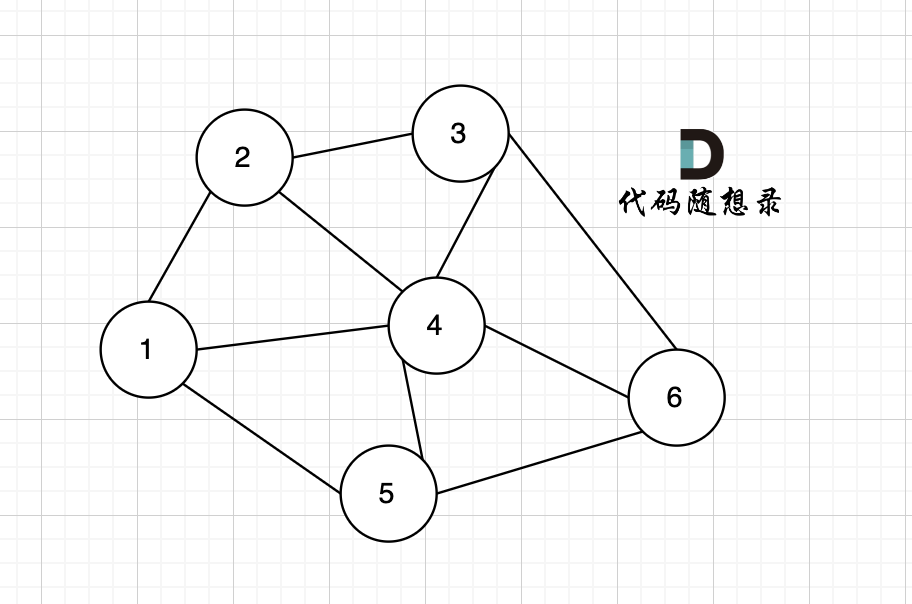
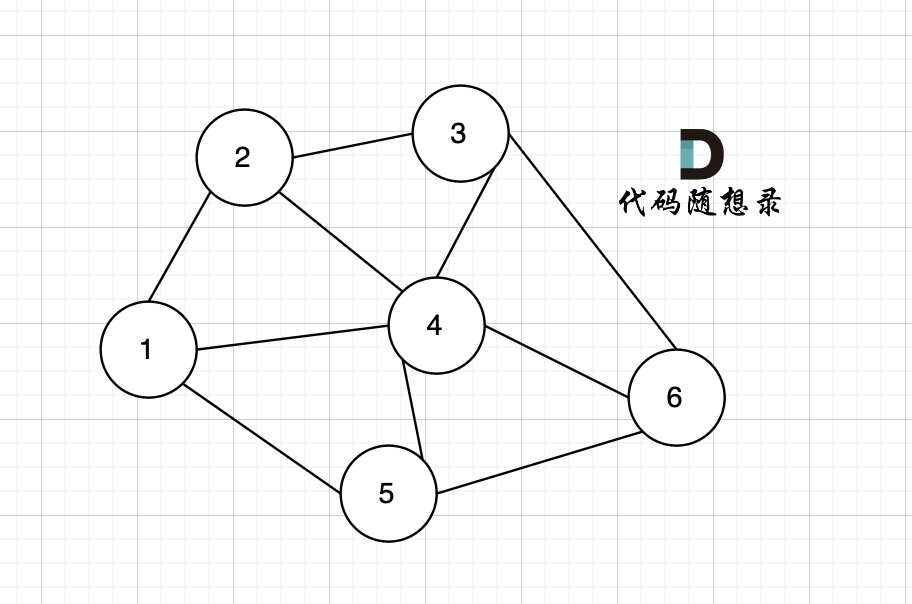
无向图中有几条边连接该节点,该节点就有几度。
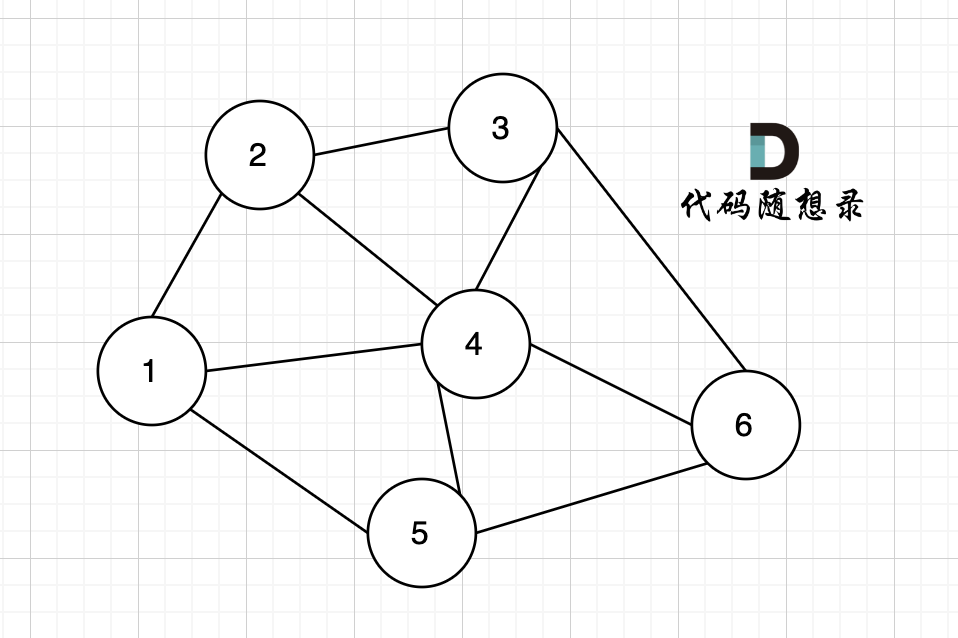
例如,该无向图中,节点4的度为5,节点6的度为3。
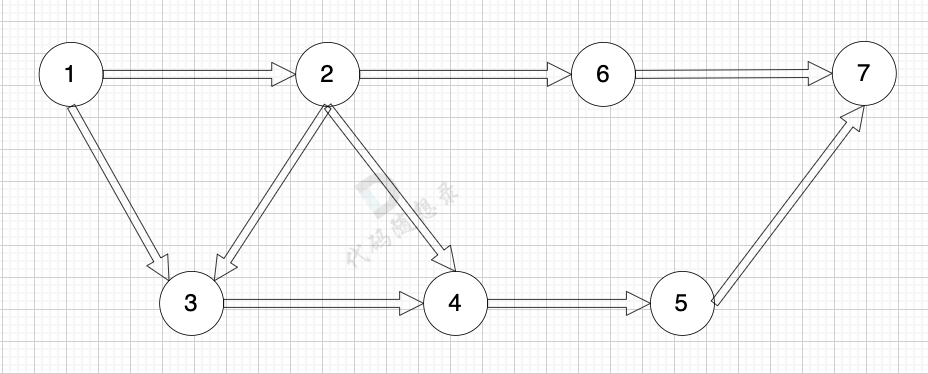
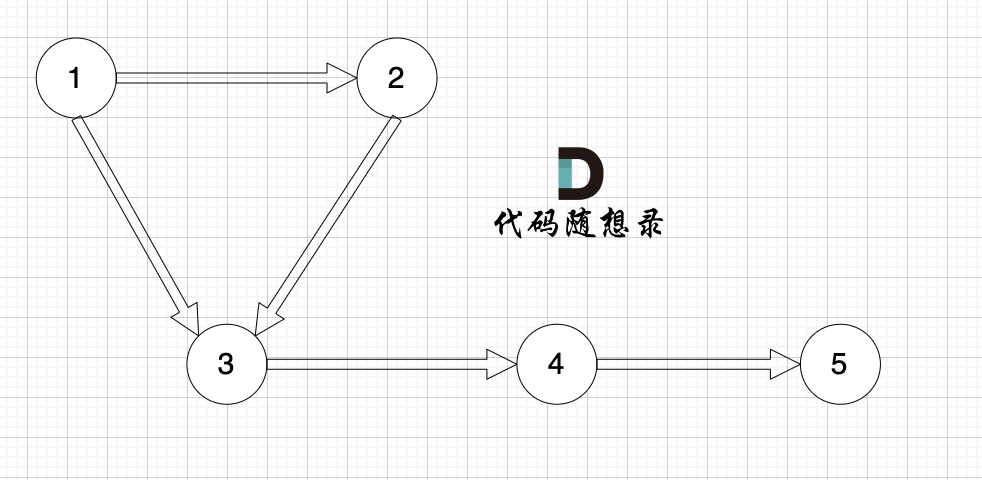
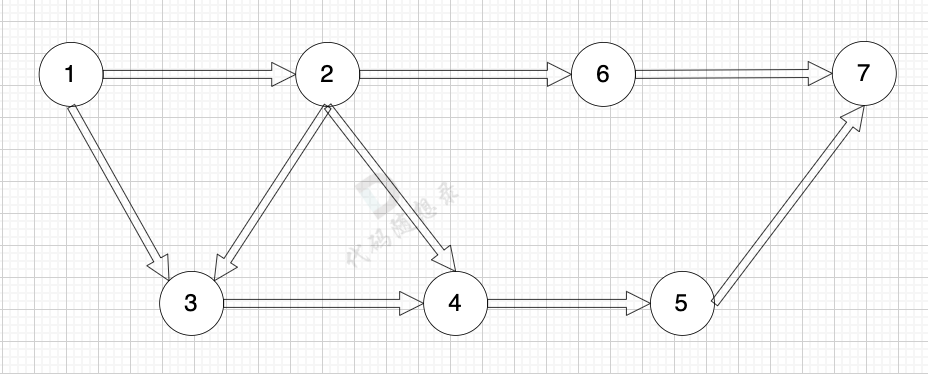
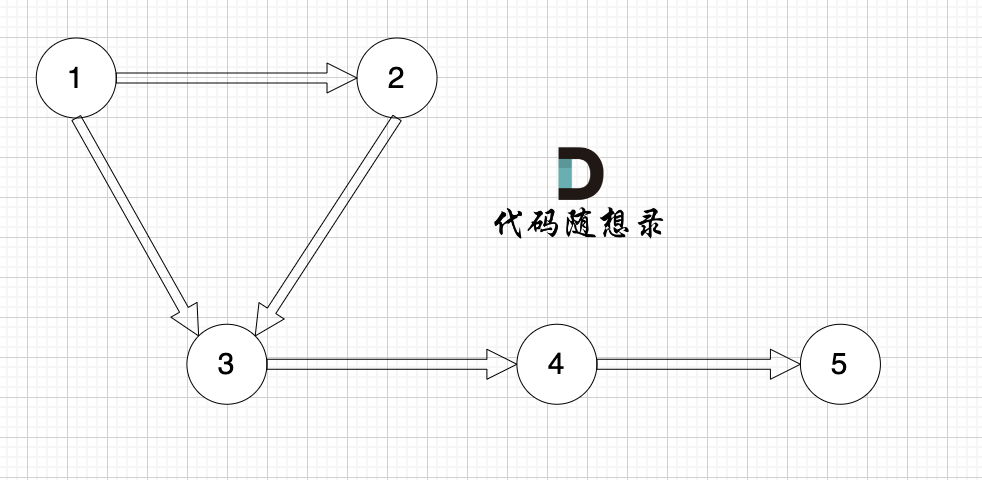
在有向图中,每个节点有出度和入度。
出度:从该节点出发的边的个数。
入度:指向该节点边的个数。
例如,该有向图中,节点3的入度为2,出度为1,节点1的入度为0,出度为2。
连通性
在图中表示节点的连通情况,我们称之为连通性。
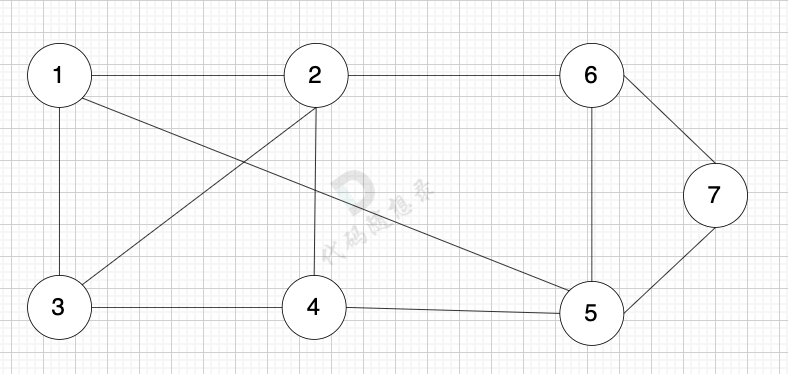
连通图
在无向图中,任何两个节点都是可以到达的,我们称之为连通图 ,如图:
如果有节点不能到达其他节点,则为非连通图,如图:
节点1 不能到达节点4。
强连通图
在有向图中,任何两个节点是可以相互到达的,我们称之为 强连通图。
这里有人可能想,这和无向图中的连通图有什么区别,不是一样的吗?
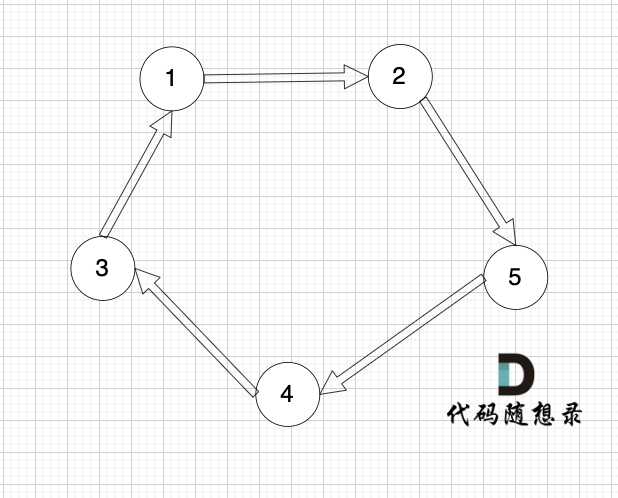
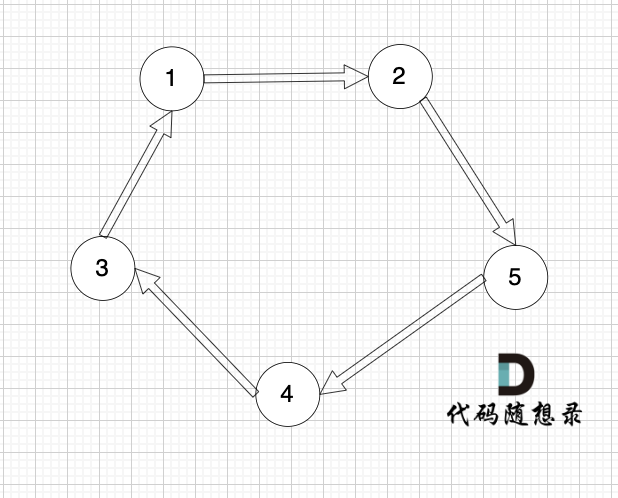
我们来看这个有向图:
这个图是强连通图吗?
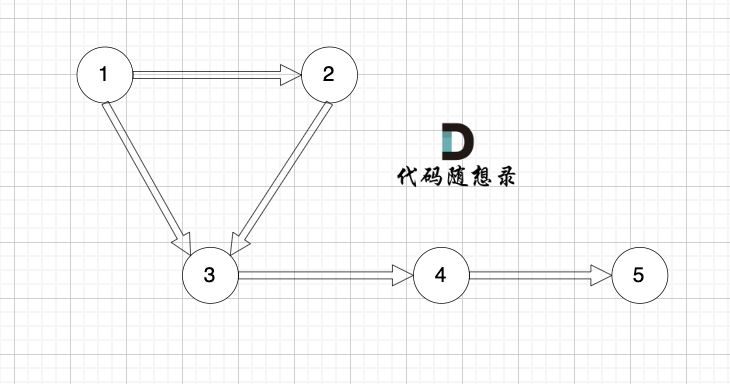
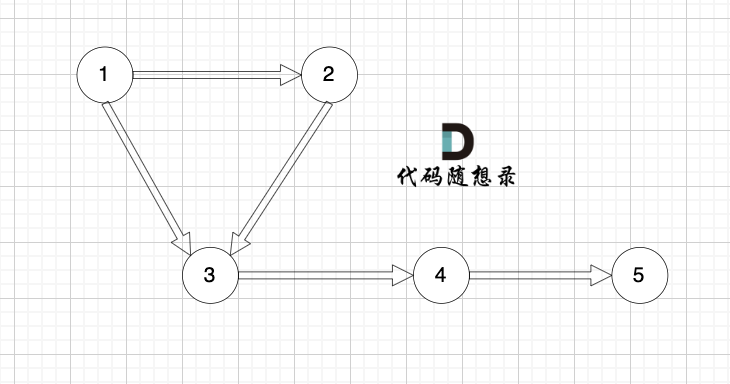
初步一看,好像这节点都连着呢,但这不是强连通图,节点1 可以到节点5,但节点5 不能到 节点1 。
强连通图是在有向图中任何两个节点是可以相互到达
下面这个有向图才是强连通图:
连通分量
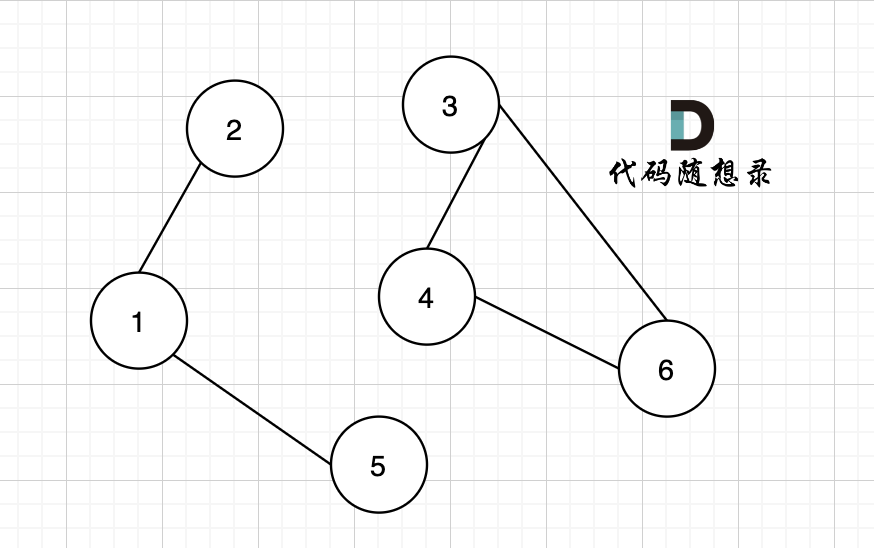
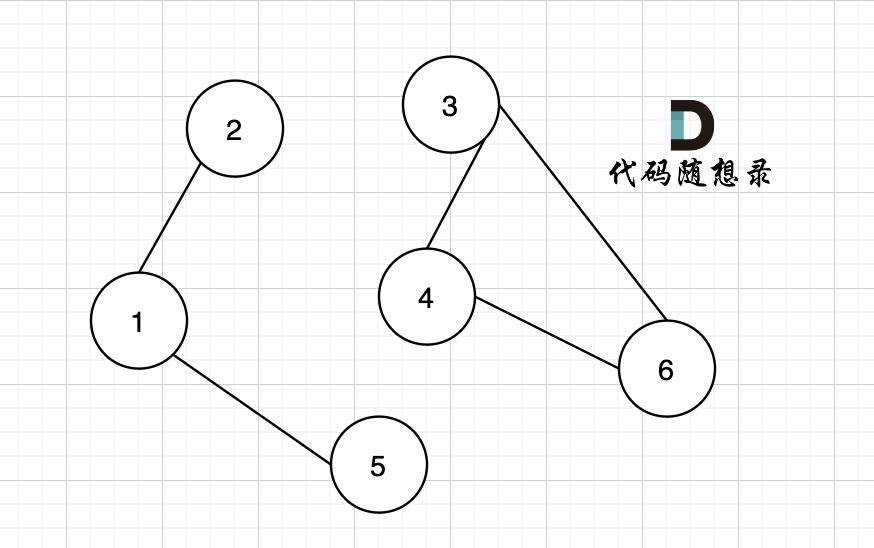
在无向图中的极大连通子图称之为该图的一个连通分量。
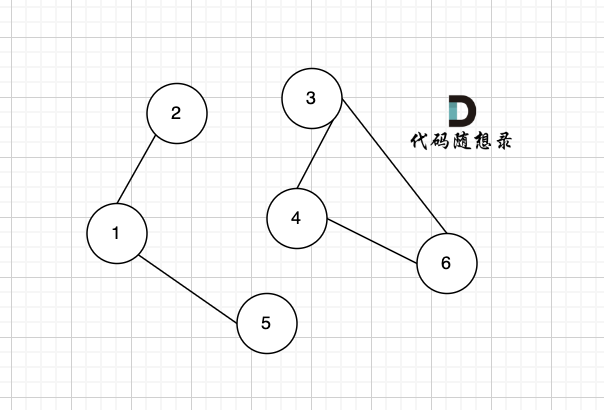
只看概念大家可能不理解,我来画个图:
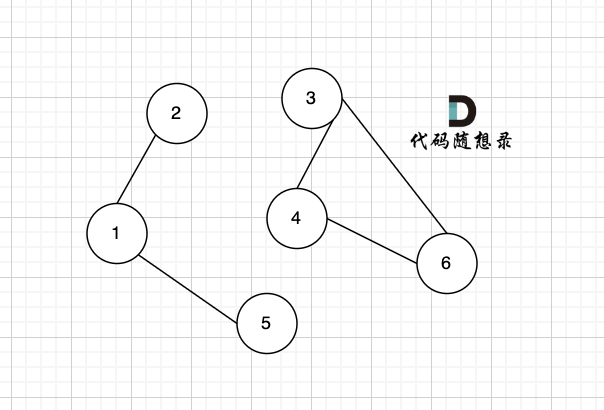
该无向图中 节点1、节点2、节点5 构成的子图就是 该无向图中的一个连通分量,该子图所有节点都是相互可达到的。
同理,节点3、节点4、节点6 构成的子图 也是该无向图中的一个连通分量。
那么无向图中 节点3 、节点4 构成的子图 是该无向图的联通分量吗?
不是!
因为必须是极大联通子图才能是连通分量,所以 必须是节点3、节点4、节点6 构成的子图才是连通分量。
在图论中,连通分量是一个很重要的概念,例如岛屿问题(后面章节会有专门讲解)其实就是求连通分量。
强连通分量
在有向图中极大强连通子图称之为该图的强连通分量。
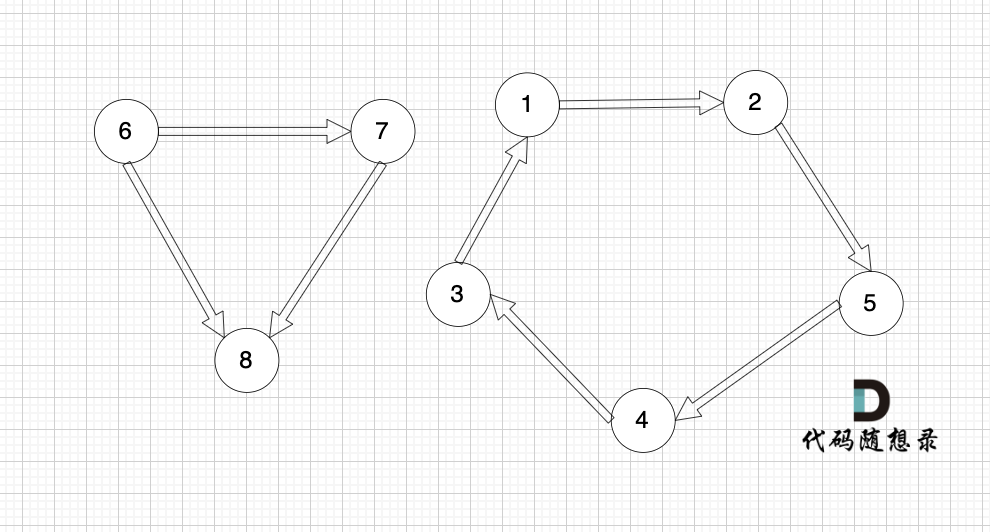
如图:
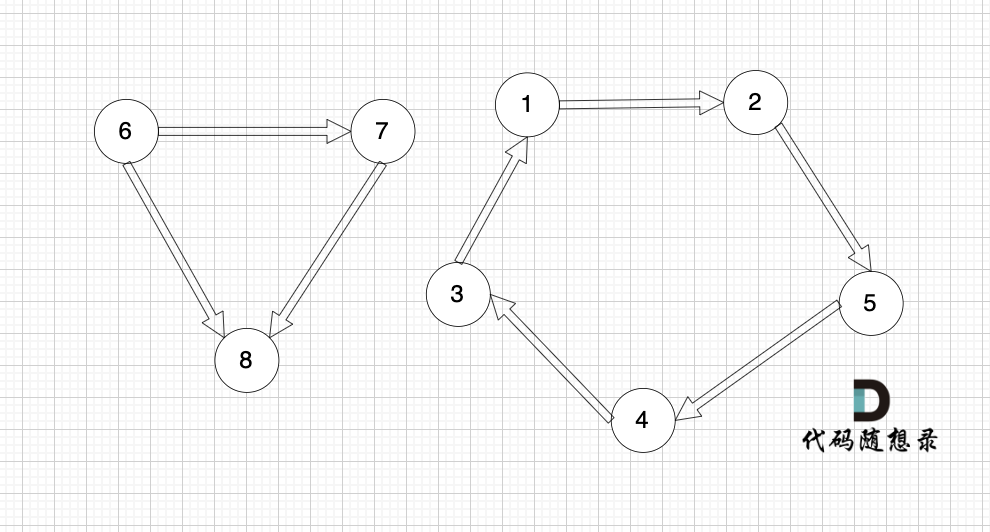
节点1、节点2、节点3、节点4、节点5 构成的子图是强连通分量,因为这是强连通图,也是极大图。
节点6、节点7、节点8 构成的子图 不是强连通分量,因为这不是强连通图,节点8 不能达到节点6。
节点1、节点2、节点5 构成的子图 也不是 强连通分量,因为这不是极大图。
图的构造
我们如何用代码来表示一个图呢?
一般使用邻接表、邻接矩阵 或者用类来表示。
主要是 朴素存储、邻接表和邻接矩阵。
邻接矩阵
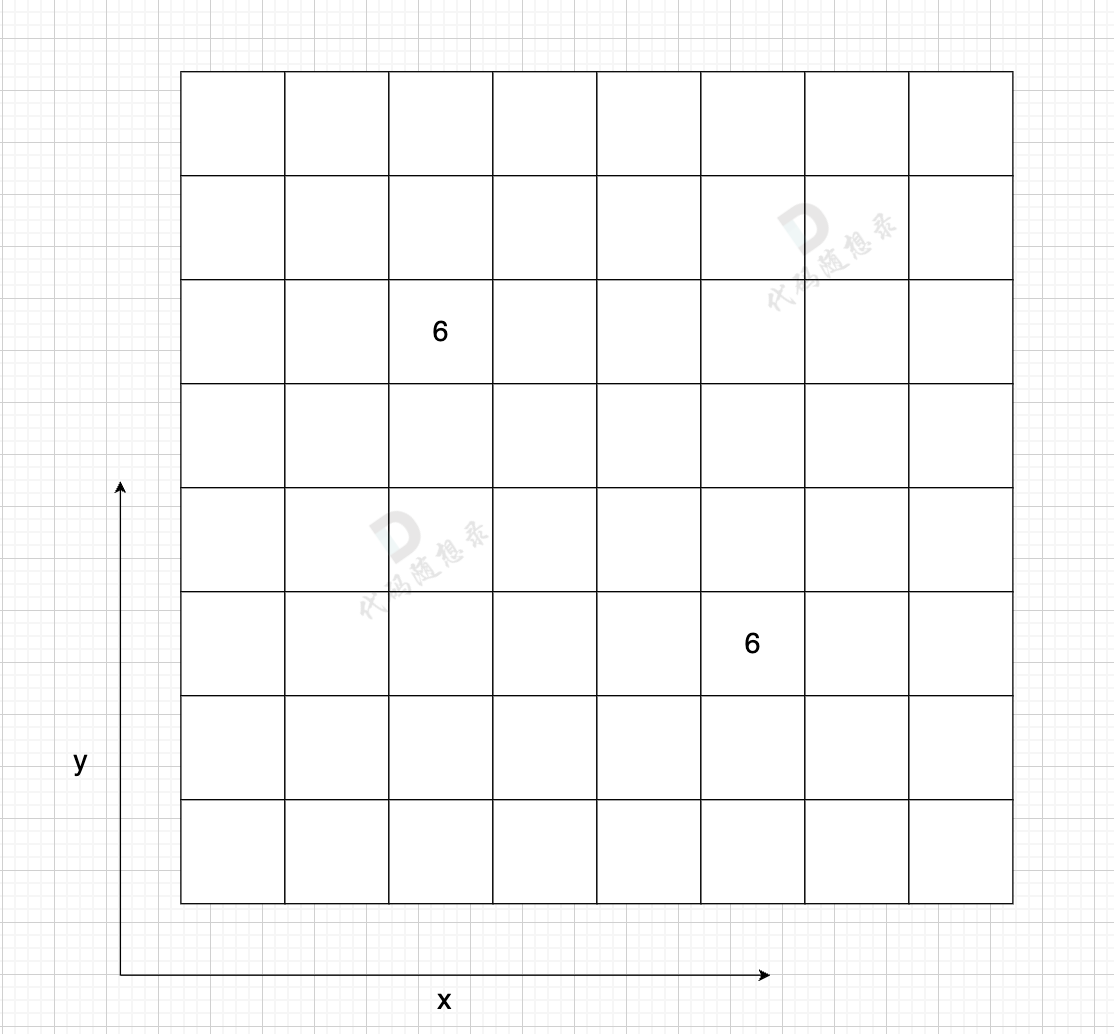
邻接矩阵 使用 二维数组来表示图结构。 邻接矩阵是从节点的角度来表示图,有多少节点就申请多大的二维数组。
例如: grid[2][5] = 6,表示 节点 2 连接 节点5 为有向图,节点2 指向 节点5,边的权值为6。
如果想表示无向图,即:grid[2][5] = 6,grid[5][2] = 6,表示节点2 与 节点5 相互连通,权值为6。
如图:
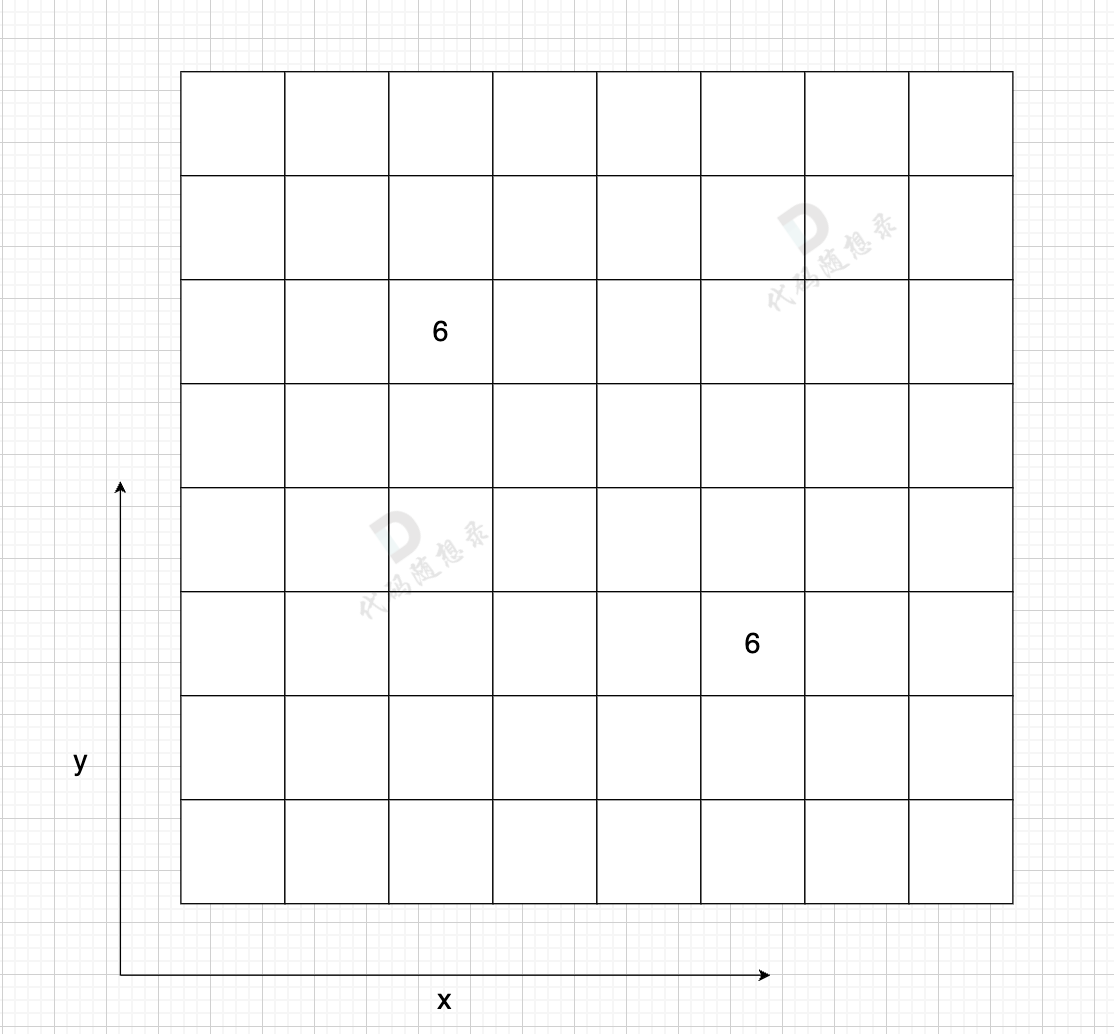
在一个 n (节点数)为8 的图中,就需要申请 8 * 8 这么大的空间。
图中有一条双向边,即:grid[2][5] = 6,grid[5][2] = 6
这种表达方式(邻接矩阵) 在 边少,节点多的情况下,会导致申请过大的二维数组,造成空间浪费。
而且在寻找节点连接情况的时候,需要遍历整个矩阵,即 n * n 的时间复杂度,同样造成时间浪费。
邻接矩阵的优点:
- 表达方式简单,易于理解
- 检查任意两个顶点间是否存在边的操作非常快
- 适合稠密图,在边数接近顶点数平方的图中,邻接矩阵是一种空间效率较高的表示方法。
缺点:
- 遇到稀疏图,会导致申请过大的二维数组造成空间浪费 且遍历 边 的时候需要遍历整个n * n矩阵,造成时间浪费
邻接表
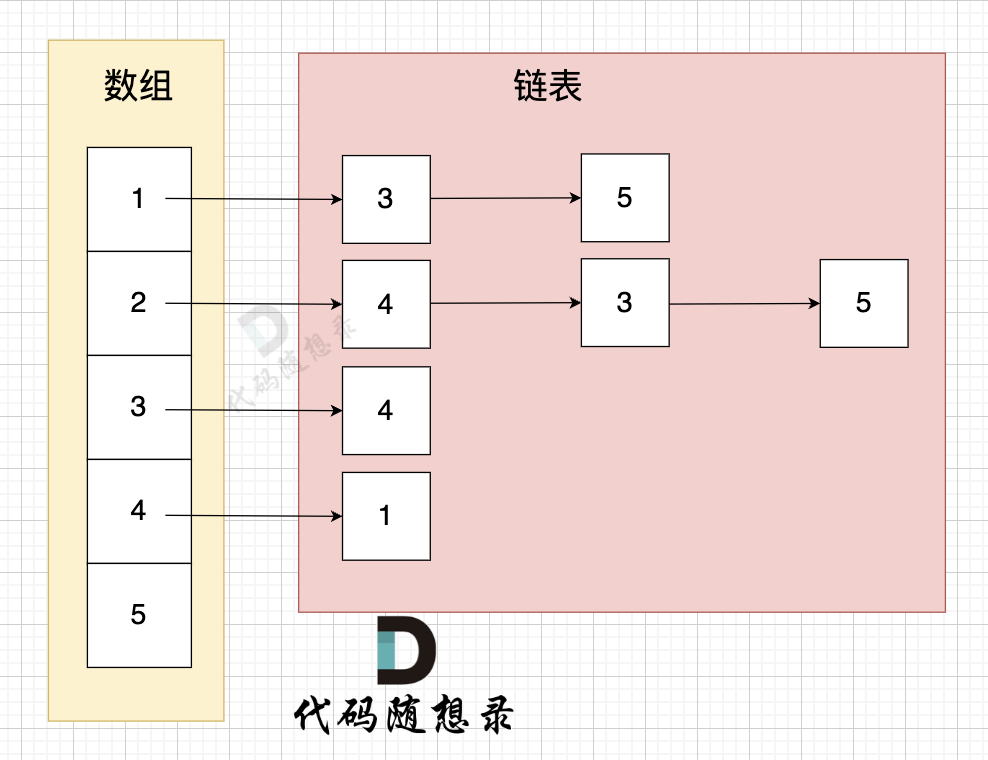
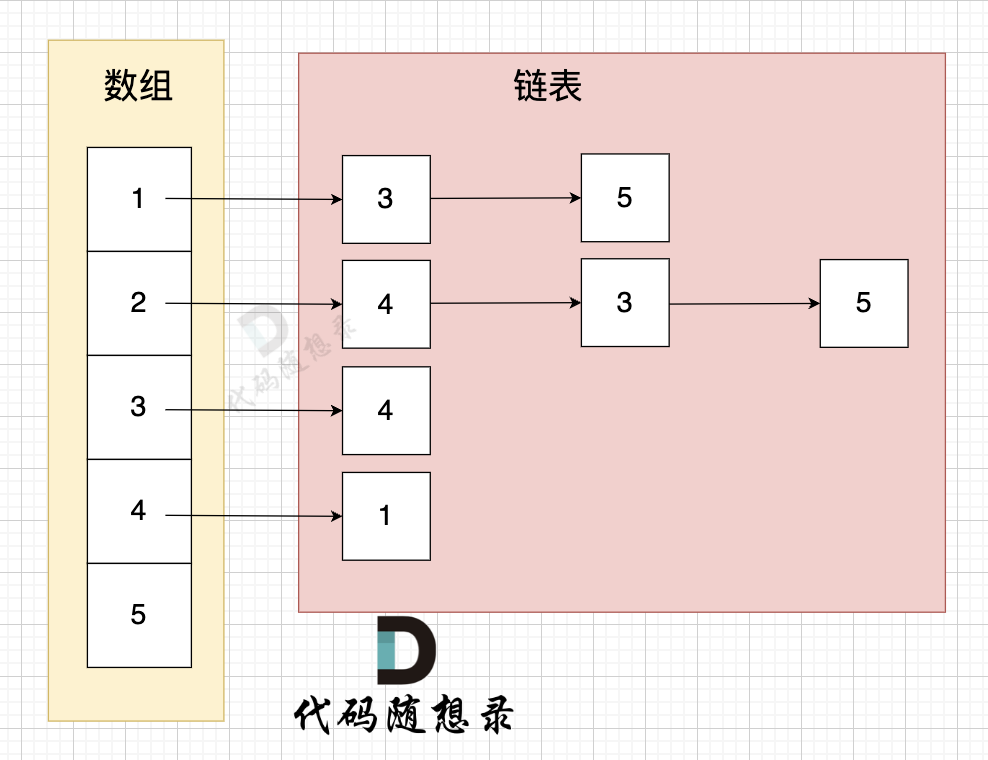
邻接表 使用 数组 + 链表的方式来表示。 邻接表是从边的数量来表示图,有多少边 才会申请对应大小的链表。
邻接表的构造如图:
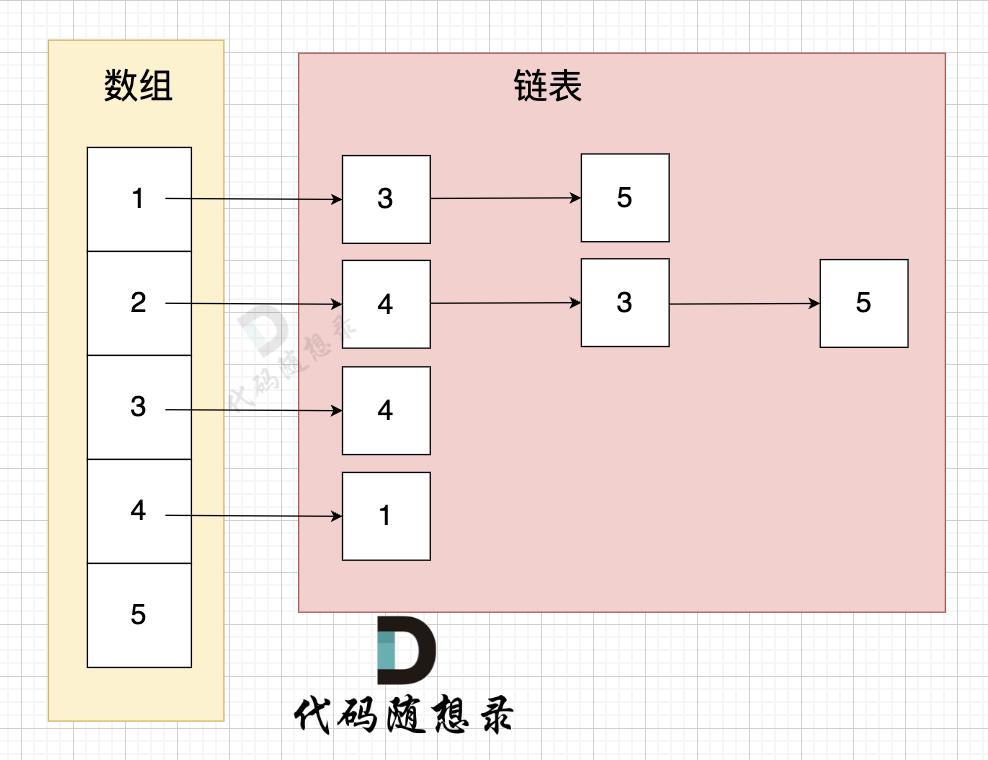
这里表达的图是:
- 节点1 指向 节点3 和 节点5
- 节点2 指向 节点4、节点3、节点5
- 节点3 指向 节点4
- 节点4指向节点1
有多少边 邻接表才会申请多少个对应的链表节点。
从图中可以直观看出 使用 数组 + 链表 来表达 边的连接情况 。
邻接表的优点:
- 对于稀疏图的存储,只需要存储边,空间利用率高
- 遍历节点连接情况相对容易
缺点:
- 检查任意两个节点间是否存在边,效率相对低,需要 O(V)时间,V表示某节点连接其他节点的数量。
- 实现相对复杂,不易理解
以上大家可能理解比较模糊,没关系,因为大家还没做过图论的题目,对于图的表达没有概念。
这里我先不给出具体的实现代码,大家先有个初步印象,在后面算法题实战中,我还会讲到具体代码实现,等带大家做算法题,写了代码之后,自然就理解了。
图的遍历方式
图的遍历方式基本是两大类:
- 深度优先搜索(dfs)
- 广度优先搜索(bfs)
在讲解二叉树章节的时候,其实就已经讲过这两种遍历方式。
二叉树的递归遍历,是dfs 在二叉树上的遍历方式。
二叉树的层序遍历,是bfs 在二叉树上的遍历方式。
dfs 和 bfs 一种搜索算法,可以在不同的数据结构上进行搜索,在二叉树章节里是在二叉树这样的数据结构上搜索。
而在图论章节,则是在图(邻接表或邻接矩阵)上进行搜索。
图论理论基础
图的基本概念
二维坐标中,两点可以连成线,多个点连成的线就构成了图。
当然图也可以就一个节点,甚至没有节点(空图)
图的种类
整体上一般分为 有向图 和 无向图。
有向图是指 图中边是有方向的:
无向图是指 图中边没有方向:
加权有向图,就是图中边是有权值的,例如:

加权无向图也是同理。
度
无向图中有几条边连接该节点,该节点就有几度。
例如,该无向图中,节点4的度为5,节点6的度为3。
在有向图中,每个节点有出度和入度。
出度:从该节点出发的边的个数。
入度:指向该节点边的个数。
例如,该有向图中,节点3的入度为2,出度为1,节点1的入度为0,出度为2。
连通性
在图中表示节点的连通情况,我们称之为连通性。
连通图
在无向图中,任何两个节点都是可以到达的,我们称之为连通图 ,如图:
如果有节点不能到达其他节点,则为非连通图,如图:
节点1 不能到达节点4。
强连通图
在有向图中,任何两个节点是可以相互到达的,我们称之为 强连通图。
这里有人可能想,这和无向图中的连通图有什么区别,不是一样的吗?
我们来看这个有向图:
这个图是强连通图吗?
初步一看,好像这节点都连着呢,但这不是强连通图,节点1 可以到节点5,但节点5 不能到 节点1 。
强连通图是在有向图中任何两个节点是可以相互到达
下面这个有向图才是强连通图:
连通分量
在无向图中的极大连通子图称之为该图的一个连通分量。
只看概念大家可能不理解,我来画个图:
该无向图中 节点1、节点2、节点5 构成的子图就是 该无向图中的一个连通分量,该子图所有节点都是相互可达到的。
同理,节点3、节点4、节点6 构成的子图 也是该无向图中的一个连通分量。
那么无向图中 节点3 、节点4 构成的子图 是该无向图的联通分量吗?
不是!
因为必须是极大联通子图才能是连通分量,所以 必须是节点3、节点4、节点6 构成的子图才是连通分量。
在图论中,连通分量是一个很重要的概念,例如岛屿问题(后面章节会有专门讲解)其实就是求连通分量。
强连通分量
在有向图中极大强连通子图称之为该图的强连通分量。
如图:
节点1、节点2、节点3、节点4、节点5 构成的子图是强连通分量,因为这是强连通图,也是极大图。
节点6、节点7、节点8 构成的子图 不是强连通分量,因为这不是强连通图,节点8 不能达到节点6。
节点1、节点2、节点5 构成的子图 也不是 强连通分量,因为这不是极大图。
图的构造
我们如何用代码来表示一个图呢?
一般使用邻接表、邻接矩阵 或者用类来表示。
主要是 朴素存储、邻接表和邻接矩阵。
邻接矩阵
邻接矩阵 使用 二维数组来表示图结构。 邻接矩阵是从节点的角度来表示图,有多少节点就申请多大的二维数组。
例如: grid[2][5] = 6,表示 节点 2 连接 节点5 为有向图,节点2 指向 节点5,边的权值为6。
如果想表示无向图,即:grid[2][5] = 6,grid[5][2] = 6,表示节点2 与 节点5 相互连通,权值为6。
如图:
在一个 n (节点数)为8 的图中,就需要申请 8 * 8 这么大的空间。
图中有一条双向边,即:grid[2][5] = 6,grid[5][2] = 6
这种表达方式(邻接矩阵) 在 边少,节点多的情况下,会导致申请过大的二维数组,造成空间浪费。
而且在寻找节点连接情况的时候,需要遍历整个矩阵,即 n * n 的时间复杂度,同样造成时间浪费。
邻接矩阵的优点:
- 表达方式简单,易于理解
- 检查任意两个顶点间是否存在边的操作非常快
- 适合稠密图,在边数接近顶点数平方的图中,邻接矩阵是一种空间效率较高的表示方法。
缺点:
- 遇到稀疏图,会导致申请过大的二维数组造成空间浪费 且遍历 边 的时候需要遍历整个n * n矩阵,造成时间浪费
邻接表
邻接表 使用 数组 + 链表的方式来表示。 邻接表是从边的数量来表示图,有多少边 才会申请对应大小的链表。
邻接表的构造如图:
这里表达的图是:
- 节点1 指向 节点3 和 节点5
- 节点2 指向 节点4、节点3、节点5
- 节点3 指向 节点4
- 节点4指向节点1
有多少边 邻接表才会申请多少个对应的链表节点。
从图中可以直观看出 使用 数组 + 链表 来表达 边的连接情况 。
邻接表的优点:
- 对于稀疏图的存储,只需要存储边,空间利用率高
- 遍历节点连接情况相对容易
缺点:
- 检查任意两个节点间是否存在边,效率相对低,需要 O(V)时间,V表示某节点连接其他节点的数量。
- 实现相对复杂,不易理解
以上大家可能理解比较模糊,没关系,因为大家还没做过图论的题目,对于图的表达没有概念。
这里我先不给出具体的实现代码,大家先有个初步印象,在后面算法题实战中,我还会讲到具体代码实现,等带大家做算法题,写了代码之后,自然就理解了。
图的遍历方式
图的遍历方式基本是两大类:
- 深度优先搜索(dfs)
- 广度优先搜索(bfs)
在讲解二叉树章节的时候,其实就已经讲过这两种遍历方式。
二叉树的递归遍历,是dfs 在二叉树上的遍历方式。
二叉树的层序遍历,是bfs 在二叉树上的遍历方式。
dfs 和 bfs 一种搜索算法,可以在不同的数据结构上进行搜索,在二叉树章节里是在二叉树这样的数据结构上搜索。
而在图论章节,则是在图(邻接表或邻接矩阵)上进行搜索。
深度优先搜索理论基础
dfs 与 bfs 区别
提到深度优先搜索(dfs),就不得不说和广度优先搜索(bfs)有什么区别
先来了解dfs的过程,很多人可能对dfs(深度优先搜索),bfs(广度优先搜索)分不清。
先给大家说一下两者大概的区别:
- dfs是可一个方向去搜,不到黄河不回头,直到遇到绝境了,搜不下去了,再换方向(换方向的过程就涉及到了回溯)。
- bfs是先把本节点所连接的所有节点遍历一遍,走到下一个节点的时候,再把连接节点的所有节点遍历一遍,搜索方向更像是广度,四面八方的搜索过程。
当然以上讲的是,大体可以这么理解,接下来 我们详细讲解dfs,(bfs在用单独一篇文章详细讲解)
dfs 搜索过程
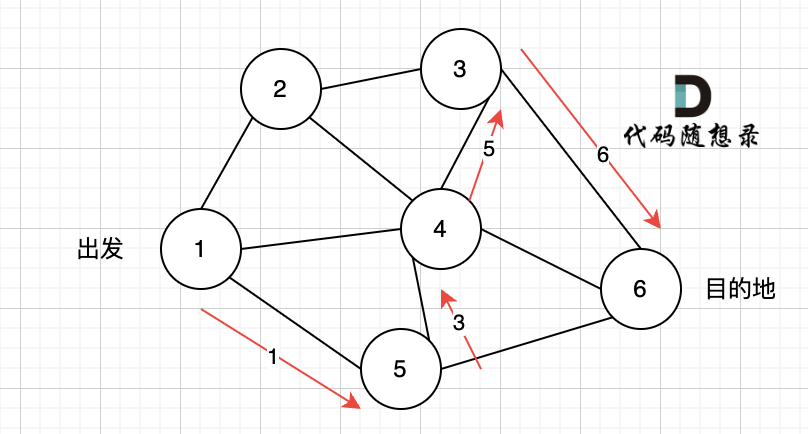
上面说道dfs是可一个方向搜,不到黄河不回头。 那么我们来举一个例子。
如图一,是一个无向图,我们要搜索从节点1到节点6的所有路径。
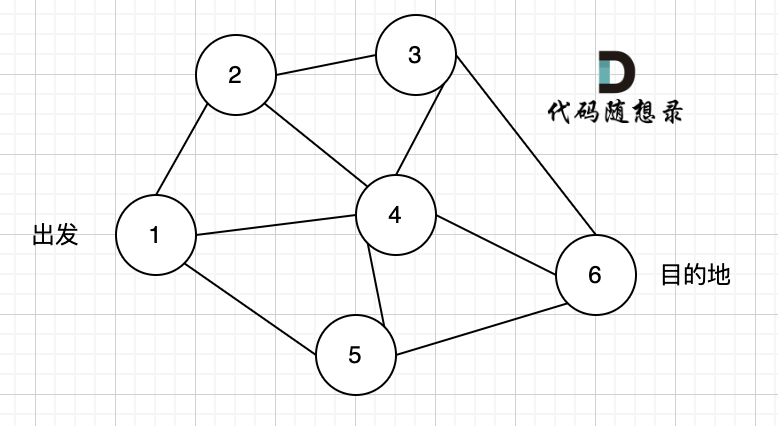
那么dfs搜索的第一条路径是这样的: (假设第一次延默认方向,就找到了节点6),图二
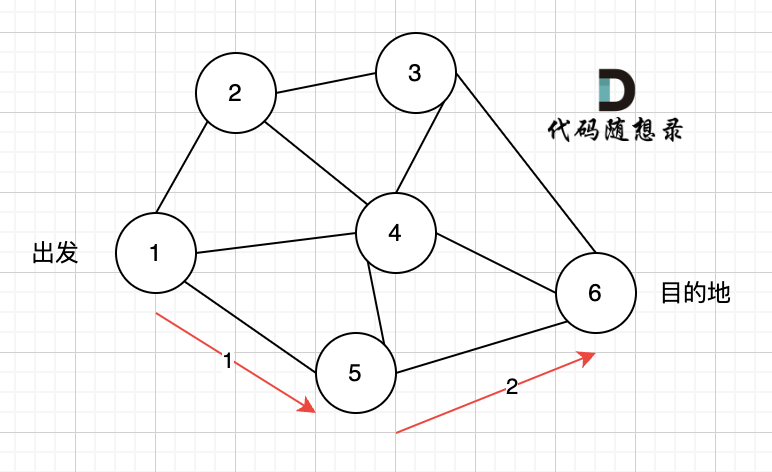
此时我们找到了节点6,(遇到黄河了,是不是应该回头了),那么应该再去搜索其他方向了。 如图三:
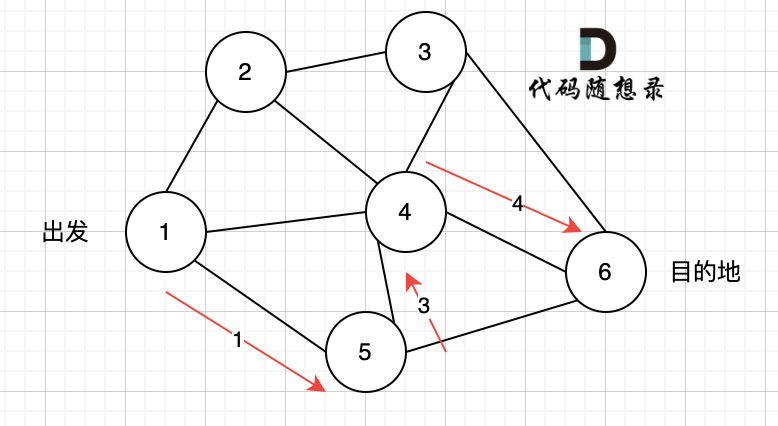
路径2撤销了,改变了方向,走路径3(红色线), 接着也找到终点6。 那么撤销路径2,改为路径3,在dfs中其实就是回溯的过程(这一点很重要,很多人不理解dfs代码中回溯是用来干什么的)
又找到了一条从节点1到节点6的路径,又到黄河了,此时再回头,下图图四中,路径4撤销(回溯的过程),改为路径5。
又找到了一条从节点1到节点6的路径,又到黄河了,此时再回头,下图图五,路径6撤销(回溯的过程),改为路径7,路径8 和 路径7,路径9, 结果发现死路一条,都走到了自己走过的节点。
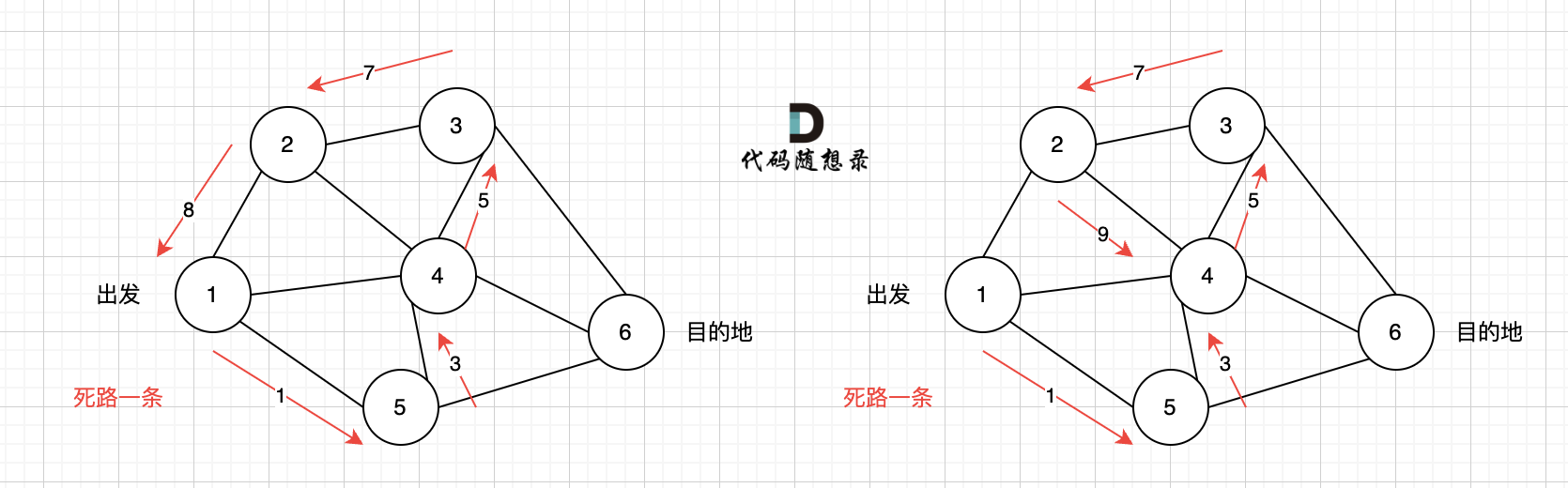
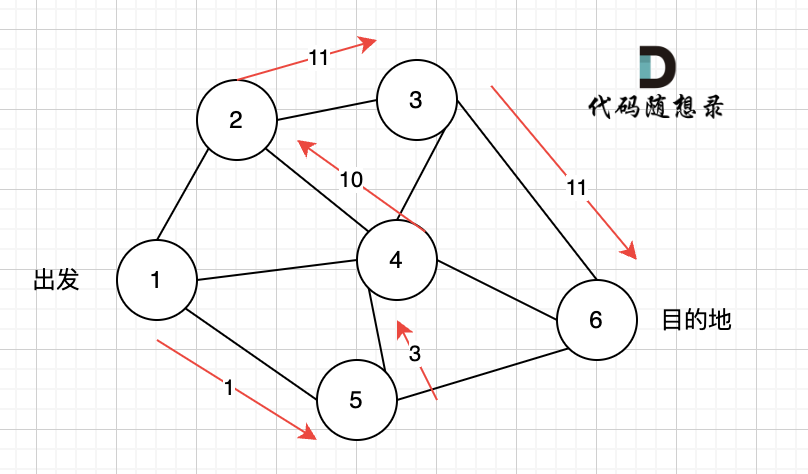
那么节点2所连接路径和节点3所链接的路径 都走过了,撤销路径只能向上回退,去选择撤销当初节点4的选择,也就是撤销路径5,改为路径10 。 如图图六:
上图演示中,其实我并没有把 所有的 从节点1 到节点6的dfs(深度优先搜索)的过程都画出来,那样太冗余了,但 已经把dfs 关键的地方都涉及到了,关键就两点:
- 搜索方向,是认准一个方向搜,直到碰壁之后再换方向
- 换方向是撤销原路径,改为节点链接的下一个路径,回溯的过程。
代码框架
如下代码:
void dfs(参数) {
处理节点
dfs(图,选择的节点); // 递归
回溯,撤销处理结果
}
可以看到回溯操作就在递归函数的下面,递归和回溯是相辅相成的。
所以dfs,bfs其实是基础搜索算法,也广泛应用与其他数据结构与算法中。
我们在回顾一下回溯法的代码框架:
void backtracking(参数) {
if (终止条件) {
存放结果;
return;
}
for (选择:本层集合中元素(树中节点孩子的数量就是集合的大小)) {
处理节点;
backtracking(路径,选择列表); // 递归
回溯,撤销处理结果
}
}
回溯算法,其实就是dfs的过程,这里给出dfs的代码框架:
void dfs(参数) {
if (终止条件) {
存放结果;
return;
}
for (选择:本节点所连接的其他节点) {
处理节点;
dfs(图,选择的节点); // 递归
回溯,撤销处理结果
}
}
可以发现dfs的代码框架和回溯算法的代码框架是差不多的。
下面我在用 深搜三部曲,来解读 dfs的代码框架。
深搜三部曲
深搜三部曲如下:
1、确认递归函数,参数
void dfs(参数)
通常我们递归的时候,我们递归搜索需要了解哪些参数,其实也可以在写递归函数的时候,发现需要什么参数,再去补充就可以。
一般情况,深搜需要 二维数组数组结构保存所有路径,需要一维数组保存单一路径,这种保存结果的数组,我们可以定义一个全局变量,避免让我们的函数参数过多。
例如这样:
vector<vector<int>> result; // 保存符合条件的所有路径
vector<int> path; // 起点到终点的路径
void dfs (图,目前搜索的节点)
2、确认终止条件
终止条件很重要,很多同学写dfs的时候,之所以容易死循环,栈溢出等等这些问题,都是因为终止条件没有想清楚。
if (终止条件) {
存放结果;
return;
}
终止添加不仅是结束本层递归,同时也是我们收获结果的时候。
另外,其实很多dfs写法,没有写终止条件,其实终止条件写在了, 下面dfs递归的逻辑里了,也就是不符合条件,直接不会向下递归。这里如果大家不理解的话,没关系,后面会有具体题目来讲解。
3、处理目前搜索节点出发的路径
一般这里就是一个for循环的操作,去遍历 目前搜索节点 所能到的所有节点。
for (选择:本节点所连接的其他节点) {
处理节点;
dfs(图,选择的节点); // 递归
回溯,撤销处理结果
}
不少人疑惑的地方,都是 dfs代码框架中for循环里分明已经处理节点了,那么 dfs函数下面 为什么还要撤销的呢。
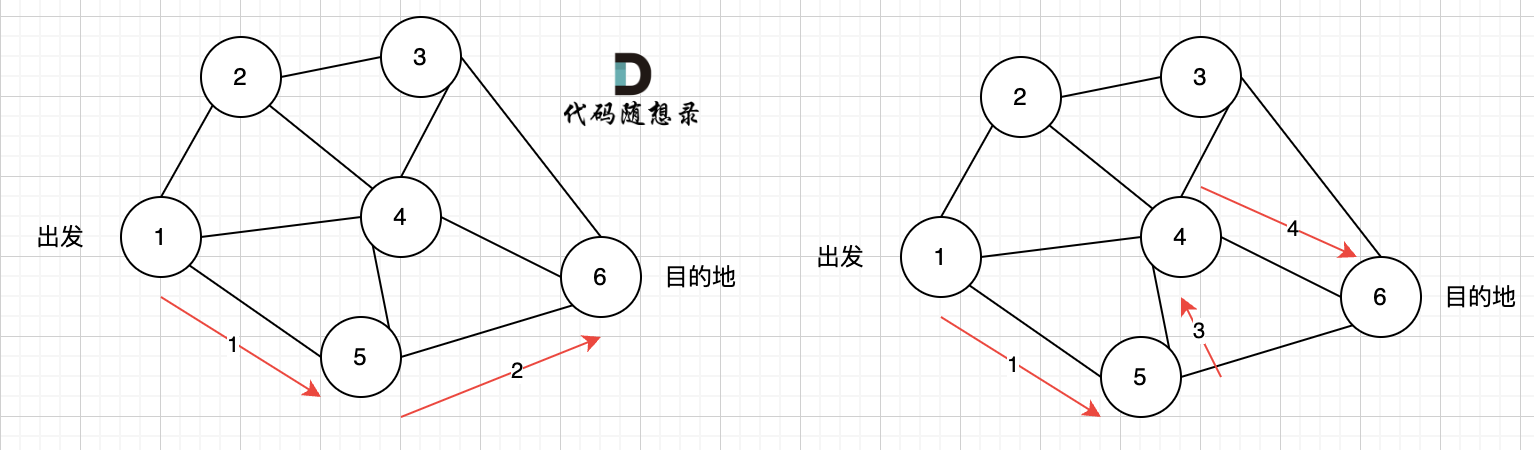
如图七所示, 路径2 已经走到了 目的地节点6,那么 路径2 是如何撤销,然后改为 路径3呢? 其实这就是 回溯的过程,撤销路径2,走换下一个方向。
98. 所有可达路径
1、题目
【题目描述】
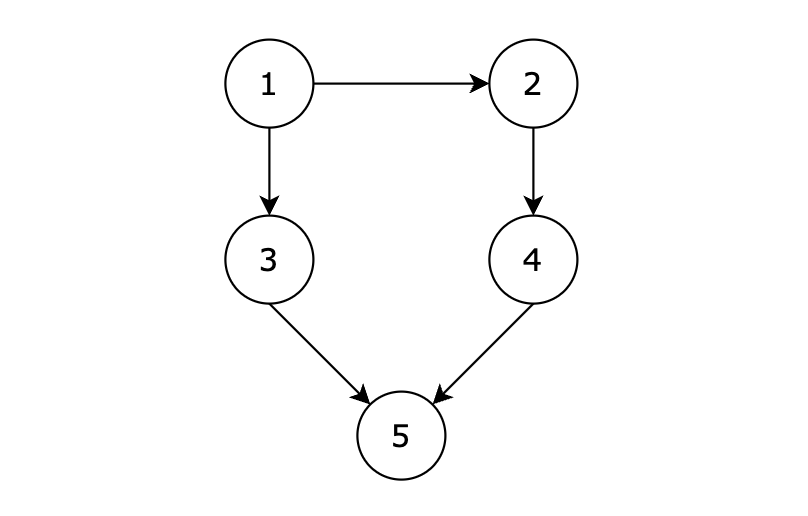
给定一个有 n 个节点的有向无环图,节点编号从 1 到 n。请编写一个函数,找出并返回所有从节点 1 到节点 n 的路径。每条路径应以节点编号的列表形式表示。
【输入描述】
第一行包含两个整数 N,M,表示图中拥有 N 个节点,M 条边
后续 M 行,每行包含两个整数 s 和 t,表示图中的 s 节点与 t 节点中有一条路径
【输出描述】
输出所有的可达路径,路径中所有节点的后面跟一个空格,每条路径独占一行,存在多条路径,路径输出的顺序可任意。
如果不存在任何一条路径,则输出 -1。
注意输出的序列中,最后一个节点后面没有空格! 例如正确的答案是 1 3 5,而不是 1 3 5, 5后面没有空格!
【输入示例】
5 5
1 3
3 5
1 2
2 4
4 5
【输出示例】
1 3 5
1 2 4 5
提示信息
用例解释:
有五个节点,其中的从 1 到达 5 的路径有两个,分别是 1 -> 3 -> 5 和 1 -> 2 -> 4 -> 5。
因为拥有多条路径,所以输出结果为:
1 3 5
1 2 4 5
或
1 2 4 5
1 3 5
都算正确。
数据范围:
- 图中不存在自环
- 图中不存在平行边
- 1 <= N <= 100
- 1 <= M <= 500
2、题解
图的存储
邻接矩阵
邻接矩阵 使用 二维数组来表示图结构。 邻接矩阵是从节点的角度来表示图,有多少节点就申请多大的二维数组。
本题我们会有n 个节点,因为节点标号是从1开始的,为了节点标号和下标对齐,我们申请 n + 1 * n + 1 这么大的二维数组。
vector<vector<int>> graph(n + 1, vector<int>(n + 1, 0));
输入m个边,构造方式如下:
while (m--) {
cin >> s >> t;
// 使用邻接矩阵 ,1 表示 节点s 指向 节点t
graph[s][t] = 1;
}
邻接表
邻接表 使用 数组 + 链表的方式来表示。 邻接表是从边的数量来表示图,有多少边 才会申请对应大小的链表。
邻接表的构造相对邻接矩阵难理解一些。
我在 图论理论基础篇 举了一个例子:
这里表达的图是:
- 节点1 指向 节点3 和 节点5
- 节点2 指向 节点4、节点3、节点5
- 节点3 指向 节点4
- 节点4指向节点1
我们需要构造一个数组,数组里的元素是一个链表。
C++写法:
// 节点编号从1到n,所以申请 n+1 这么大的数组
vector<list<int>> graph(n + 1); // 邻接表,list为C++里的链表
输入m个边,构造方式如下:
while (m--) {
cin >> s >> t;
// 使用邻接表 ,表示 s -> t 是相连的
graph[s].push_back(t);
}
本题我们使用邻接表 或者 邻接矩阵都可以,因为后台数据并没有对图的大小以及稠密度做很大的区分。
以下我们使用邻接矩阵的方式来讲解,文末我也会给出 使用邻接表的整体代码。
注意邻接表 和 邻接矩阵的写法都要掌握!
深度优先搜索
深搜三部曲来分析题目:
1、确认递归函数,参数
首先我们dfs函数一定要存一个图,用来遍历的,需要存一个目前我们遍历的节点,定义为x。
还需要存一个n,表示终点,我们遍历的时候,用来判断当 x==n 时候 标明找到了终点。
(其实在递归函数的参数 不容易一开始就确定了,一般是在写函数体的时候发现缺什么,参加就补什么)
至于 单一路径 和 路径集合 可以放在全局变量,那么代码是这样的:
vector<vector<int>> result; // 收集符合条件的路径
vector<int> path; // 0节点到终点的路径
// x:目前遍历的节点
// graph:存当前的图
// n:终点
void dfs (const vector<vector<int>>& graph, int x, int n) {
2、确认终止条件
什么时候我们就找到一条路径了?
当目前遍历的节点 为 最后一个节点 n 的时候 就找到了一条 从出发点到终止点的路径。
// 当前遍历的节点x 到达节点n
if (x == n) { // 找到符合条件的一条路径
result.push_back(path);
return;
}
3、处理目前搜索节点出发的路径
接下来是走 当前遍历节点x的下一个节点。
首先是要找到 x节点指向了哪些节点呢? 遍历方式是这样的:
for (int i = 1; i <= n; i++) { // 遍历节点x链接的所有节点
if (graph[x][i] == 1) { // 找到 x指向的节点,就是节点i
}
}
接下来就是将 选中的x所指向的节点,加入到 单一路径来。
path.push_back(i); // 遍历到的节点加入到路径中来
进入下一层递归
dfs(graph, i, n); // 进入下一层递归
最后就是回溯的过程,撤销本次添加节点的操作。
该过程整体代码:
for (int i = 1; i <= n; i++) { // 遍历节点x链接的所有节点
if (graph[x][i] == 1) { // 找到 x链接的节点
path.push_back(i); // 遍历到的节点加入到路径中来
dfs(graph, i, n); // 进入下一层递归
path.pop_back(); // 回溯,撤销本节点
}
}
打印结果
ACM格式大家在输出结果的时候,要关注看看格式问题,特别是字符串,有的题目说的是每个元素后面都有空格,有的题目说的是 每个元素间有空格,最后一个元素没有空格。
有的题目呢,压根没说,那只能提交去试一试了。
很多人在提交题目的时候发现结果一样,为什么提交就是不对呢。
例如示例输出是:
1 3 5` 而不是 `1 3 5
即 5 的后面没有空格!
这是我们在输出的时候需要注意的点。
有人可能会想,ACM格式就是麻烦,有空格没有空格有什么影响,结果对了不就行了?
ACM模式相对于核心代码模式(力扣) 更考验大家对代码的掌控能力。 例如工程代码里,输出输出都是要自己控制的。这也是为什么大公司笔试,都是ACM模式。
以上代码中,结果都存在了 result数组里(二维数组,每一行是一个结果),最后将其打印出来。(重点看注释)
// 输出结果
if (result.size() == 0) cout << -1 << endl;
for (const vector<int> &pa : result) {
for (int i = 0; i < pa.size() - 1; i++) { // 这里指打印到倒数第二个
cout << pa[i] << " ";
}
cout << pa[pa.size() - 1] << endl; // 这里再打印倒数第一个,控制最后一个元素后面没有空格
}
本题代码
邻接矩阵写法
#include <iostream>
#include <vector>
using namespace std;
vector<vector<int>> result; // 收集符合条件的路径
vector<int> path; // 1节点到终点的路径
void dfs (const vector<vector<int>>& graph, int x, int n) {
// 当前遍历的节点x 到达节点n
if (x == n) { // 找到符合条件的一条路径
result.push_back(path);
return;
}
for (int i = 1; i <= n; i++) { // 遍历节点x链接的所有节点
if (graph[x][i] == 1) { // 找到 x链接的节点
path.push_back(i); // 遍历到的节点加入到路径中来
dfs(graph, i, n); // 进入下一层递归
path.pop_back(); // 回溯,撤销本节点
}
}
}
int main() {
int n, m, s, t;
cin >> n >> m;
// 节点编号从1到n,所以申请 n+1 这么大的数组
vector<vector<int>> graph(n + 1, vector<int>(n + 1, 0));
while (m--) {
cin >> s >> t;
// 使用邻接矩阵 表示无线图,1 表示 s 与 t 是相连的
graph[s][t] = 1;
}
path.push_back(1); // 无论什么路径已经是从0节点出发
dfs(graph, 1, n); // 开始遍历
// 输出结果
if (result.size() == 0) cout << -1 << endl;
for (const vector<int> &pa : result) {
for (int i = 0; i < pa.size() - 1; i++) {
cout << pa[i] << " ";
}
cout << pa[pa.size() - 1] << endl;
}
}
邻接表写法
#include <iostream>
#include <vector>
#include <list>
using namespace std;
vector<vector<int>> result; // 收集符合条件的路径
vector<int> path; // 1节点到终点的路径
void dfs (const vector<list<int>>& graph, int x, int n) {
if (x == n) { // 找到符合条件的一条路径
result.push_back(path);
return;
}
for (int i : graph[x]) { // 找到 x指向的节点
path.push_back(i); // 遍历到的节点加入到路径中来
dfs(graph, i, n); // 进入下一层递归
path.pop_back(); // 回溯,撤销本节点
}
}
int main() {
int n, m, s, t;
cin >> n >> m;
// 节点编号从1到n,所以申请 n+1 这么大的数组
vector<list<int>> graph(n + 1); // 邻接表
while (m--) {
cin >> s >> t;
// 使用邻接表 ,表示 s -> t 是相连的
graph[s].push_back(t);
}
path.push_back(1); // 无论什么路径已经是从0节点出发
dfs(graph, 1, n); // 开始遍历
// 输出结果
if (result.size() == 0) cout << -1 << endl;
for (const vector<int> &pa : result) {
for (int i = 0; i < pa.size() - 1; i++) {
cout << pa[i] << " ";
}
cout << pa[pa.size() - 1] << endl;
}
}
广度优先搜索理论基础
在深度优先搜索的讲解中,我们就讲过深度优先搜索和广度优先搜索的区别。
广搜(bfs)是一圈一圈的搜索过程,和深搜(dfs)是一条路跑到黑然后再回溯。
广搜的使用场景
广搜的搜索方式就适合于解决两个点之间的最短路径问题。
因为广搜是从起点出发,以起始点为中心一圈一圈进行搜索,一旦遇到终点,记录之前走过的节点就是一条最短路。
当然,也有一些问题是广搜 和 深搜都可以解决的,例如岛屿问题,这类问题的特征就是不涉及具体的遍历方式,只要能把相邻且相同属性的节点标记上就行。 (我们会在具体题目讲解中详细来说)
广搜的过程
上面我们提过,BFS是一圈一圈的搜索过程,但具体是怎么一圈一圈来搜呢。
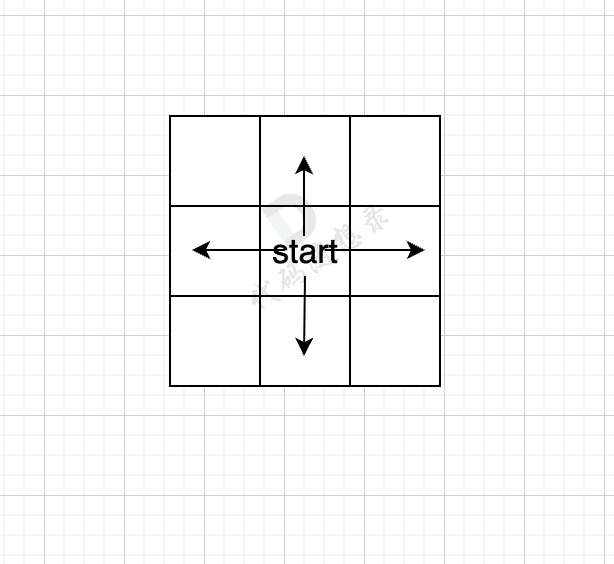
我们用一个方格地图,假如每次搜索的方向为 上下左右(不包含斜上方),那么给出一个start起始位置,那么BFS就是从四个方向走出第一步。
如果加上一个end终止位置,那么使用BFS的搜索过程如图所示:
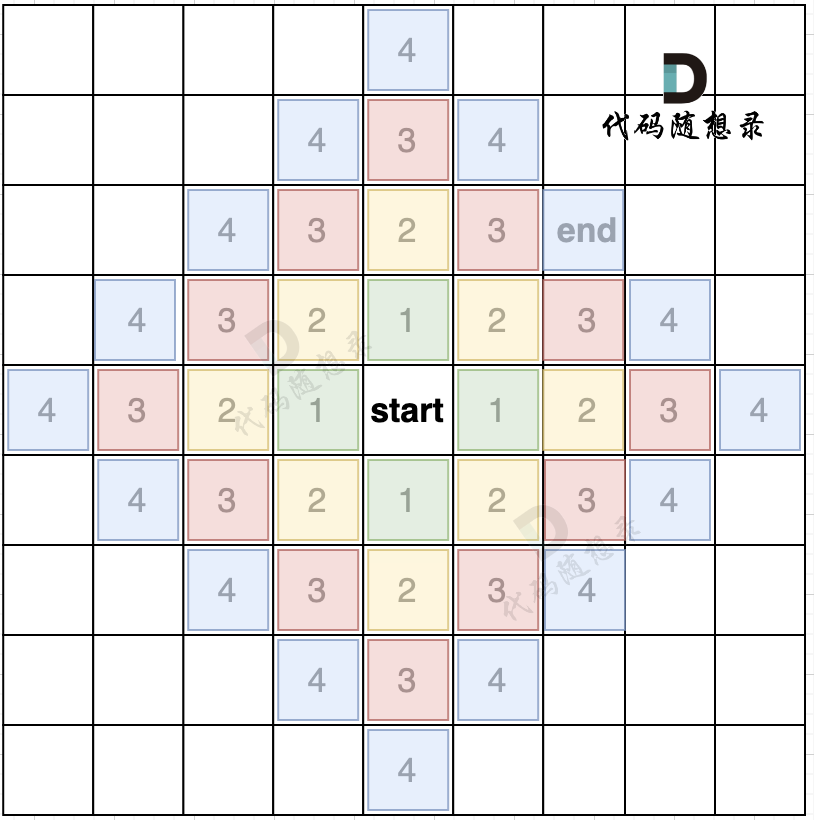
我们从图中可以看出,从start起点开始,是一圈一圈,向外搜索,方格编号1为第一步遍历的节点,方格编号2为第二步遍历的节点,第四步的时候我们找到终止点end。
正是因为BFS一圈一圈的遍历方式,所以一旦遇到终止点,那么一定是一条最短路径。
而且地图还可以有障碍,如图所示:
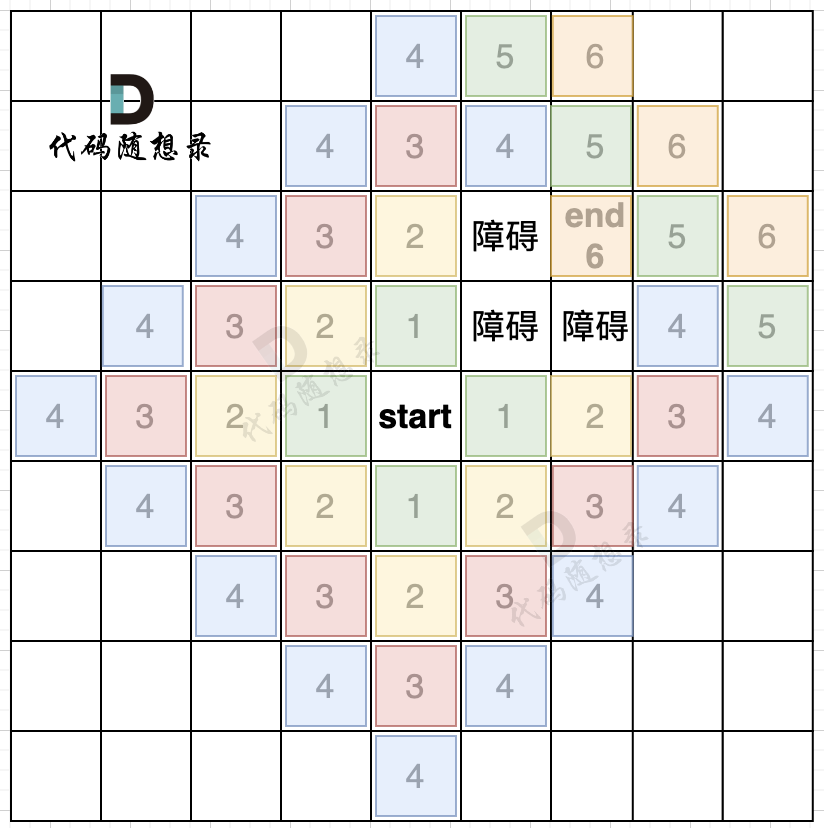
在第五步,第六步 我只把关键的节点染色了,其他方向周边没有去染色,大家只要关注关键地方染色的逻辑就可以。
从图中可以看出,如果添加了障碍,我们是第六步才能走到end终点。
只要BFS只要搜到终点一定是一条最短路径,大家可以参考上面的图,自己再去模拟一下。
代码框架
大家应该好奇,这一圈一圈的搜索过程是怎么做到的,是放在什么容器里,才能这样去遍历。
很多网上的资料都是直接说用队列来实现。
其实,我们仅仅需要一个容器,能保存我们要遍历过的元素就可以,那么用队列,还是用栈,甚至用数组,都是可以的。
用队列的话,就是保证每一圈都是一个方向去转,例如统一顺时针或者逆时针。
因为队列是先进先出,加入元素和弹出元素的顺序是没有改变的。
如果用栈的话,就是第一圈顺时针遍历,第二圈逆时针遍历,第三圈有顺时针遍历。
因为栈是先进后出,加入元素和弹出元素的顺序改变了。
那么广搜需要注意 转圈搜索的顺序吗? 不需要!
所以用队列,还是用栈都是可以的,但大家都习惯用队列了,所以下面的讲解用我也用队列来讲,只不过要给大家说清楚,并不是非要用队列,用栈也可以。
下面给出广搜代码模板,该模板针对的就是,上面的四方格的地图: (详细注释)
int dir[4][2] = {0, 1, 1, 0, -1, 0, 0, -1}; // 表示四个方向
// grid 是地图,也就是一个二维数组
// visited标记访问过的节点,不要重复访问
// x,y 表示开始搜索节点的下标
void bfs(vector<vector<char>>& grid, vector<vector<bool>>& visited, int x, int y) {
queue<pair<int, int>> que; // 定义队列
que.push({x, y}); // 起始节点加入队列
visited[x][y] = true; // 只要加入队列,立刻标记为访问过的节点
while(!que.empty()) { // 开始遍历队列里的元素
pair<int ,int> cur = que.front(); que.pop(); // 从队列取元素
int curx = cur.first;
int cury = cur.second; // 当前节点坐标
for (int i = 0; i < 4; i++) { // 开始想当前节点的四个方向左右上下去遍历
int nextx = curx + dir[i][0];
int nexty = cury + dir[i][1]; // 获取周边四个方向的坐标
if (nextx < 0 || nextx >= grid.size() || nexty < 0 || nexty >= grid[0].size()) continue; // 坐标越界了,直接跳过
if (!visited[nextx][nexty]) { // 如果节点没被访问过
que.push({nextx, nexty}); // 队列添加该节点为下一轮要遍历的节点
visited[nextx][nexty] = true; // 只要加入队列立刻标记,避免重复访问
}
}
}
}















 196
196

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









