









本总结是是个人为防止遗忘而作,不得转载和商用。
关于奇异值分解的名字:
第一次看“奇异值分解”时真是超不知所以。不过它的英文名字是Singular Value Decompostion。而Signular是“突出的、奇特的、非凡的”的意思,于是用“优值分解”的这个名字好像更贴切些,而且“优值分解”这个名字的第一印象就比“奇异值分解”更让人容易接受。
什么是奇异值分解:
假设A是一个m*n的实矩阵,那么一定存在这样一个分解使得:
Am*n= Um*mΣm*nVTn*n
其中,U和V都是单位正交方阵,Σ是一个只有45°对角线上存在非零值的矩阵。
这时,称这样一个分解为奇异值分解;
Σ对角线上的元素σi是矩阵A的奇异值;
U的第i列称为A的关于σi的左奇异向量;
V的第i列称为A的关于σi的右奇异向量;
看了上面的介绍是不是还不明所以,没关系,下面我会继续解释,总之知道这样一种分解是奇异值分解就是了。
PS:就好像对于一个数,我总能把它写成3个数相乘似得,对于一个矩阵,我总能通过某种方法把它分解成这样的形式,你别管我用的什么方法,但你总的承认我能把它分解对吧。
奇异值分解定义的解释:
为了对奇异值分解更有概念,我们来对定义举个小例子。
对于一个矩阵A
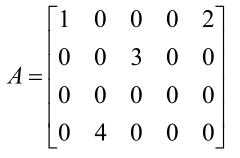
我总能通过某种方式将其分解成A = UΣVT的样子(你别管我怎么分解的),其中UΣV如下:
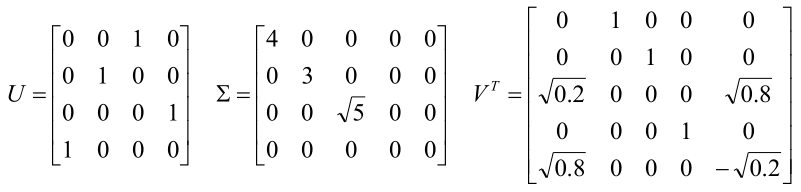
且U和V是单位正交方阵,即:矩阵U和V满足式子:
UTU = I,VTV= I
Σ是只有45°对角线上有非零元素的矩阵(注意是45°对角线)。
这时,这样的分解就是奇异值分解。
Σ中45°对角线上的那三个非零元素就是矩阵A的奇异值。
奇异值分解有什么作用:
现在我们已经知道,通过奇异值分解可以把矩阵A分解成UΣV三个矩阵相乘的形式,但奇异值分解到底有什么用呢?
为了说明这个,我假设A是个m*n的矩阵,那经过奇异值分解后,U就是m*m的矩阵,Σ是m*n的矩阵,V是n*n的矩阵(为什么?因为根据定义U和V都是方阵,如果还看不懂,那你需要复习下矩阵的乘法了。)
然后,把矩阵M的每一列用一个列向量ui表示,于是矩阵U我就可以写成
U = [u1, u2, …, ui,…, um]
同理,把V的每一行用一个行向量vi表示后,矩阵V就可以写成
V = [v1, v2, …, vi,…, vn]
而Σ因为只有对角线上有非零元素,所以我们用σi表示Σ上每一行的非零元素。
这时,如果我们只取这三个矩阵的前k个元素,就有:
A = UΣV = u1σ1v1 + u2σ2v2 + … + ukσkvk
这意味着什么?
这意味着我们将m*n这样一个维度的矩阵A降成了k*k维!
当然这样一来降维后的矩阵和原来的矩阵不同,即:数学结果不同。
不过在实际应用中,这个降维后的矩阵其效果是和原矩阵一样的!
例子:
下面我写的SVD压缩图片的效果和代码(restore函数来自于皱博老师)
首先是效果。
原图:

使用SVD分解压缩后后:

上面四张图是分别取前1、10、40、80个特征向量的结果。
可以看到,取前80个特征向量就已经可以把原图恢复的差不多了,而代码中经过mtr.shape = (649, 2886)转换之后可是有649个特征向量的。
下面是代码,其中我的疑问也在里面,如果有谁知道答案的话,不知可否在评论里告知一下,不胜感激。
#-*-coding:utf-8-*-
# 关于 svd 压缩图片的问题
# 问题0:
# 在 restore 函数的
# b = a.astype('uint8')
# 前加上如下3行可以解决本人的实验图片经svd 压缩并使用 restore 函数保存后图片太扁的问题
# n = n / 3
# a.shape = (m, n, 3)
# a.transpose()
# 但即使是以参数的方式传入这个 3,但是不是还是太有针对性?
#
# 问题1:
# 上课时听老师讲 SVD 时说的的矩阵的2维的,而我使用
# mtr = np.array(im)
# 将 im 转换成矩阵后,矩阵是3维的,矩阵的信息如下:
# # Mtr -- ndim:3, shape:(649, 962, 3), size:1873014
# 这是为什么?
# 是本来就是这样,需要我在转换成矩阵后在将其处理2维的吗?还是什么?
#
# 问题2:
# 在问题1的基础上,图片读取成矩阵后如何处理这个矩阵?
# 我这边如代码所示,在使用下面两行代码
# mtr.shape = (649, 2886)
# mtr.transpose()
# 处理图片,最后使用 defrestore 保存出来的图片会特别的扁。
#
# 问题3:
# 有没有什么方法可以
# "读取图片 -> 将图片数据转换成矩阵 -> 使用svd -> 代入 def restore"
# 而不是像我写的
# "读取图片 -> 将图片数据转换成矩阵 -> 将矩阵处理成秩为2的矩阵 -> 使用svd -> 代入 def restore"
#
# 其他:我使用的图片在 http://pan.baidu.com/s/1i4GLeSH
import os
import sys
import Image
import numpy as np
BASIC_PATH = sys.path[0]
def restore(sigma, u, v, k):
m= len(u)
n= len(v[0])
a= np.zeros((m, n))
for k in range(k+1):
for i in range(m):
# a[0] = sigma 的第一个 * u 的第一列 * v 的第一行
# a[1] = sigma 的第二个 * u 的第二列 * v 的第二行
# 以此类推
a[i] += sigma[k] * u[i][k] * v[k]
#下面三行是我自己添加的,否则保存出来的图片会太扁
n= n / 3
a.shape = (m, n, 3)
a.transpose()
b= a.astype('uint8')
Image.fromarray(b).save("svd_" + str(k) + ".jpg")
# 读取图片
im = Image.open("%s/1.jpg" %BASIC_PATH)
# 将图片信息转换成矩阵
mtr = np.array(im)
# Image -- format:JPEG, size:(962, 649), mode:RGB
print 'Image\t--\tformat:%s, size:%s,mode:%s' % (im.format, str(im.size), im.mode)
# Mtr -- ndim:3, shape:(649, 962, 3),size:1873014
print 'Mtr\t-- \tndim:%s, shape:%s,size:%d' % (str(mtr.ndim), str(mtr.shape), mtr.size)
# 这里矩阵的秩是3,将其转成2
mtr.shape = (649, 2886)
mtr.transpose()
# svd
# 这里 U 和 VT 是秩为 2 的矩阵,sigma 矩阵的秩为 1
U, sigma, VT = np.linalg.svd(mtr,full_matrices=False)
# 取前 k 个特征向量
k = 100
# 保存图片
restore(sigma, U, VT, k)
im = Image.open("%s/svd_%s.jpg" %(BASIC_PATH, k))
im.show()















 37万+
37万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









