







转载请声明出处http://blog.csdn.net/zhongkejingwang/article/details/43053513
在网上看到有很多文章介绍SVD的,讲的也都不错,但是感觉还是有需要补充的,特别是关于矩阵和映射之间的对应关系。前段时间看了国外的一篇文章,叫A Singularly Valuable Decomposition The SVD of a Matrix,觉得分析的特别好,把矩阵和空间关系对应了起来。本文就参考了该文并结合矩阵的相关知识把SVD原理梳理一下。
SVD不仅是一个数学问题,在工程应用中的很多地方都有它的身影,比如前面讲的PCA,掌握了SVD原理后再去看PCA那是相当简单的,在推荐系统方面,SVD更是名声大噪,将它应用于推荐系统的是Netflix大奖的获得者Koren,可以在Google上找到他写的文章;用SVD可以很容易得到任意矩阵的满秩分解,用满秩分解可以对数据做压缩。可以用SVD来证明对任意M*N的矩阵均存在如下分解:
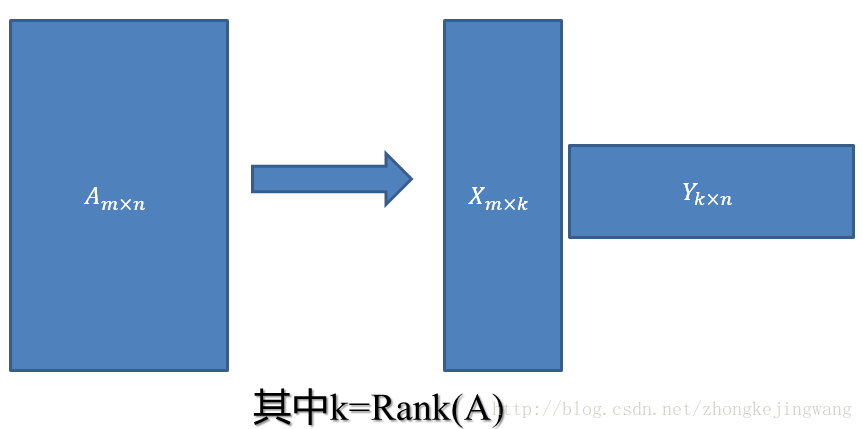
这个可以应用在数据降维压缩上!在数据相关性特别大的情况下存储X和Y矩阵比存储A矩阵占用空间更小!
在开始讲解SVD之前,先补充一点矩阵代数的相关知识。
正交矩阵
正交矩阵是在欧几里得空间里的叫法,在酉空间里叫酉矩阵,一个正交矩阵对应的变换叫正交变换,这个变换的特点是不改变向量的尺寸和向量间的夹角,那么它到底是个什么样的变换呢?看下面这张图
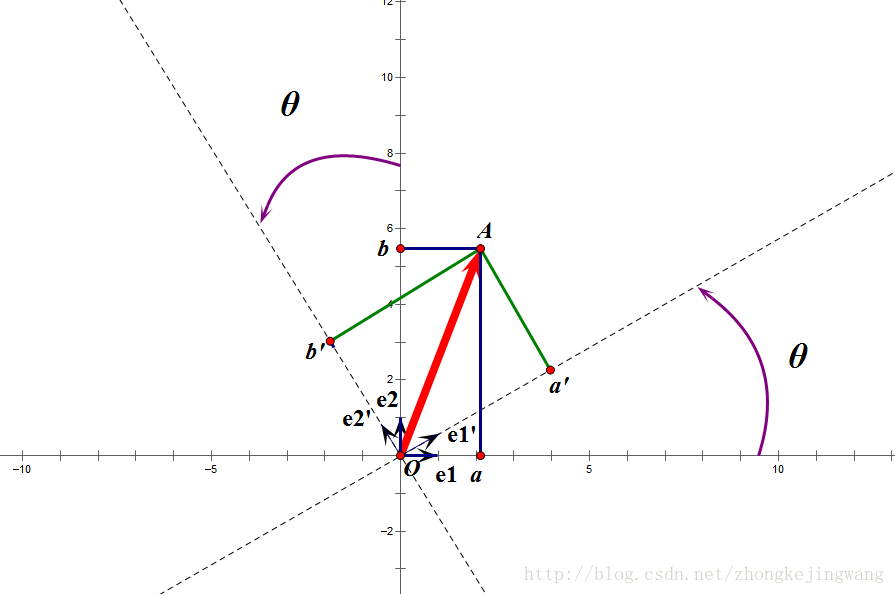
假设二维空间中的一个向量OA,它在标准坐标系也即e1、e2表示的坐标是中表示为(a,b)'(用'表示转置),现在把它用另一组坐标e1'、e2'表示为(a',b')',存在矩阵U使得(a',b')'=U(a,b)',则U即为正交矩阵。从图中可以看到,正交变换只是将变换向量用另一组正交基表示,在这个过程中并没有对向量做拉伸,也不改变向量的空间位置,加入对两个向量同时做正交变换,那么变换前后这两个向量的夹角显然不会改变。上面的例子只是正交变换的一个方面,即旋转变换,可以把e1'、e2'坐标系看做是e1、e2坐标系经过旋转某个斯塔角度得到,怎么样得到该旋转矩阵U呢?如下

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









