







一、概述
主要实现了FPGA向STM32快速发送数据(比较稳定),至于STM32发送过来的数据,大概率还是处于丢位状态。但因为我主要是要完成一个FPGA这边持续向STM32的发送,所以我也没仔细去研究如何实现双方通信更稳定(同时本人能力也有限)。
至于SPI的通信时序,有四种模式,我选择的是空闲状态为高电平,采集在上升沿的一种模式。具体的时序可以参考其他博客,我自己的理解(以我选择的这种模式)就是在sck为低电平的时候寄存数据,然后一直保持数据到下一次sck为低电平。获取数据的话在sck拉高的瞬间,也就是sck的上升沿获取数据。
STM32端我使用的是SPI5加DMA的方式来进行数据的收发。
下面贴出FPGA和STM32的代码
二、FPGA端代码
spi主模式
module spi_master(
input clk_1m, //时钟信号 1m
input rst_n, //按键复位信号
input ena_mo, //模块使能
input [7:0]spi_tdata, //spi要发送的数据
input spi_miso, //spi 主进从出
output reg spi_mosi, //spi 从进主出
output reg spi_sck, //spi 时钟信号
output reg spi_nss, //spi 片选信号
output reg [7:0]spi_rdata, //spi接收到的数据
output tr_done //spi 完成一个字节发送
);
localparam waiten=0; //等待模块使能
localparam tx_revl=1; //sck低电平
localparam tx_revh=2; //sck高电平
localparam done=3; //完成一次发送
localparam DELAY = 5; //完成时等待5个时钟开始下一次发送
//reg define
reg [3:0] us_cnt; //us计数器
reg us_cnt_clr; //计数器清零信号
reg[1:0] state,next_state; //当前状态和下一个状态
reg[3:0] w_cnt; //位计数器
//1微秒计数器
always @ (posedge clk_1m,negedge rst_n) begin
if (!rst_n)
us_cnt <= 21'd0;
else if (us_cnt_clr)
us_cnt <= 21'd0;
else
us_cnt <= us_cnt + 1'b1;
end
//下一个状态确认
always @(*) begin
if(!rst_n)
next_state = waiten;
case(state)
//模块使能且计数达到延时则进入下一个状态
waiten: next_state = (ena_mo&&us_cnt==DELAY) ? tx_revl : waiten;
tx_revl: next_state = tx_revh;
tx_revh: next_state = (w_cnt == 4'd8) ? done : tx_revl;
done: next_state = (ena_mo&&us_cnt==DELAY) ? tx_revl : waiten;
endcase
end
//状态的各变量赋值
always @(posedge clk_1m,negedge rst_n)begin
if(!rst_n)begin
spi_sck <= 1'b1; //sck空闲状态为高电平
spi_mosi <= 1'b0;
spi_rdata <= 8'd0;
us_cnt_clr <= 1'b1;
spi_nss <= 1'b1;
end
else begin
case(state)
waiten:begin
spi_sck <= 1'b1;
spi_mosi <= 1'b0;
us_cnt_clr <= 1'b0;
spi_nss <= us_cnt > 3'd3 ? 1'b0 : 1'b1; //nss信号在等待时提前拉低 选中 做好发送准备
end
tx_revl:begin
us_cnt_clr <= 1'b1;
spi_mosi <= spi_tdata[3'd7-w_cnt]; //sck低电平时寄存数据
spi_sck <= 1'b0; //sck拉低
end
tx_revh:begin
spi_sck <= 1'b1; //sck拉高 数据值保持不变
spi_rdata[3'd7-(w_cnt-1'b1)] <= spi_miso; //在上升沿捕获数据值
end
done:begin
us_cnt_clr <= 1'b0; //发送完成 时钟计数器关闭复位,延时等待一下
spi_sck <= 1'b1;
spi_mosi <= 1'b0;
spi_nss <= us_cnt > 3'd3 ? 1'b0 : 1'b1; //nss信号在等待时提前拉低 选中 做好发送准备
end
endcase
end
end
//状态转换
always @(posedge clk_1m,negedge rst_n)begin
if(!rst_n)
state <= waiten;
else
state <= next_state;
end
//位计数器赋值
always @(posedge clk_1m,negedge rst_n)begin
if(!rst_n)begin
w_cnt <= 4'd0;
end
else begin
case(state)
tx_revl:w_cnt <= w_cnt + 1'b1;//sck低电平时位计数器加1,所以高电平时就会多一个值,需要减1
waiten: w_cnt <= 4'd0;
done: w_cnt <= 4'd0;
default: w_cnt <= w_cnt;
endcase
end
end
//完成信号输出赋值
assign tr_done = (state == done);
endmoduletestbench仿真代码
`timescale 1ns/1ns //仿真单位为1ns,精度为1ns
module spi_master_tb();
reg clk_1m;
reg rst_n;
reg ena_mo;
reg [7:0] spi_tdata;
reg spi_miso;
wire spi_mosi;
wire spi_sck;
wire spi_nss;
wire [7:0] spi_rdata;
spi_master u_spi_master(
.clk_1m(clk_1m),
.rst_n(rst_n),
.ena_mo(ena_mo),
.spi_tdata(spi_tdata),
.spi_miso(spi_miso),
.spi_mosi(spi_mosi),
.spi_sck(spi_sck),
.spi_nss(spi_nss),
.spi_rdata(spi_rdata)
);
initial begin
#0 clk_1m = 0;
rst_n = 0;
ena_mo = 1;
spi_tdata = 8'b11001010;
spi_miso = 0;
#20 rst_n = 1;
end
always #5 clk_1m = ~clk_1m;
always #32 spi_miso = ~spi_miso;
endmodule仿真结果

顶层模块
module oscilloscope(
input sys_clk, //系统时钟 50m
input rst_n, //按键复位
input spi_miso, //spi 主进从出信号
output spi_mosi, //spi 主出从进信号
output spi_sck, //spi 时钟信号
output spi_nss //spi 片选信号(使用这个信号可以提高传输的稳定性)
);
wire [7:0] spi_rdata; //spi读取到的数据
wire [7:0] spi_tdata; //spi要发送的数据
wire tr_done; //一个字节发送完成信号
wire clk_1m; //1M 时钟信号
reg [7:0] tx_data; //给要发送的数据赋值
assign spi_tdata = tx_data;//要发送的数据赋值
always @(posedge clk_1m,negedge rst_n)begin
if(!rst_n)
tx_data <= 8'd0;
else begin
tx_data <= tr_done ? tx_data + 1'b1 : tx_data;//每发送完成一个字节 数据的值增加1
end
end
//时钟分频模块 产生1MHz时钟
clk_fenpin u_clk_fenpin(
.sys_clk(sys_clk),
.rst_n(rst_n),
.clk_1m(clk_1m)
);
//spi 主模式模块
spi_master u_spi_master(
.clk_1m(clk_1m),
.rst_n(rst_n),
.ena_mo(1'b1),
.spi_tdata(tx_data),
.spi_miso(spi_miso),
.spi_mosi(spi_mosi),
.spi_sck(spi_sck),
.spi_nss(spi_nss),
.spi_rdata(spi_rdata),
.tr_done(tr_done)
);
endmodule时钟分频模块
module clk_fenpin(
input sys_clk,
input rst_n,
output reg clk_1m
);
reg [25:0] clk_cnt ; //分频计数器
//得到1Mhz分频时钟
always @ (posedge sys_clk or negedge rst_n) begin
if (!rst_n) begin
clk_cnt <= 5'd0;
clk_1m <= 1'b0;
end
else if (clk_cnt < 26'd24)
clk_cnt <= clk_cnt + 1'b1;
else begin
clk_cnt <= 5'd0;
clk_1m <= ~ clk_1m;
end
end
endmodule三、STM32断配置
32的配置主要是NSS信号不能再由软件来控制,不然接收的数据很不稳定,每一次复位都会看到不一样的值,可能是因为32端对起始信号的判断不是很对,所以导致总是,丢位。虽然也有概率正确接收,但是极其不稳定,所以将NSS信号交由硬件控制。FPGA作为主机,在每次将要发送前,先将NSS信号拉低,选中32,然后发送完成一个字节后又将NSS信号拉高,这样传输的数据会稳定很多。
spi配置
u8 spi_revdata[spirv_max_len]; //接收数据数组
SPI_HandleTypeDef SPI5_Handler; //SPI句柄
u8 tx = 15; //发送的数据
//以下是SPI模块的初始化代码,配置成主机模式
//SPI口初始化
//这里针是对SPI5的初始化
void SPI5_Init(void)
{
SPI5_Handler.Instance=SPI5; //SP5
SPI5_Handler.Init.Mode=SPI_MODE_SLAVE; //设置SPI工作模式,设置为从模式
SPI5_Handler.Init.Direction=SPI_DIRECTION_2LINES; //设置SPI单向或者双向的数据模式:SPI设置为双线模式
SPI5_Handler.Init.DataSize=SPI_DATASIZE_8BIT; //设置SPI的数据大小:SPI发送接收8位帧结构
SPI5_Handler.Init.CLKPolarity=SPI_POLARITY_HIGH; //串行同步时钟的空闲状态为高电平
SPI5_Handler.Init.CLKPhase=SPI_PHASE_2EDGE; //串行同步时钟的第二个跳变沿(上升或下降)数据被采样
SPI5_Handler.Init.NSS=SPI_NSS_HARD_INPUT; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理 选择硬件管理
SPI5_Handler.Init.BaudRatePrescaler=SPI_BAUDRATEPRESCALER_4;//定义波特率预分频的值:波特率预分频值为4
SPI5_Handler.Init.FirstBit=SPI_FIRSTBIT_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
SPI5_Handler.Init.TIMode=SPI_TIMODE_DISABLE; //关闭TI模式
SPI5_Handler.Init.CRCCalculation=SPI_CRCCALCULATION_DISABLE;//关闭硬件CRC校验
SPI5_Handler.Init.CRCPolynomial=7; //CRC值计算的多项式
HAL_SPI_Init(&SPI5_Handler);//初始化
__HAL_SPI_ENABLE(&SPI5_Handler); //使能SPI5
DMA2_Init(); //DMA初始化
//开启SPI的DMA传输 1024个字节
HAL_SPI_TransmitReceive_DMA(&SPI5_Handler,&tx,spi_revdata,spirv_max_len);
//发送和接收如果同时使用的话最好使用上面那个函数,不然开启发送,再开接收可能导致没有开启成功
// HAL_SPI_Transmit_DMA(&SPI5_Handler,&tx,1024);
// HAL_SPI_Receive_DMA(&SPI5_Handler,spi_revdata,spirv_max_len);
}
//SPI5底层驱动,时钟使能,引脚配置
//此函数会被HAL_SPI_Init()调用
//hspi:SPI句柄
void HAL_SPI_MspInit(SPI_HandleTypeDef *hspi)
{
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_GPIOF_CLK_ENABLE(); //使能GPIOF时钟
__HAL_RCC_SPI5_CLK_ENABLE(); //使能SPI5时钟
//PF6,7,8,9
GPIO_Initure.Pin=GPIO_PIN_6|GPIO_PIN_7|GPIO_PIN_8|GPIO_PIN_9;
GPIO_Initure.Mode=GPIO_MODE_AF_PP; //复用推挽输出
GPIO_Initure.Pull=GPIO_NOPULL; //上拉
GPIO_Initure.Speed=GPIO_SPEED_FAST; //快速
GPIO_Initure.Alternate=GPIO_AF5_SPI5; //复用为SPI5
HAL_GPIO_Init(GPIOF,&GPIO_Initure);
}dma配置
DMA_HandleTypeDef DMA_SPI5TX_Handler; //SPI5 发送DMA句柄
DMA_HandleTypeDef DMA_SPI5RX_Handler; //SPI5 接收DMA句柄
void DMA2_Init(void)
{
__HAL_RCC_DMA2_CLK_ENABLE(); //使能DMA2的时钟
DMA_SPI5RX_Handler.Instance = DMA2_Stream3; //数据流选择
DMA_SPI5RX_Handler.Init.Channel = DMA_CHANNEL_2; //通道选择
DMA_SPI5RX_Handler.Init.Direction = DMA_PERIPH_TO_MEMORY; //外设到存储器
DMA_SPI5RX_Handler.Init.PeriphInc = DMA_PINC_DISABLE; //外设地址非增量模式
DMA_SPI5RX_Handler.Init.MemInc = DMA_MINC_ENABLE; //存储器地址增量模式
DMA_SPI5RX_Handler.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE; //外设数据长度:8位
DMA_SPI5RX_Handler.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE; //存储器数据长度:8位
DMA_SPI5RX_Handler.Init.Mode = DMA_CIRCULAR; //DMA循环模式 一次开启 一直搬运
DMA_SPI5RX_Handler.Init.Priority = DMA_PRIORITY_HIGH; //高优先级
DMA_SPI5RX_Handler.Init.FIFOMode = DMA_FIFOMODE_DISABLE; //不使用FIFO模式
HAL_DMA_DeInit(&DMA_SPI5RX_Handler); //清除配置
HAL_DMA_Init(&DMA_SPI5RX_Handler); //初始化配置
__HAL_LINKDMA(&SPI5_Handler,hdmarx,DMA_SPI5RX_Handler); //将SPI的发送和DMA联系起来
DMA_SPI5TX_Handler.Instance = DMA2_Stream4; //数据流选择
DMA_SPI5TX_Handler.Init.Channel = DMA_CHANNEL_2; //通道选择
DMA_SPI5TX_Handler.Init.Direction = DMA_MEMORY_TO_PERIPH; //存储器到外设
DMA_SPI5TX_Handler.Init.PeriphInc = DMA_PINC_DISABLE; //外设地址非增量模式
DMA_SPI5TX_Handler.Init.MemInc = DMA_MINC_DISABLE; //存储器地址非增量模式
DMA_SPI5TX_Handler.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE; //外设数据长度:8位
DMA_SPI5TX_Handler.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE; //存储器数据长度:8位
DMA_SPI5TX_Handler.Init.Mode = DMA_CIRCULAR; //DMA循环模式 一次开启 一直搬运
DMA_SPI5TX_Handler.Init.Priority = DMA_PRIORITY_MEDIUM; //中等优先级
DMA_SPI5TX_Handler.Init.FIFOMode = DMA_FIFOMODE_DISABLE; //不使用FIFO模式
HAL_DMA_DeInit(&DMA_SPI5TX_Handler); //清除配置
HAL_DMA_Init(&DMA_SPI5TX_Handler); //初始化配置
__HAL_LINKDMA(&SPI5_Handler,hdmatx,DMA_SPI5TX_Handler); //将SPI的发送和DMA联系起来
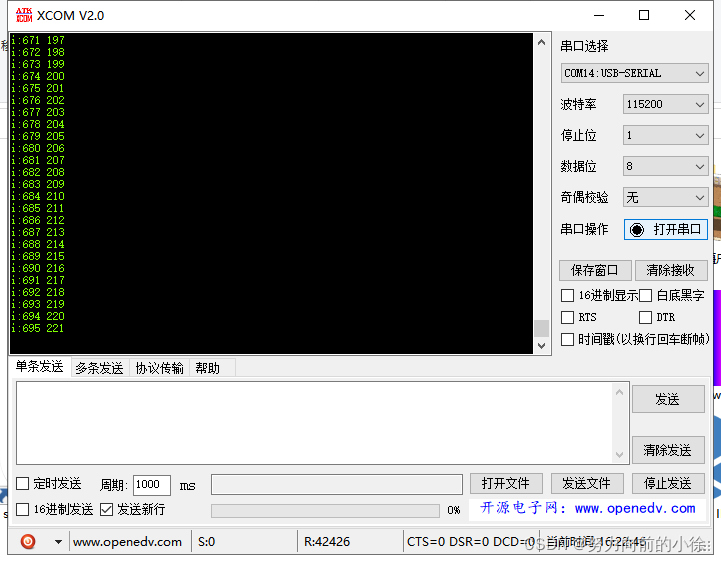
}四、实现效果
stm32接收到的数据,打印的是接收数组中的值(此时的发送频率应该在几十KHz左右,更高的没有测试过,但是改改时钟分频看看就好)
FPGA收到的数据非常不稳定,很小概率会出现正确的值,就不贴图了















 1734
1734











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









