







Faster Rcnn代码走读(一) 网络框架(PRN层)
本文基于TENSORFLOW的FASTER RCNN的实现。GITHUB地址:
https://github.com/endernewton/tf-faster-rcnn
算法原理传送门,可以参考这篇知乎的文章:
https://zhuanlan.zhihu.com/p/24916624?refer=xiaoleimlnote
本文参考了:
https://blog.csdn.net/u013010889/article/details/78574879
关于ROI和损失函数的内容在第二篇:
https://blog.csdn.net/yangchengtest/article/details/80642949
整体框架:
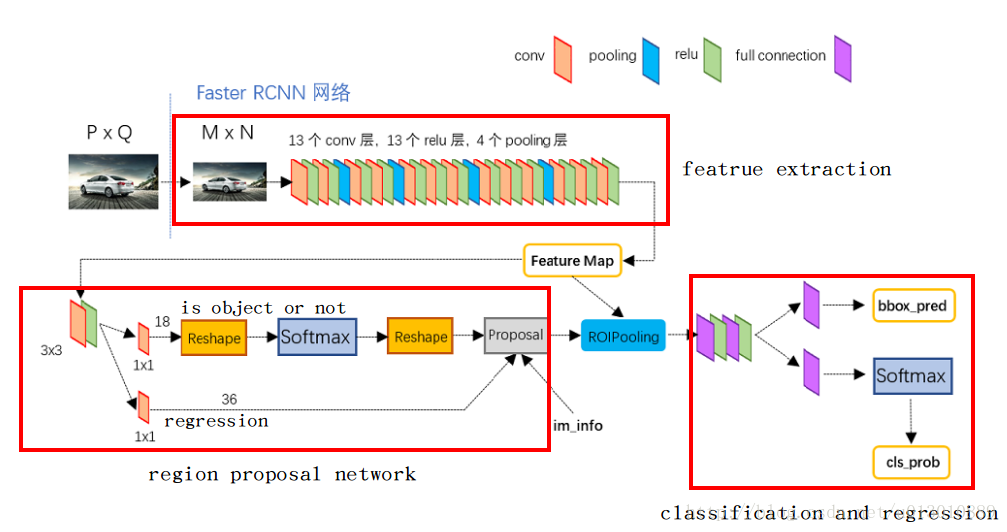
网络代码调用链:
trainval_net(main.train_val)->train_val(train_model.construct_graph)->network(create_architecutre)
卷积层
目前支持的网络有VGG16和RESNET。
通过复写父类的_image_to_head来实现卷积层。
RPN的实现
ANCHOR:
network(_build_network)->network(_anchor_component)->snippets(generate_anchors_pre)
通过generate_anchors(generate_anchors)生成9个基准anchors.
生成基准anchors的流程在上述文件里,主要看一下:
def _ratio_enum(anchor, ratios):
"""
Enumerate a set of anchors for each aspect ratio wrt an anchor.
"""
w, h, x_ctr, y_ctr = _whctrs(anchor)
size = w * h
size_ratios = size / ratios
ws = np.round(np.sqrt(size_ratios))
hs = np.round(ws * ratios)
anchors = _mkanchors(ws, hs, x_ctr, y_ctr)
return anchors生成基准anchor后,
height = tf.to_int32(tf.ceil(self._im_info[0] / np.float32(self._feat_stride[0])))
width = tf.to_int32(tf.ceil(self._im_info[1] / np.float32(self._feat_stride[0])))snippets(generate_anchors_pre) 函数生成H*W的网格。
shift_x = np.arange(0, width) * feat_stride
shift_y = np.arange(0, height) * feat_stride
shift_x, shift_y = np.meshgrid(shift_x, shift_y)结合生成的9个基准anchor,
anchors = anchors.reshape((1, A, 4)) + shifts.reshape((1, K, 4)).transpose((1, 0, 2))
anchors = anchors.reshape((K * A, 4)).astype(np.float32, copy=False)
length = np.int32(anchors.shape[0])最后生成(H*W*9,4)的anchors,放入网络的类变量中.
self._anchors = anchors
self._anchor_length = anchor_length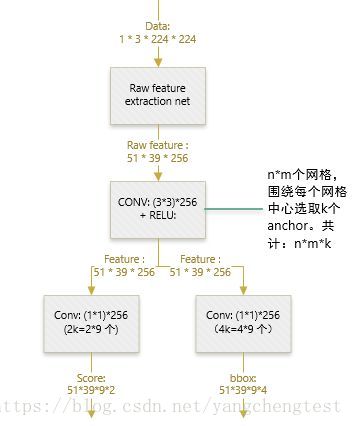
网络框架的代码在:
newwork(_region_proposal)中实现
rpn = slim.conv2d(net_conv, cfg.RPN_CHANNELS, [3, 3], trainable=is_training, weights_initializer=initializer,
scope="rpn_conv/3x3")
self._act_summaries.append(rpn)
rpn_cls_score = slim.conv2d(rpn, self._num_anchors * 2, [1, 1], trainable=is_training,
weights_initializer=initializer,
padding='VALID', activation_fn=None, scope='rpn_cls_score')
# change it so that the score has 2 as its channel size
rpn_cls_score_reshape = self._reshape_layer(rpn_cls_score, 2, 'rpn_cls_score_reshape')
rpn_cls_prob_reshape = self._softmax_layer(rpn_cls_score_reshape, "rpn_cls_prob_reshape")
rpn_cls_pred = tf.argmax(tf.reshape(rpn_cls_score_reshape, [-1, 2]), axis=1, name="rpn_cls_pred")
rpn_cls_prob = self._reshape_layer(rpn_cls_prob_reshape, self._num_anchors * 2, "rpn_cls_prob")
rpn_bbox_pred = slim.conv2d(rpn, self._num_anchors * 4, [1, 1], trainable=is_training,
weights_initializer=initializer,
padding='VALID', activation_fn=None, scope='rpn_bbox_pred')anchor_target_layer
rpn_labels, rpn_bbox_targets, rpn_bbox_inside_weights, rpn_bbox_outside_weights = tf.py_func(
anchor_target_layer,
[rpn_cls_score, self._gt_boxes, self._im_info, self._feat_stride, self._anchors, self._num_anchors],
[tf.float32, tf.float32, tf.float32, tf.float32],
name="anchor_target")这个函数将输入的目标数据和PRN的score进行转化。
代码在:anchor_target_layer(anchor_target_layer)
样本标记:
a. 对每个标定的ground true box区域,与其重叠比例最大的anchor记为 正样本 (保证每个ground true 至少对应一个正样本anchor)b. 对a)剩余的anchor,如果其与某个标定区域重叠比例大于0.7,记为正样本(每个ground true box可能会对应多个正样本anchor。但每个正样本anchor 只可能对应一个grand true box);如果其与任意一个标定的重叠比例都小于0.3,记为负样本。
代码主要是:
label: 1 is positive, 0 is negative, -1 is dont care
labels = np.empty((len(inds_inside),), dtype=np.float32)
labels.fill(-1)
# overlaps between the anchors and the gt boxes
# overlaps (ex, gt)
overlaps = bbox_overlaps(
np.ascontiguousarray(anchors, dtype=np.float),
np.ascontiguousarray(gt_boxes, dtype=np.float))
argmax_overlaps = overlaps.argmax(axis=1)
max_overlaps = overlaps[np.arange(len(inds_inside)), argmax_overlaps]
gt_argmax_overlaps = overlaps.argmax(axis=0)
gt_max_overlaps = overlaps[gt_argmax_overlaps,
np.arange(overlaps.shape[1])]
gt_argmax_overlaps = np.where(overlaps == gt_max_overlaps)[0]
if not cfg.TRAIN.RPN_CLOBBER_POSITIVES:
# assign bg labels first so that positive labels can clobber them
# first set the negatives
labels[max_overlaps < cfg.TRAIN.RPN_NEGATIVE_OVERLAP] = 0
# fg label: for each gt, anchor with highest overlap
labels[gt_argmax_overlaps] = 1
# fg label: above threshold IOU
labels[max_overlaps >= cfg.TRAIN.RPN_POSITIVE_OVERLAP] = 1
if cfg.TRAIN.RPN_CLOBBER_POSITIVES:
# assign bg labels last so that negative labels can clobber positives
labels[max_overlaps < cfg.TRAIN.RPN_NEGATIVE_OVERLAP] = 0同时,最多采样数是256,正向和逆向采样数有限制。
# Max number of foreground examples
__C.TRAIN.RPN_FG_FRACTION = 0.5
# Total number of examples
__C.TRAIN.RPN_BATCHSIZE = 256bbox_targets = _compute_targets(anchors, gt_boxes[argmax_overlaps, :])
Faster-RCNN BBOX转化公式:
For bounding box regression, we adopt the parameterizations
of the 4 coordinates following
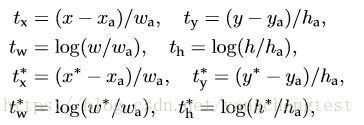
通过上述公式计算差值。
# only the positive ones have regression targets
bbox_inside_weights[labels == 1, :] = np.array(cfg.TRAIN.RPN_BBOX_INSIDE_WEIGHTS)
__C.TRAIN.RPN_BBOX_INSIDE_WEIGHTS = (1.0, 1.0, 1.0, 1.0)
if cfg.TRAIN.RPN_POSITIVE_WEIGHT < 0:
# uniform weighting of examples (given non-uniform sampling)
num_examples = np.sum(labels >= 0)
positive_weights = np.ones((1, 4)) * 1.0 / num_examples
negative_weights = np.ones((1, 4)) * 1.0 / num_examples
else:
assert ((cfg.TRAIN.RPN_POSITIVE_WEIGHT > 0) &
(cfg.TRAIN.RPN_POSITIVE_WEIGHT < 1))
positive_weights = (cfg.TRAIN.RPN_POSITIVE_WEIGHT /
np.sum(labels == 1))
negative_weights = ((1.0 - cfg.TRAIN.RPN_POSITIVE_WEIGHT) /
np.sum(labels == 0))
bbox_outside_weights[labels == 1, :] = positive_weights
bbox_outside_weights[labels == 0, :] = negative_weights
默认值:
__C.TRAIN.RPN_POSITIVE_WEIGHT = -1.0
_proposal_layer
再看一下BBOX的预测
rois, roi_scores = self._proposal_layer(rpn_cls_prob, rpn_bbox_pred, “rois”)
BBOX转化公式:
公式中,符号的含义解释一下:x 是坐标预测值,xa 是anchor坐标(预设固定值),x∗ 是坐标真实值(标注信息),其他变量 y,w,h 以此类推,t变量是偏移量。然后把前两个公式变形,就可以得到正确的公式:
x=(tx∗wa)+xa
y=(ty∗ha)+ya
同理:
w=exp(tw)*wa
h=exp(th)*ha
通过上述公式,将BBOX的预测转换成真实坐标。
proposals = bbox_transform_inv_tf(anchors, rpn_bbox_pred)
具体的代码在:bbox_transform(bbox_transform_inv_tf)中实现
接着使用TF的image.non_max_suppression基于scores做NMS预测。
indices = tf.image.non_max_suppression(proposals, scores, max_output_size=post_nms_topN, iou_threshold=nms_thresh)
boxes = tf.gather(proposals, indices)
boxes = tf.to_float(boxes)
scores = tf.gather(scores, indices)
scores = tf.reshape(scores, shape=(-1, 1))默认参数:
__C.TRAIN.RPN_NMS_THRESH = 0.7
__C.TRAIN.RPN_POST_NMS_TOP_N = 2000
__C.TEST.RPN_NMS_THRESH = 0.7
__C.TEST.RPN_POST_NMS_TOP_N = 300
# Only support single image as input
batch_inds = tf.zeros((tf.shape(indices)[0], 1), dtype=tf.float32)
blob = tf.concat([batch_inds, boxes], 1)_proposal_target_layer
在proposal_layer得到了NMS处理后的Proposal的scores和真实坐标。
rois, roi_scores = self._proposal_layer(rpn_cls_prob, rpn_bbox_pred, “rois”)
rois, _ = self._proposal_target_layer(rois, roi_scores, “rpn_rois”)
rois, roi_scores, labels, bbox_targets, bbox_inside_weights, bbox_outside_weights = tf.py_func(
proposal_target_layer,
[rois, roi_scores, self._gt_boxes, self._num_classes],
[tf.float32, tf.float32, tf.float32, tf.float32, tf.float32, tf.float32],
name="proposal_target")接着来看一下proposal_target_layer的处理:
# Minibatch size (number of regions of interest [ROIs])
__C.TRAIN.BATCH_SIZE = 128
# Fraction of minibatch that is labeled foreground (i.e. class > 0)
__C.TRAIN.FG_FRACTION = 0.25
rois_per_image = cfg.TRAIN.BATCH_SIZE / num_images
fg_rois_per_image = np.round(cfg.TRAIN.FG_FRACTION * rois_per_image)
# Sample rois with classification labels and bounding box regression
# targets
labels, rois, roi_scores, bbox_targets, bbox_inside_weights = _sample_rois(
all_rois, all_scores, gt_boxes, fg_rois_per_image,
rois_per_image, _num_classes)# Overlap threshold for a ROI to be considered foreground (if >= FG_THRESH)
__C.TRAIN.FG_THRESH = 0.5
# Overlap threshold for a ROI to be considered background (class = 0 if
# overlap in [LO, HI))
__C.TRAIN.BG_THRESH_HI = 0.5
__C.TRAIN.BG_THRESH_LO = 0.1
# Select foreground RoIs as those with >= FG_THRESH overlap
fg_inds = np.where(max_overlaps >= cfg.TRAIN.FG_THRESH)[0]
# Guard against the case when an image has fewer than fg_rois_per_image
# Select background RoIs as those within [BG_THRESH_LO, BG_THRESH_HI)
bg_inds = np.where((max_overlaps < cfg.TRAIN.BG_THRESH_HI) &
(max_overlaps >= cfg.TRAIN.BG_THRESH_LO))[0]然后就是根据各个阈值抽样。
PS:这些阈值也太多了。
bbox_target_data = _compute_targets(
rois[:, 1:5], gt_boxes[gt_assignment[keep_inds], :4], labels)
# Normalize the targets using "precomputed" (or made up) means and stdevs
# (BBOX_NORMALIZE_TARGETS must also be True)
__C.TRAIN.BBOX_NORMALIZE_TARGETS_PRECOMPUTED = True
__C.TRAIN.BBOX_NORMALIZE_MEANS = (0.0, 0.0, 0.0, 0.0)
__C.TRAIN.BBOX_NORMALIZE_STDS = (0.1, 0.1, 0.2, 0.2)
targets = ((targets - np.array(cfg.TRAIN.BBOX_NORMALIZE_MEANS))
/ np.array(cfg.TRAIN.BBOX_NORMALIZE_STDS))和anchor_target不同,这里还有归一化的操作。
bbox_targets, bbox_inside_weights = \
_get_bbox_regression_labels(bbox_target_data, num_classes)
def _get_bbox_regression_labels(bbox_target_data, num_classes):
"""Bounding-box regression targets (bbox_target_data) are stored in a
compact form N x (class, tx, ty, tw, th)
This function expands those targets into the 4-of-4*K representation used
by the network (i.e. only one class has non-zero targets).
Returns:
bbox_target (ndarray): N x 4K blob of regression targets
bbox_inside_weights (ndarray): N x 4K blob of loss weights
"""和anchor_target一样,inside_weights是[1.0,1.0,1.0,1.0]
PRN层最终返回:
rois = self._region_proposal(net_conv, is_training, initializer)
rois即经过proposal_layer和proposal_target_layer抽样后的Proposal。















 1319
1319











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









