







windows下线程同步
windows下的一些同步方法,volatile、Interlocke函数、CRITICAL_SECTION、SRWLOCK、Mutex。
- volatile:
变量声明为 volatile 变量,对于仅有一个线程写,其余线程读的变量,是安全的,如:
volatile int num = 0;- Interlocked函数:
该系列函数能实现原子操作:
LONG __cdecl InterlockedIncrement(_Inout_ LONG volatile *Addend);
LONG __cdecl InterlockedDecrement(_Inout_ LONG volatile *Addend);
LONG __cdecl InterlockedExchange(_Inout_ LONG volatile *Target,_In_ LONG Value);
LONG __cdecl InterlockedExchangeAdd(_Inout_ LONG volatile *Addend,_In_ LONG Value);
PVOID __cdecl InterlockedExchangePointer(_Inout_ PVOID volatile *Target,_In_ PVOID Value);
等.- CRITICAL_SECTION:
操作函数:
//临界区初始化
void WINAPI InitializeCriticalSection(_Out_ LPCRITICAL_SECTION lpCriticalSection);
//初始化临界区和自旋锁次数,临界区无法进入时会循环一定次数,如果还是无法进入则线程睡眠
BOOL WINAPI InitializeCriticalSectionAndSpinCount(_Out_ LPCRITICAL_SECTION lpCriticalSection,_In_ DWORD dwSpinCount);
//进入临界区,如果无法进入则线程睡眠
void WINAPI EnterCriticalSection(_Inout_ LPCRITICAL_SECTION lpCriticalSection);
//进入临界区,如果无法进入,则立即返回FALSE,不会进入睡眠
BOOL WINAPI TryEnterCriticalSection(_Inout_ LPCRITICAL_SECTION lpCriticalSection);
//离开临界区,在 return 之前离开
void WINAPI LeaveCriticalSection(_Inout_ LPCRITICAL_SECTION lpCriticalSection);
//释放临界区资源
void WINAPI DeleteCriticalSection(_Inout_ LPCRITICAL_SECTION lpCriticalSection);- SRWLOCK读写锁:
操作函数:
//初始化
VOID WINAPI InitializeSRWLock(_Out_ PSRWLOCK SRWLock);
//独占进入,用于写
VOID WINAPI AcquireSRWLockExclusive(_Inout_ PSRWLOCK SRWLock);
//释放独占锁
VOID WINAPI ReleaseSRWLockExclusive(_Inout_ PSRWLOCK SRWLock);
//共享进入,用于读
VOID WINAPI AcquireSRWLockShared(_Inout_ PSRWLOCK SRWLock);
//释放共享锁
VOID WINAPI ReleaseSRWLockShared(_Inout_ PSRWLOCK SRWLock);
//尝试进入独占锁,进入失败则立即返回FALSE,线程不会进入睡眠,进入成功返回TRUE并拥有锁
BOOLEAN WINAPI TryAcquireSRWLockExclusive(_Inout_ PSRWLOCK SRWLock);
//尝试进入共享锁,进入失败则立即返回FALSE,线程不会进入睡眠,进入成功返回TRUE并拥有锁
BOOLEAN WINAPI TryAcquireSRWLockShared(_Inout_ PSRWLOCK SRWLock);
//使用条件变量唤醒锁
BOOL WINAPI SleepConditionVariableSRW(_Inout_ PCONDITION_VARIABLE ConditionVariable,_Inout_ PSRWLOCK SRWLock,_In_ DWORD dwMilliseconds,_In_ ULONG Flags);- Mutex:
操作函数:
//创建mutex
HANDLE WINAPI CreateMutex(_In_opt_ LPSECURITY_ATTRIBUTES lpMutexAttributes,_In_ BOOL bInitialOwner,_In_opt_ LPCTSTR lpName);
//等待
DWORD WINAPI WaitForSingleObject(_In_ HANDLE hHandle,_In_ DWORD dwMilliseconds);
//释放
BOOL WINAPI ReleaseMutex(_In_ HANDLE hMutex);代码:
#include "stdafx.h"
#include <windows.h>
#include <iostream>
#include <iomanip>
typedef void (*OPFunc)();
CRITICAL_SECTION g_cs;
SRWLOCK g_SRWlock;
volatile LONG gv_num = 0;
LONG g_num = 0;
HANDLE g_hMutex;
const static ULONG gcs_count = 1000000;
void FuncVolatileRead()
{
auto iRead = gv_num;
}
void FuncVolatileWrite()
{
gv_num = 1;
}
void FuncInterlock()
{
InterlockedAdd(&g_num, 2);
}
void FuncCriticalSection()
{
EnterCriticalSection(&g_cs);
++g_num;
LeaveCriticalSection(&g_cs);
}
void FuncSRWLockRead()
{
AcquireSRWLockShared(&g_SRWlock);
auto iRead = g_num;
ReleaseSRWLockShared(&g_SRWlock);
}
void FuncSRWLockWrite()
{
AcquireSRWLockExclusive(&g_SRWlock);
g_num = 1;
ReleaseSRWLockExclusive(&g_SRWlock);
}
void FuncMutex()
{
WaitForSingleObject(g_hMutex, INFINITE);
g_num = 0;
ReleaseMutex(g_hMutex);
}
DWORD WINAPI LoopFunc(PVOID param)
{
auto opFunc = (OPFunc)param;
for (int i = 0; i < gcs_count; ++i)
opFunc();
return 0;
}
void WaitFuncComplete(const int threadNum , OPFunc opFunc)
{
std::cout << "threadNum: " << threadNum << " time: ";
HANDLE * phThread = new HANDLE[threadNum];
for(int i = 0;i < threadNum;++i)
{
phThread[i] = CreateThread(NULL,0,LoopFunc,opFunc,0,NULL);
}
LARGE_INTEGER freq,start,end; //计时
QueryPerformanceFrequency(&freq);
QueryPerformanceCounter(&start);
WaitForMultipleObjects(threadNum,phThread,TRUE,INFINITE);
QueryPerformanceCounter(&end);
LONGLONG time = ((end.QuadPart - start.QuadPart) * 1000) / freq.QuadPart;
std::cout << std::setw(6) << time << "ms" << std::endl;
for(int i = 0;i < threadNum;++i)
CloseHandle(phThread[i]);
delete phThread;
phThread = NULL;
}
int main()
{
InitializeCriticalSectionAndSpinCount(&g_cs,4000);
InitializeSRWLock(&g_SRWlock);
g_hMutex = CreateMutex(NULL,FALSE,NULL);
for (int i = 1; i < 17; i *= 2)
{
std::cout << std::left << std::setw(16) << "Volatile Read ";
WaitFuncComplete(i,FuncVolatileRead);
std::cout << std::setw(16) << "Volatile Write ";
WaitFuncComplete(i,FuncVolatileWrite);
std::cout << std::setw(16) << "Interlock ";
WaitFuncComplete(i,FuncInterlock);
std::cout << std::setw(16) << "CriticalSection ";
WaitFuncComplete(i,FuncCriticalSection);
std::cout << std::setw(16) << "SRWLock Read ";
WaitFuncComplete(i,FuncSRWLockRead);
std::cout << std::setw(16) << "SRWLock Write ";
WaitFuncComplete(i,FuncSRWLockWrite);
std::cout << std::setw(16) << "Mutex ";
WaitFuncComplete(i,FuncMutex);
std::cout << std::endl;
}
DeleteCriticalSection(&g_cs);
CloseHandle(g_hMutex);
getchar();
return 0;
}计时函数:
LARGE_INTEGER freq,start,end; //计时
QueryPerformanceFrequency(&freq);
QueryPerformanceCounter(&start);
WaitForMultipleObjects(threadNum,phThread,TRUE,INFINITE);
QueryPerformanceCounter(&end);
LONGLONG time = ((end.QuadPart - start.QuadPart) * 1000) / freq.QuadPart;
std::cout << std::setw(6) << time << "ms" << std::endl;效果:
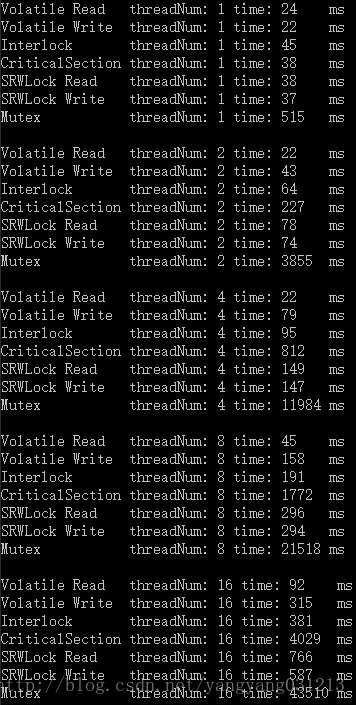
Debug版本:
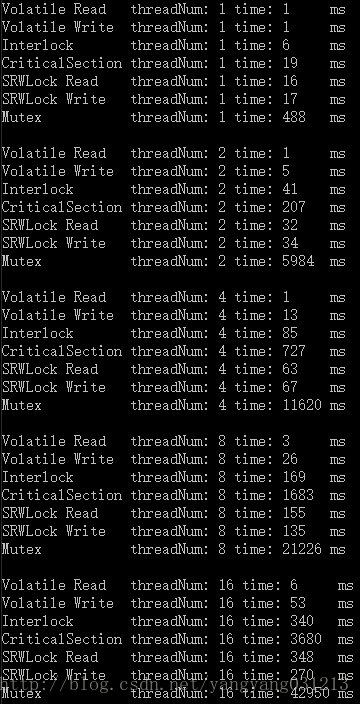
Release版本:
小结:
volatile 在所有方法中是最快的,volatile 写可能会引起 CPU 维护高速缓存之间的一致性,会比读取耗时多一些;SRWLOCK 比 CRITICAL_SECTION 效果能好一些,特别是在线程数量较多的时候;Mutex 会在用户态和内核态之间切换,导致性能下降;release版本比debug版本快得多。
代码链接:
http://download.csdn.net/detail/yangyang031213/9904036
https://github.com/yangyang0312/cpp/tree/master/windows/ThreadSync















 15
15

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









