







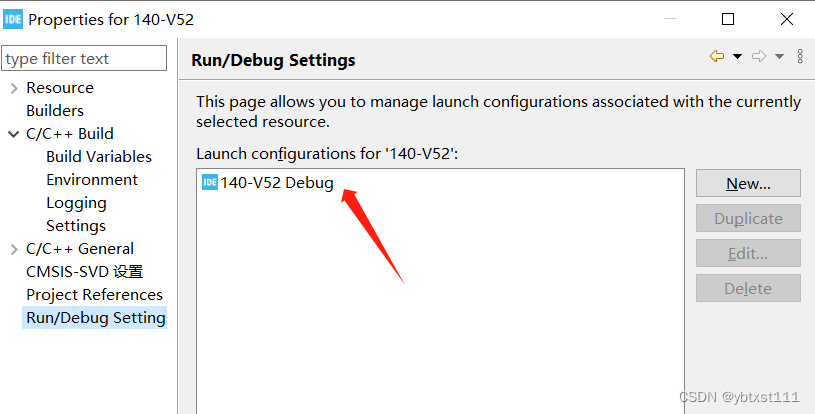
首先检查这里,如果是导入进来的工程不包含debug文件夹的话,这里是空的,即使编译之后也是空的,那么open declaration就不会跳转到函数主体,顶多跳转到外部使用声明中。
解决办法:
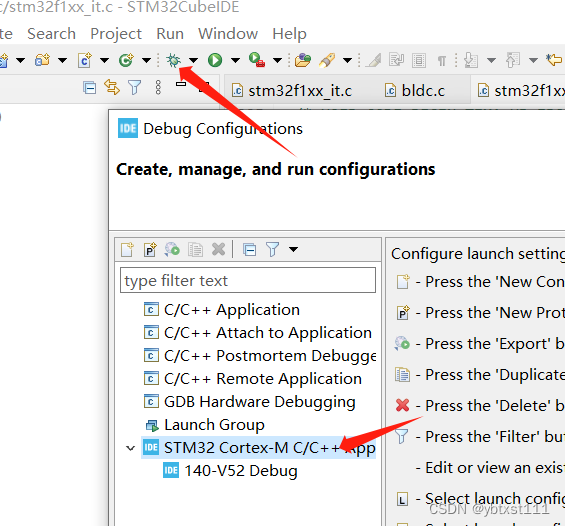
点击蜘蛛后,然后再双击下面箭头处,就会出现一个DEBUG配置。
编译之后,关闭工程,然后删除,再从新导入编译就可以了。
首先检查这里,如果是导入进来的工程不包含debug文件夹的话,这里是空的,即使编译之后也是空的,那么open declaration就不会跳转到函数主体,顶多跳转到外部使用声明中。
解决办法:
点击蜘蛛后,然后再双击下面箭头处,就会出现一个DEBUG配置。
编译之后,关闭工程,然后删除,再从新导入编译就可以了。
 654
654











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























