






一、AI边缘计算控制器的应用场景
1.1 智慧交通在城市交通智能化发展的背景下,交通监控摄像头数量众多,单个路口的高清摄像头每天就能产生几十G的视频文件。如果将这些视频数据全部传输到云端处理,会造成巨大的带宽浪费和存储压力。AI边缘计算控制器可在现场对视频进行智能处理,直接在本地分析违法行为,筛选有价值内容上传,大大降低了无效内容产生的带宽和存储浪费
1.2 在V2X(汽车无线通讯互联)场景中,AI边缘计算控制器能让道路驾驶更安全。它可以连接各种道路智能设备,为汽车提供限速、恶劣天气预警、并线提醒、路口信号灯配时调度等数据。在智能驾驶辅助汽车行驶过程中,会产生大量数据,如汽车自身数据(时速、油门与刹车开度等)、雷达和视觉等外部传感器探测的数据,以及在车路协同场景中其他车辆的位置、速度和电子路政设施的交互数据。AI边缘计算控制器能让汽车在不需要云计算的情况下,即可做出“潜意识”的正确反应,避免因数据上传云端处理再反馈车辆而产生的严重安全隐患,特别是在无信号的山洞、隧道中,或信号故障、干扰的区域
1.3 智能家居 随着物联网的普及,家庭中部署了大量的传感器和控制器,如智能照明控制、智能电视、智能空调等设备。为了保护家庭数据的私密性,AI边缘计算控制器可以在家庭内部网关进行数据处理,限制敏感数据外流,通过AI边缘计算控制器优化室内定位和家庭安防检测,能够获得比云计算更高的精度和更低的延迟。家庭娱乐也能从中受益,系统可自行推荐个性化服务,无需将用户偏好上传到云端,让用户拥有更好的娱乐体验。
1.4 智慧农业 以某畜牧企业为例,引入AI边缘计算控制器后,通过导入对应算法,将传统摄像头升级为人工智能摄像头,实现了边云结合,快速完成升级部署;升级后的系统可以全天候自动完成人员、服装识别;猪只出入、转栏识别;外来生物识别、轨迹监控;区域异常监控等工作。显著节约了人力成本,提高了企业的专业化、现代化水平
二、控制器的行业标准和国际&国家标准
从技术角度,边缘微控制器可分为专用微控制器和通用微控制器。专用微控制器针对特定的应用场景进行优化设计,例如边缘推理、图像识别等,具有较低的功耗和较高的计算效率;通用微控制器则提供更灵活的平台,支持多种算法和应用程序,适用于多样化的边缘计算需求;\
边缘微控制器作为边缘计算控制器的关键部件,行业定义为应用于边缘计算环境,具备处理能力的微型控制器。它通常集成了CPU、内存、存储器、I/O接口等基本功能,并支持特定的算法库,能够对数据进行实时处理和决策
在国际上,关于电磁兼容性测试标准主要有
IEC标准(国际电工委员会标准)
ISO标准(国际标准)
EN标准(欧洲标准)
FCC标准(美国标准)
CISPR标准(国际电工委员会标准)
MIL - STD标准(美国军用标准) 这些标准对AI边缘计算控制器的电磁兼容性等方面做出了规范
边缘计算控制器相关的中国国家标准有
GB/T17626.1 - 2012《电磁兼容检测系统要求:家用和类似用途的电气设备》
GB/T17626.2 - 2012《电磁兼容检测系统要求:低电压电器》
GB/T17626.3 - 2012《电磁兼容检测系统要求:信息技术设备》等
三、标准涉及到的EMC电磁兼容相关内容
3.1 电磁兼容(EMC)是指设备所产生的电磁能量既不对其他设备产生干扰,也不受其他设备的电磁能量干扰的能力。它包括电磁干扰(EMI)和电磁抗扰(EMS)两个方面
3.2 电磁干扰(EMI)是指电子设备通过电磁波对其他电子设备产生干扰的现象,最常见的例子如电脑噪声。电磁抗扰(EMS)是指设备在受到外部电磁波影响时,能够抵抗并抑制外部电磁波的能力,也就是“抗扰”的能力
3.3 根据不同电磁兼容标准在电磁兼容测试中的不同地位,电磁兼容标准体系可分为基础标准、通用标准、产品族标准及专用产品标准等4级
基础标准仅对现象、环境、试验方法、试验仪器和基本试验配置等给出定义及详细描述,但不涉及具体产品,例如: GB/T 4365《电磁兼容术语》 GB/T 6113《无线电骚扰和抗扰度测量设备规范》 通用标准给出了通用环境中的所有产品一系列最低的电磁兼容性要求,可作为产品族标准以及专用产品标准的编制导则;产品族标准和专用产品标准则针对特定的产品或产品类别,规定具体的电磁兼容要求和试验方法
3.4 电磁能量从设备内传出或从外界传入设备的途径只有两个,一个是以电磁波的形式从空间传播,另一个是以电流的形式沿导线传播。因此,电磁干扰发射可以分为传导发射和辐射发射;抗扰度也可以分为传导抗扰度和辐射抗扰度;电磁兼容标准的测试内容包括:传导发射、辐射发射、传导抗扰度、辐射抗扰度 在进行电磁兼容试验时,需要遵循一定原则,如受试设备要处于实际工作的状态、处于“最严酷”状态,使用最接近限值的数据等,以确保试验结果的准确性和可靠性
四、边缘计算控制器的功能模块
4.1 控制功能模块 在工业互联网边缘计算场景中,控制仍然是一个重要的核心功能。控制系统要求对环境可感知且执行要稳、准、快。大规模复杂系统对控制器的计算能力和实时响应要求严格,利用边缘计算增强本地计算能力,降低由云集中式计算带来的响应延迟是面向大规模复杂控制系统的有效解决方案;控制功能主要包括对环境的感知和执行、实时通信、实体抽象、控制系统建模、资产管理等。例如,在工业生产线上,边缘计算控制器通过连接传感器,实时感知设备的运行状态,如温度、压力、振动等参数,并根据预设的规则或算法,对设备进行实时控制,确保生产过程的稳定和高效
4.2 分析功能模块 分析功能模块主要负责对采集到的数据进行处理和分析,挖掘数据中的潜在价值。它可以运用各种数据分析算法和模型,对设备运行数据、生产过程数据等进行深入分析;通过对设备运行数据的分析,预测设备可能出现的故障,提前采取维护措施,避免设备故障导致的生产中断;对生产过程数据的分析,可以优化生产流程,提高生产效率和产品质量
4.3 优化功能模块 优化功能模块基于分析功能模块的结果,对系统进行优化调整。它可以对设备的运行参数、生产流程等进行优化,以实现系统的最佳性能;根据能源使用数据分析,优化设备的运行模式,降低能源消耗;根据生产质量数据分析,调整生产工艺参数,提高产品质量。同时,优化功能模块还可以与其他功能模块协同工作,实现系统的整体优化
五、控制器的供应电源、输入输出接口及失效
5.1 硬件故障:包括计算节点故障,如处理器故障、内存故障、存储设备故障等,可能导致设备无法正常运行或数据丢失
5.2 存储设备故障:如磁盘故障、固态硬盘故障、闪存故障等,会影响数据的存储和读取
5.3 网络设备故障:如网卡故障、交换机故障、路由器故障等,会导致网络连接中断或通信异常 5.4 传感器故障:如传感器本身损坏或传感器与边缘计算设备之间的通信故障,会使采集的数据不准确或无法采集数据。这些硬件故障可能是由设计缺陷、制造缺陷、使用不当、环境因素(如过热、振动、水损坏)等原因造成的
5.5 软件故障:操作系统故障,如内核错误、驱动程序错误、文件系统错误等,会导致系统崩溃或无法正常启动;应用程序故障,如代码错误、配置错误、数据错误等,会使应用程序无法正常运行或出现异常行为;固件故障,如设计缺陷、编码错误等,会影响硬件设备的基本功能。软件故障通常由软件缺陷、配置错误或不正确的输入引起
附录:供应电源
边缘计算控制器的电源供应通常需要稳定可靠,以保证设备的正常运行。常见的电源类型包括直流电源和交流电源,直流电源一般通过电源适配器将交流电转换为直流电为设备供电,具有电压稳定、干扰小等优点;交流电源则直接接入市电,但需要经过电源模块进行整流、滤波等处理,以满足设备对电源的要求。在一些对电源可靠性要求较高的场景中,还会配备不间断电源(UPS),以防止突然停电对设备造成影响
I/o 接口:
以太网接口包括PHY接口和RMII接口,RMII接口为简化2线的MII接口,通过PHY转换芯片转换为4线网络接口,PHY接口通过带磁隔离的RJ45接口扩展为4线网络接口,用于实现高速网络通信,与其他设备或云端进行数据交互 此外,还可能配备USB接口、GPIO接口、SPI接口、I2C接口等,以连接各种传感器、执行器和外部设备;
以ARM Cortex - A7核心板的边缘计算控制器为例,其扩展8路UART接口,其中6路UART接口通过隔离R485芯片转换为6路RS485接口,用于连接具有RS485接口的设备,实现数据的传输和控制 1路UART接口直接输出作为系统DEBUG接口 方便调试和监测系统运行状态 1路UART接口能扩展RS485接口或者LORA接口,以满足不同的通信需求
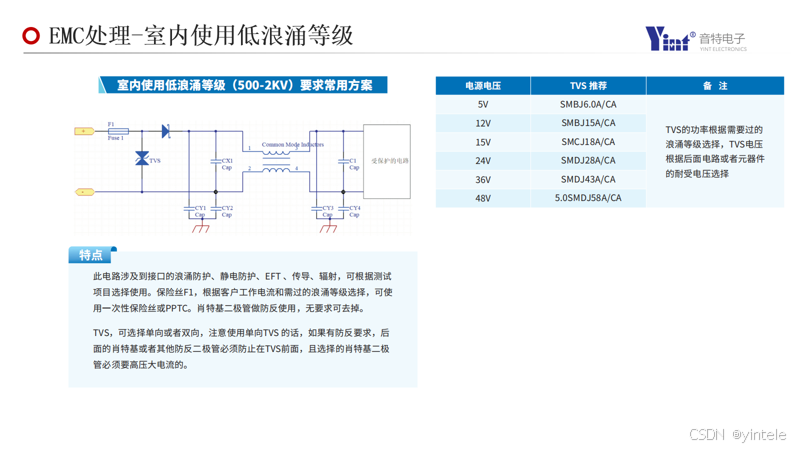
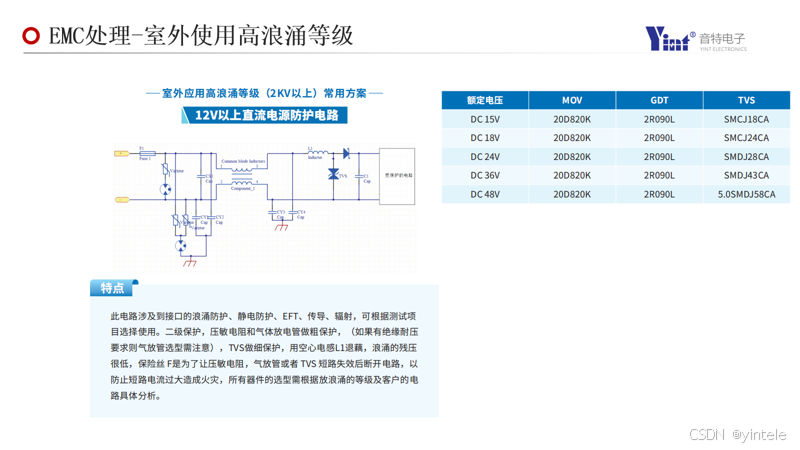
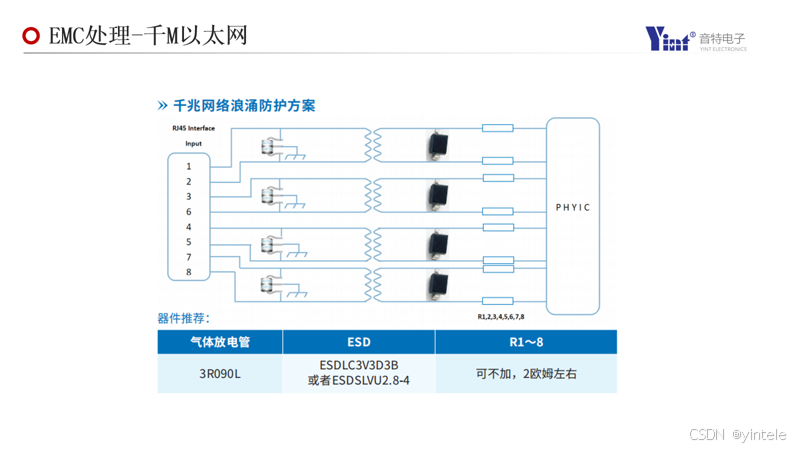
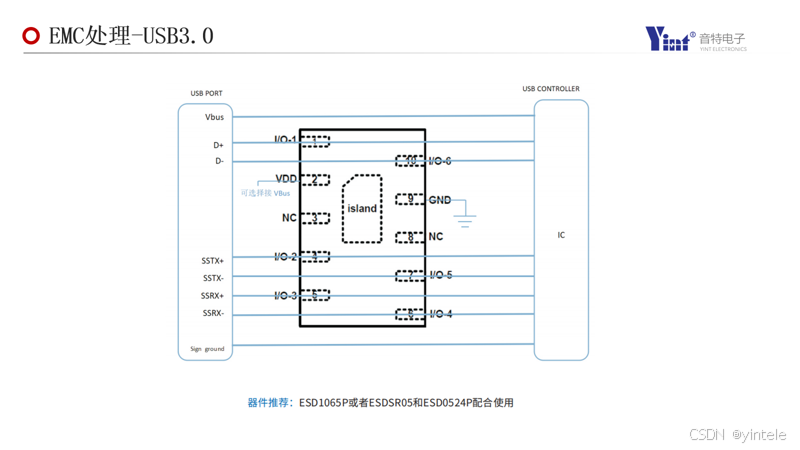
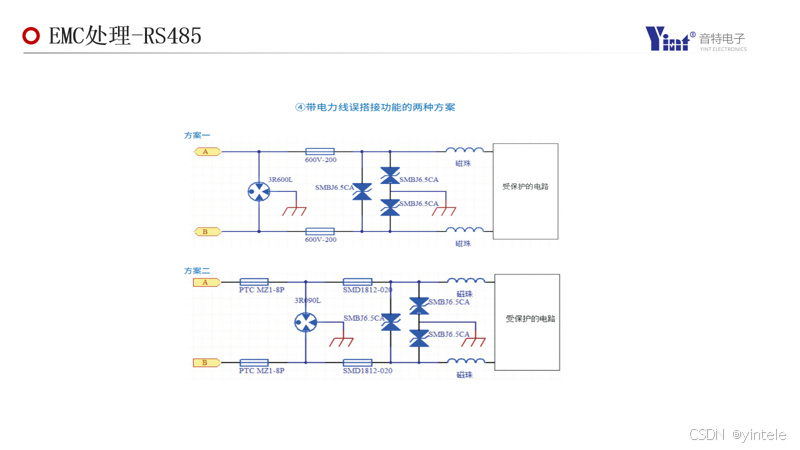
接口EMC的处理:
欢迎技术探讨:sales@yint.com.cn


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









