






扫地机器人 基于stm32f103ze扫地机器人程序,基于整点原子精英版例程修改。
本产品主要实现的是机器人自动弓字形前进,遇到障碍物避障并继续,WiFi控制整个过程,同时可一键回到初始位置。
步进电机+超声波避障+弓字形行进+WIFI控制+一建启动一建回到初始位置。
包含的电子资料见图(不含实物)。
YID:6130645116038619
ShenDreaming

基于stm32f103ze的扫地机器人程序,是一项基于整点原子精英版的例程修改。该程序旨在实现机器人的自动弓字形前进、遇到障碍物时的避障,并能通过WiFi进行控制,同时还能一键回到初始位置。
在该程序中,使用了步进电机、超声波避障、弓字形行进、WiFi控制和一键启动一键回到初始位置等技术。通过这些技术的应用,扫地机器人可以实现自主行走与避障的功能,并可以通过WiFi远程控制,方便用户对机器人进行操作。
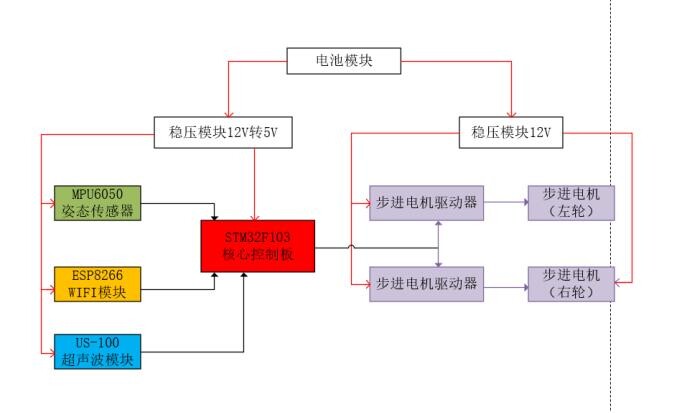
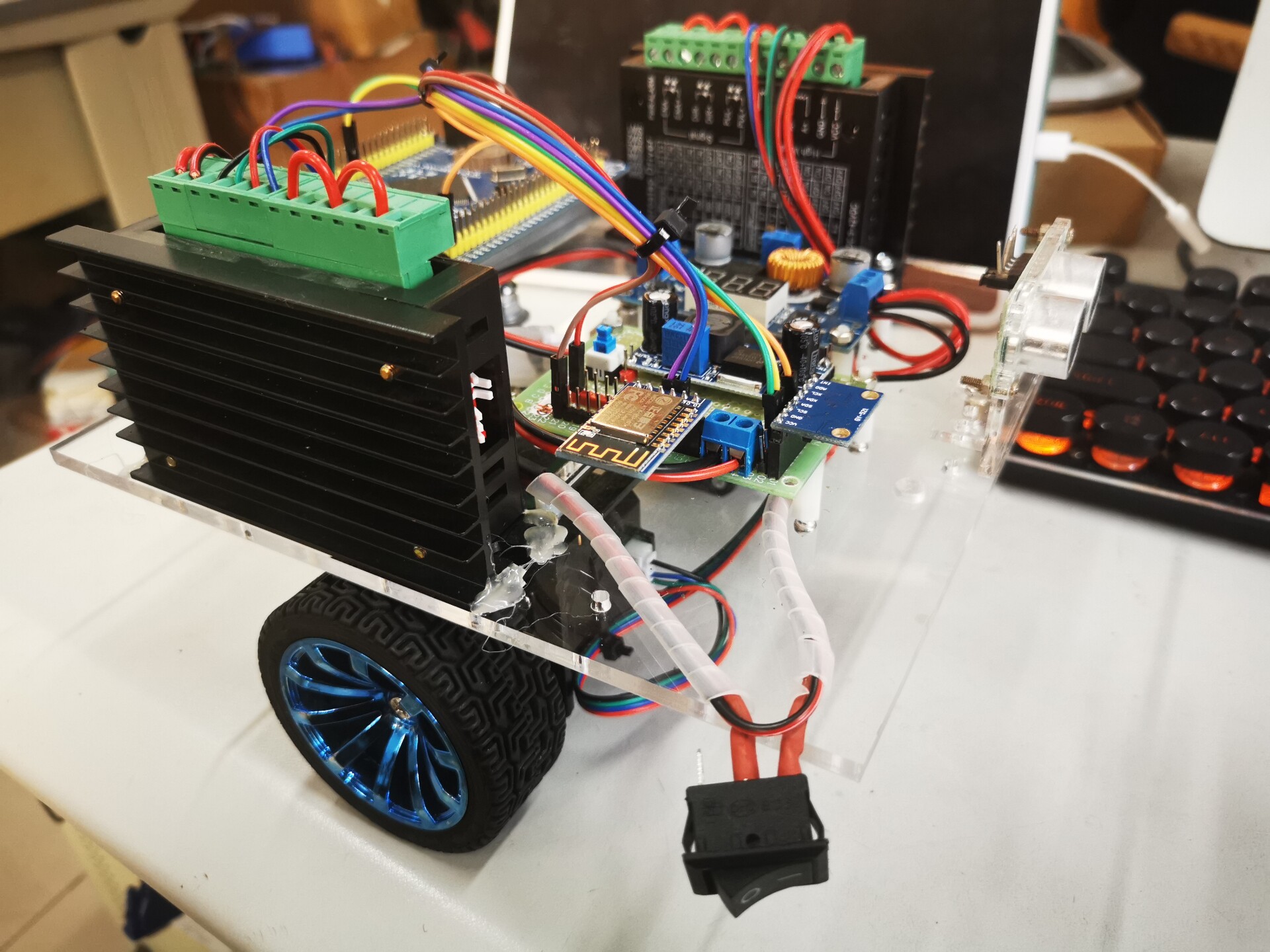
在硬件方面,该程序使用了stm32f103ze作为主控芯片,并搭配了步进电机和超声波传感器等硬件设备。步进电机可以提供机器人的动力,超声波传感器则可以实时监测周围的障碍物情况。通过这些硬件设备的协同工作,机器人可以根据超声波传感器的反馈信息来调整行进方向,从而实现避障功能。
在软件方面,该程序采用了基于整点原子精英版的例程进行修改。通过对例程的修改和优化,使得机器人可以实现自动弓字形前进的步骤。在前进过程中,机器人会持续地监测超声波传感器返回的距离信息,一旦检测到障碍物,机器人会立即停下来并进行避障操作,然后继续前进。同时,用户可以通过WiFi控制机器人的行走方向和速度,实现远程控制的功能。此外,机器人还具备一键回到初始位置的功能,用户只需按下相应按钮,机器人就会自动返回初始位置。
总结来说,基于stm32f103ze的扫地机器人程序是一个集自动弓字形前进、遇到障碍物避障、WiFi控制和一键回到初始位置等功能于一体的智能设备。通过该程序的运行,机器人可以实现自主行走与避障,并可以通过WiFi进行远程控制,为用户提供了更加便捷和智能化的使用体验。
注意:以上内容仅为模拟生成的文章,仅供参考。实际写作时,建议根据实际情况进行具体阐述和论证。
【相关代码,程序地址】:http://lanzoup.cn/645116038619.html















 168
168











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









