





四旋翼无人机位置姿态控制
四旋翼无人机仿真
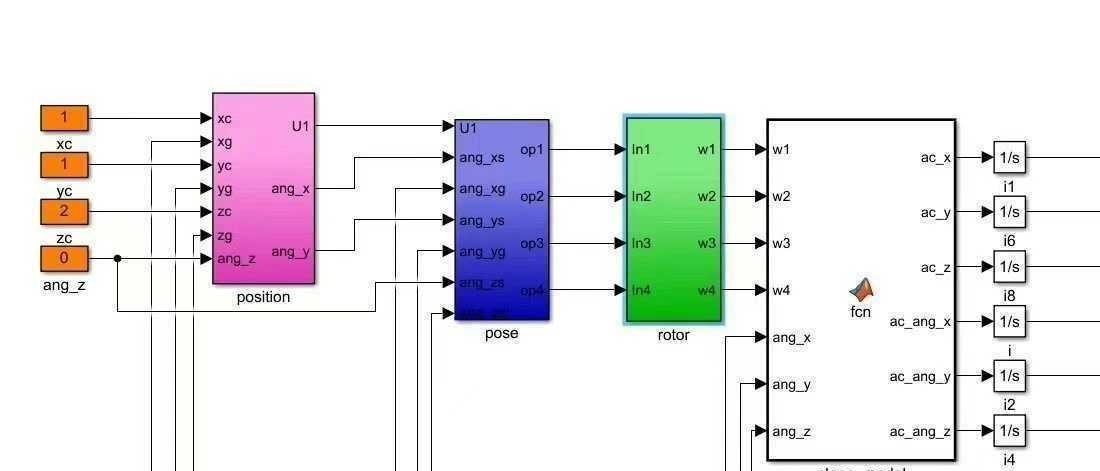
四旋翼无人机动力学模型
包含力方程组与力矩方程组
级联PID控制器
内环姿态环,外环位置环。
有参考文献,很详细,简洁易懂。
有报告文档直接用
ID:319739868931262
君君86
相关的代码,程序地址如下:http://lanzoup.cn/739868931262.html

四旋翼无人机位置姿态控制
四旋翼无人机仿真
四旋翼无人机动力学模型
包含力方程组与力矩方程组
级联PID控制器
内环姿态环,外环位置环。
有参考文献,很详细,简洁易懂。
有报告文档直接用
ID:319739868931262
君君86
相关的代码,程序地址如下:http://lanzoup.cn/739868931262.html
 268
268

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言

























