







 本文详细介绍了OpenMV中常用的OV7725、OV2640、OV5640、OV9650、MT9V034等镜头的特性,包括像素、帧率和适用场景。镜头焦距对图像大小和远近有直接影响,标准镜头和广角镜头各有畸变特点。此外,还讨论了镜头畸变校正、滤光片的作用以及像素和帧率的概念。在选择镜头时,需综合考虑应用场景、帧率需求和图像质量。
本文详细介绍了OpenMV中常用的OV7725、OV2640、OV5640、OV9650、MT9V034等镜头的特性,包括像素、帧率和适用场景。镜头焦距对图像大小和远近有直接影响,标准镜头和广角镜头各有畸变特点。此外,还讨论了镜头畸变校正、滤光片的作用以及像素和帧率的概念。在选择镜头时,需综合考虑应用场景、帧率需求和图像质量。
openmv4系列2----镜头讨论
1.镜头的选择
openmv常见的使用的镜头有OV7725、OV2640、OV5640、OV9640、MT9V034这几种。
OV7725:是一款30W像素的摄像头模块,支持最大VGA分辨率输出,帧率最大可达60fps。能配置输出RAW RGB、RGB(GRB422、RGB565/RGB444)、YVA422这几种格式的视频流。通俗点讲:OV7725像素是30W,虽然像素低,但是帧率高,应用在颜色追踪等应用上效果不错。
OV9650:是一款130W像素的摄像头模块,支持最大SXGA分辨率输出,最高可达15fps。可以自动曝光、自增益、自白平衡等功能。支持灰度和RGB565数据输出。通俗点讲:OV7725像素是130W,像素效果比OV7725有很大的提升,实际识别效果适中,适合又有帧率需求,又有像素需求的场合。
OV2640:是一款200W像素的摄像头模块,支持最大UXGA分辨率输出,最高帧率为15fps;在SVGA可达30帧、在CIF格式可达60帧。支持图像任意缩放,支持灰度和RGB565/JPEG数据输出。通俗点讲:OV2640像素是200W,帧率一般,实际拍图,识别的效果非常好!适合慢速识别场合!
MT9V034:是一款支持全局快门的传感器模块,可完美为需要精确的视觉支持提供方便。该模块分为两款,一款为只支持灰度输出、另外一款支持彩色和灰度输出。在VGA/QVGA格式下能稳定90fps帧率输出。在QQVGA格式下200fps帧率输出、在QQQVGA格式下400fps帧率输出。通俗点讲:一般的镜头拍移动的物体会模糊。而快门镜头拍摄移动的物体非常清晰,不会模糊,再加上高帧率,不用多说了,这款镜头就是OpenMV4的压轴镜头!不论是灰度还是彩色镜头,效果都非常好!
OV5640:支持输出最大为500万像素的图像 (2592x1944分辨率),支持使用VGA时序输出图像数据,输出图像的数据格式支持YUV(422/420)、YCbCr422、RGB565以及JPEG格式,若直接输出JPEG格式的图像时可大大减少数据量,方便网络传输。它还可以对采集得的图像进行补偿,支持伽玛曲线、白平衡、饱和度、色度等基础处理。根据不同的分辨率配置,传感器输出图像数据的帧率从15-60帧可调,工作时功率在150mW-200mW之间。相较于OV7725,OV5640的像素提高非常大,但是帧率却要比OV7725慢很多。
2.镜头的焦距
因为图像是通过镜头的光学折射,照到感光元件上的。那么镜头就决定了,整个画面的大小和远近。一个最重要的参数就是焦距。
镜头焦距:是指镜头光学后主点到焦点的距离,是镜头的重要性能指标。镜头焦距的长短决定着拍摄的成像大小,视场角大小,景深大小和画面的透视强弱。当对同一距离远的同一个被摄目标拍摄时,镜头焦距长的所成的象大,镜头焦距短的所成的象小。注意焦距越长,视角越小。
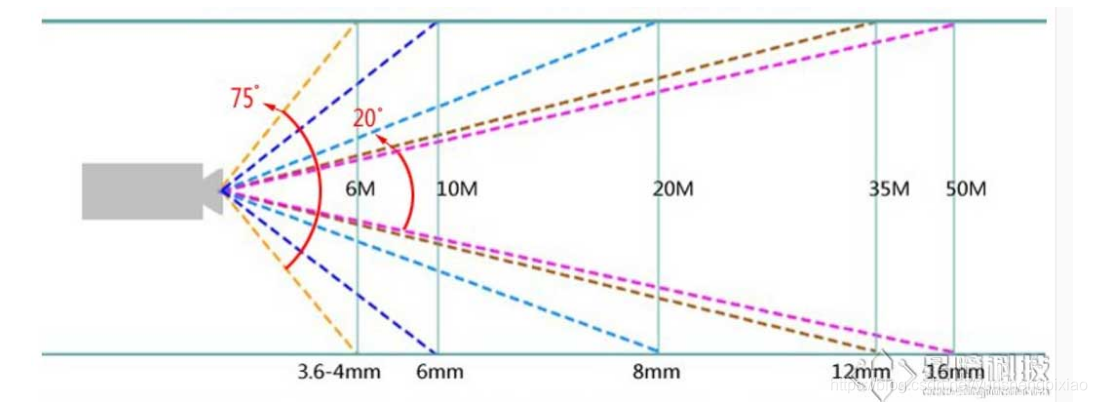
- 标准镜头通常是指焦距在40至55毫米之间的摄影镜头,标准镜头所表现的景物的透视与目视比较接近。 它是所有镜头中最基本的一种摄影镜头。
- 广角镜头是一种焦距短于标准镜头、视角大于标准镜头、焦距长于鱼眼镜头、视角小于鱼眼镜头的摄影镜。广角镜头焦距很短,视角较宽,而景深却很深,比较适合拍摄较大场景的照片,如建筑、风景等题材。
在我的理解范畴内,那种镜头平面是平的的就是标准镜头,镜头平面向上突起就是广角镜头。
百度百科 :
镜头分为广角镜头(其中包含广角镜头、超广角镜头、鱼眼镜头)、标准镜头、中焦镜头、中长焦镜头、长焦镜头。广角镜头焦距短,视角宽,景深大。相比标准镜头,广角镜头能够容纳更大的视角。相比长焦镜头,广角镜头能够拍摄更为清晰的画面,这就是景深。拍风景为什么要用广角镜头,因为广角镜头景深大,适当缩小光圈可以非常容易的做到拍摄清晰锐利的画面。而长焦镜头,或者大光圈的标准镜头,景深很小,能做到虚化背景以突出主体,但是带来的问题是,一味的虚化背景,主体也很容易模糊。广角镜头和长焦镜头都有画面变形,我们称为畸变,广角镜头的畸变是筒形的,即看起来向外凸出,而长焦镜头的畸变是枕形的,即看起来向内压缩。
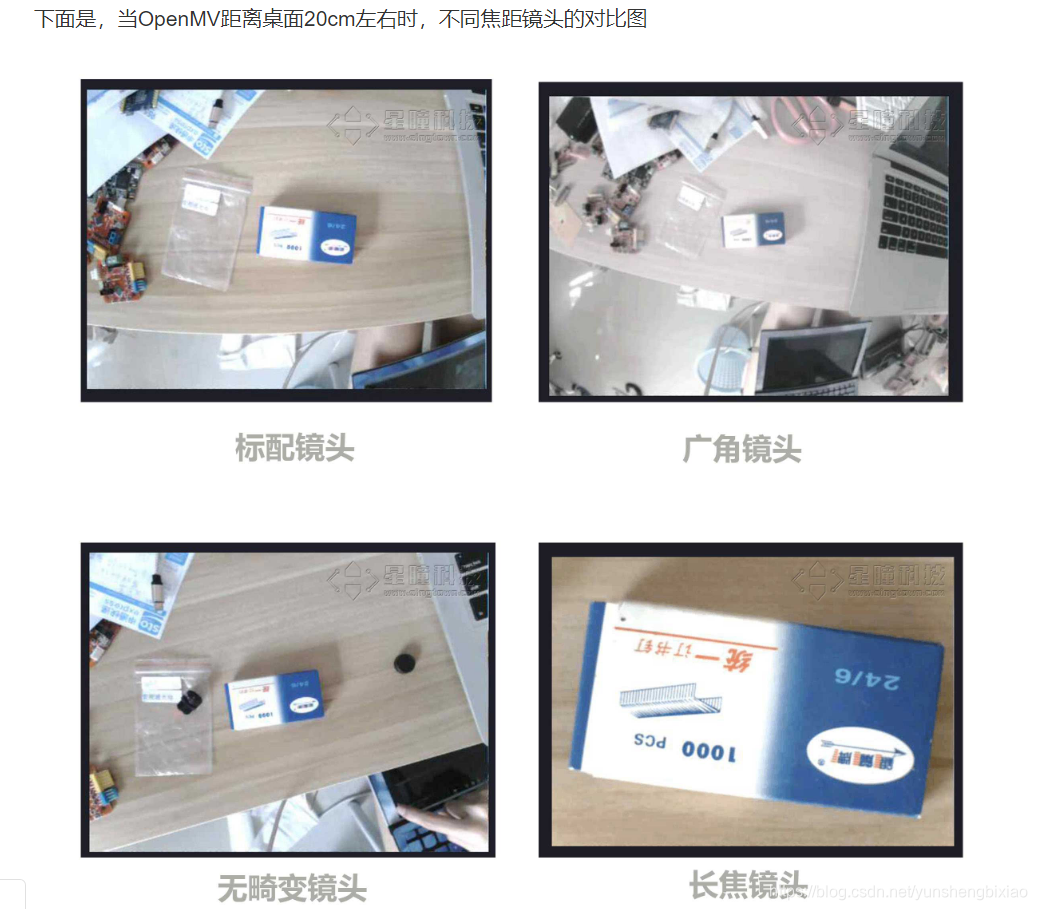
可见:无论是标准镜头还是广角镜头都会产生畸变,另外重要一点就是长焦镜头对远处的物体拍摄的效果非常好。
3.镜头的畸变
因为光学原理,在感光芯片上不同的位置,与镜头的距离不同的,简单说就是近大远小,所以在边缘会出现鱼眼效果(桶型畸变)。为了解决这个问题,可以在代码中使用算法来矫正畸变。
注:OpenMV中使用image.lens_corr(1.8)来矫正2.8mm焦距的镜头。也可以直接使用无畸变镜头。无畸变镜头加入了额外的矫正透镜部分,价格自然会高不少。
广角镜头和长焦镜头都有画面变形,我们称为畸变,广角镜头的畸变是筒形的,即看起来向外凸出,而长焦镜头的畸变是枕形的,即看起来向内压缩。
4.镜头的滤片
我们知道,不同颜色的光,是波长不一样。在正常环境中,除了可见光,还有很多红外光,在夜视中,用的就是红外光。
在正常颜色应用中,是不需要红外光的,因为红外光也会使感光元件受到反应,就使得整个画面泛白。所以我们在镜头上放一个只能通过波长650nm以内的滤光片,就把红外光截止了。但是,红外夜视摄像头就会用到红外光。
5.像素和分辨率
像素:感光元件是有很多个感光点构成的,比如有640x480个点,每个点就是一个像素,把每个点的像素收集整理起来,就是一副图片,那么这张图片的分辨率就是 640x480。玩过显示屏就知道这个概念。
6.帧率
帧率(FPS)就是每秒钟处理的图片数量,帧率超过20帧正常人就感觉不到卡顿了,一般在机器视觉中帧率是一个非常重要的参数,它决定了图像处理的实时性,高帧率也是非常考验单片机性能的。当然,如果用在机器上,帧率是越高越好。
7.光源的选择
如果你的机器是在工业上,或者24小时长时间运行的设备,保持一个稳定的光源是至关重要的,尤其在颜色算法中。亮度一变,整个颜色的值会变化的很大!

















 5260
5260

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









