







3--产品描述
本章中
-
型号概要
-
产品视图
-
交换范围
-
可选的附件
-
可命令元素
-
固件的重要组件
-
ID芯片探测
-
轴A和B的操作参数
-
Hexapod的运动
-
通过EtherCAT接口发送命令
-
通信接口
-
PC软件的概要
3.1 型号概要
C-887 hexapod控制器可以获取以下版本:
| 型号 | 描述 |
| C-887.52 | 用于Hexapods的6轴控制器,TCP/IP, RS-232,设备,incl,台式设备,两个附加轴的控制 |
| C-887.521 | 用于Hexapods的5轴控制器,TCP/IP, RS-232,设备,incl,台式设备,两个附加轴的控制,模拟输入 |
| C-887.522 | 用于Hexapods的5轴控制器,TCP/IP, RS-232,设备,incl,台式设备,两个附加轴的控制,运动停止 |
| C-887.523 | 用于Hexapods的5轴控制器,TCP/IP, RS-232,设备,incl,台式设备,两个附加轴的控制,运动停止,模拟输入 |
| C-887.53 | 用于Hexapods的5轴控制器,TCP/IP, RS-232,设备,incl,台式设备,两个附加轴的控制,EtherCAT接口 |
| C-887.531 | 用于Hexapods的5轴控制器,TCP/IP, RS-232,设备,incl,台式设备,两个附加轴的控制,EtherCAT接口,模拟输入 |
| C-887.532 | 用于Hexapods的5轴控制器,TCP/IP, RS-232,设备,incl,台式设备,两个附加轴的控制,EtherCAT接口,运动停止 |
| C-887.533 | 用于Hexapods的5轴控制器,TCP/IP, RS-232,设备,incl,台式设备,两个附加轴的控制,EtherCAT接口,运动停止,模拟输入 |
信息:从序列号121017873起,C-887也支持使用BiSS协议用于数据传输的hexapod microrobots。
3.2 产品视图
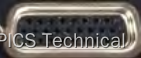
3.2.1 前面板
图1:C-887.523前面板;见其它型号上操作元素可用性的表格
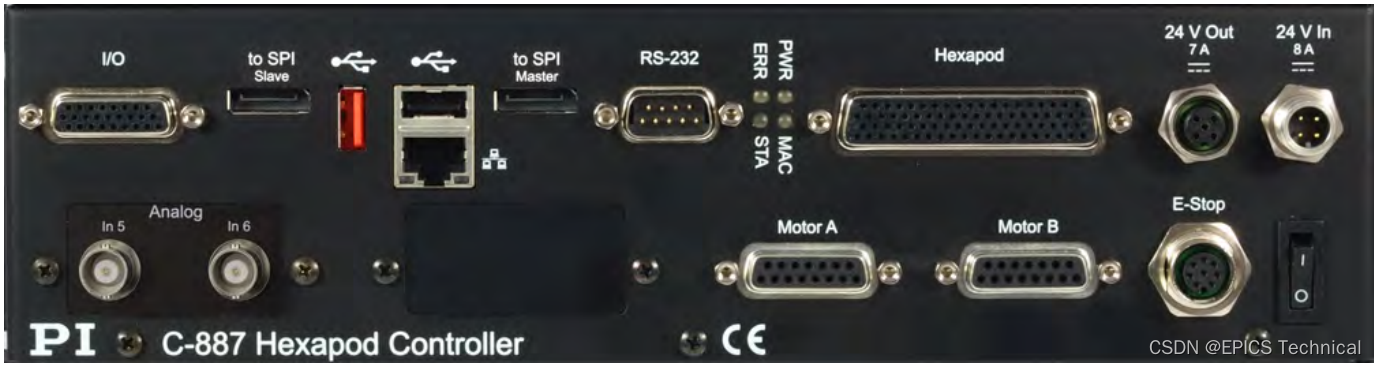
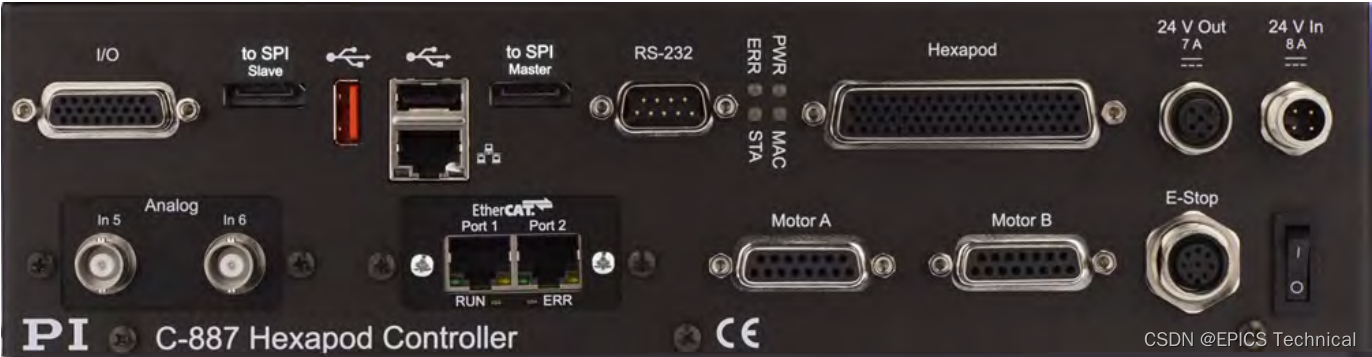
图2:C-887.533前面板;见其它型号上操作元素可用性的表格
| 标签 | 类型 | 功能 |
| I/O | HD D-Sub 26(f)
| 数字输入/输出:
模拟输入(多功能) |
| To SPI Salve | DisplayPort
| 用于一个SPI从站的接头。仅限PI内部目的。 |
| USB Type A,用于高插入力和拉力
| 用于连接C-887.MC2或C-887.MC手动控制单元的USB接口 | |
| USB Type A,
| 用于连接外围设备的USB接口 | |
| RJ45 socket
| 通过TCP/IP的网络连接 | |
| to SPI Master | DisplayPort
| 用于一个SPI主站的接头。仅限于PI内部目的 |
| RS-232 | D-sub 9(m)
| 连接PC的串口 |
| ERR | LED red/off
| 错误指示灯:
|
| PWR | LED Green/off
| 电源:
|
| STA | LED Green/off
| 状态:
|
| MAC | LED green/red/off
| 宏:
错误代码可以用MAC ERR?命令。查询重置错误代码为0并且关闭这个LED。
|
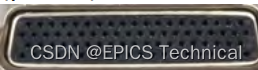
| Hexapod | HD D-sub 78(f)
| Hexapod和控制器之间数据传输的接头。 从序列号121017873起,C-887也支持通过BiSS协议的数据传输。 |
| 24V Out 7A | 4-pole M12 socket (f)
| Hexapod C-887.522,.523,.533的电源:用于hexapod的24V输出必须通过E-Stop插座被激活。 |
| 24V In 8A | 4-pin M12 panel plug (m)
| C-887供电电压的接头 当hexapod连接到控制器的24V Out 7A插座时,控制器的供电电压也用于这个hexapod。 |
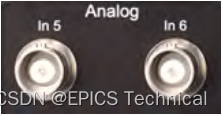
| Analog In 5 In 6 | C-887.521, C-887.523, .531, .533: BNC插座
| 仅限C-887.521,.523, .531, .533: 模拟输入-5V到5V。 参考”模拟输入说明” |
| C-887.52, C-887.522, .53, .532: 用空板覆盖。 | ||
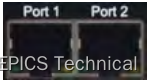
 | C-887.53x**: 带绿色和黄色LED的RJ45插座
| 仅限C-887.53x**: 端口1(左):EtherCAT主站接头。 端口2(右):下个EtherCAT从站的接头。 绿色LED:
黄色LED:不使用 |
 | C-887.53x**: LED green/off
| 仅C-887.53x**: EtherCAT从站的通信状态:
|
| C-887.52x*: 被空板覆盖 | ||
 | C-887.53x**: LED 红色/熄灭
| 仅C-887.53x**: EtherCAT从站的通信状态:
|
 | D-Sub 15(f)
| 用于定位器的两个接头。仅用于使用DC电机和集成电机驱动的定位器。
|
| C-887.522, .523, .532, .533: 8孔 M12插座(f)
| 仅限C-887.522, .523, .532, .533: 外部硬件(例如:按钮或开关)的接头:这个连接控制一个带N/O触点的内部继电器,它使得hexapod的24V输出失效或者生效(24V Out 7A 插座)。 如果不使用外部硬件,C887B0038短接插头(包含在交换范围内)必须被连接使得24V输出生效。 | |
| C-887.52, .521, .53, .531: 由盲插头覆盖 | ||
| - | 波动开关:
| 开关:
如果hexapod连接了控制器的24V Out 7A插座,hexapod也被启动/关闭。 C-887.522, .523, 532, .533:必须通过E-Stop插座使得用于hexapod的24V输出生效。 |







*C-887.52x代表C-887.52, .521, .522, .523
**C-887.53x代表C-887.53, .531, .532, .533
3.2.2 铭牌
| 标签 | 功能 |
| 数据矩阵码(示例;包含序列号) | |
| 产品名(示例),在点号后面的字符指型号 | |
 | 厂家标识 |
 | 序列号(示例),每个C-887一个。(从左起)每个位置的含义:1=内部信息,2和3=生成年份,4到9=连续号码 |
 | 原产国 |
| “注意手册”提醒标识 | |
 | 老设备处理 |
| CE合格标志 | |
| 厂家地址(网站) |
3.2.3 接地连接

图3:C-887控制器,接地连接
| 标签 | 类型 | 功能 |
 | M4螺母 | 接地连接 如果需要电位平衡,C-887可以连接接地系统 |
3.3 交货范围
| 物品ID | 组件 |
| C-887 | 根据你订单的Hexapod控制器 |
| C-815.563 | 交叉网线 |
| C-815.553 | 直连网线 |
| C-815.34 | 用于通过RS-232连接PC的 |
| C-501.24180M12 | 零调制解调器电缆 |
| 3763 | 电源线 |
| C-990.CD1 | 用于数字电子设备的PI软件CD |
| MS247EK | Hexapod系统的简短介绍 |
| 仅用于型号C-887.522, C-887.523, C-887.532, C-887.554 | |
| C887B0038 | 用于E-Stop插座的短接插头
|

3.4 可选配件
3.4.1 概要
| 订单号 | 描述 |
| C-887.5xxx | 不同的hexapod线缆套件 |
| C-887.MC2 |
控制器需要至少固件组件FW版本2.7.1.1,要于C-887.MC2控制单元兼容。如果需要,更新控制器的固件。 先前型号C-887.MC不再可用,然而,控制器将仍然支持它。 |
| C-887.VM1 |
|
| C-887.MSB | 运动停止按钮。用于带有E-Stop插座的C-887型号。 详细,见”使用E-Stop插座”。
|
| F-721.PM1 | 光功率计,400-1550 nm波长范围,1 mA输入电流,20kHz信号带宽,指数输出±5V,台式设备,包括电源适配器 用于带有Analog In 5和In 6 BNC插座的C-887 详细参考光功率计(MP165E)的手册 |
| F-712.IRP1 | 高分辨率光功率计,带指数输出信号,600到1700nm波长范围,输入功率230pW到1.3mW,6kHz信号带宽,指数输出电压0.1到1.6V,单通道台式设备。 用于带有Analog In 5和In 6 BNC插座的C-887型号 详细参考光功率计(MP192E)的手册 |
| P-FMP-GSM | 梯度搜索模式。固件功能允许在多个运动中为梯度搜索同时执行快速对齐例程。 梯度搜索默认对带H-811微型hexapod机器人的所有hexapod系统可用。 有关梯度搜索详情,见”快速多通道光子对齐(FMPA)”手册。 |
| L-xxx M-xxx | 安装了DC电机和PWM放大器的PI定位器。 根据要求,有关合适型号的信息 |

要下单,联系我们的客服部门。
3.4.2 Hexapod线缆
有关用于特性hexapod型号的线缆的适用性,参考”线缆规格”。
| Hexapods的数据传输线缆,拖链兼容,HD D-sub 78 m/f | |
| 订货号 | 数据传输线缆,可获取的长度 |
| C-815.82D02 | 2m |
| C-815.82D03 | 3m |
| C-815.82D05 | 5m |
| C-815.82D07 | 7.5m |
| C-815.82D10 | 10m |
| C-815.82D20 | 20m |
| Hexapods电源线,拖链兼容,M12 m/f angled | |
| 订货号 | 电源线,可获取的长度 |
| C-815.82P02A | 2m |
| C-815.82P03A | 3m |
| C-815.82P05A | 5m |
| C-815.82P07A | 7.5m |
| C-815.82P10A | 10m |
| C-815.82P20A | 20m |
| Hexapods电源线,拖链兼容,M12 m/f straight | |
| 订货号 | 电源线,可获取的长度 |
| C-815.82P02E | 2m |
| C-815.82P03E | 3m |
| C-815.82P05E | 5m |
| C-815.82P07E | 7.5m |
| C-815.82P10E | 10m |
| C-815.82P20E | 20m |
![]() 要下单,联系我们的客服部门。
要下单,联系我们的客服部门。
3.4.3 C-887.VM1 PIVeriMove作为碰撞检查的一个选择
用于碰撞检查的PIVeriMove hexapod软件,在订货号C-887.VM1下可选,提供以下功能:
- 在PC上模拟hexapod的摆放以及其周边环境。
- 传输在PC上创建的配置到C-887.
使用创建的配置文件,为任何所需目标位置在以下组之间检查它碰撞是否发生:
- 包含hexapod基半的周边环境。
- Hexapod structs
信息:
在知道机械的绝对位置(用增量传感器的hexapod:在成功参考移动后)根据用PIVeriMove创建的配置,C-887才执行碰撞检查。
用于碰撞检查的PIVeriMove hexapod软件安装在一台PC上并且在那里通过一个证书激活。有关安装和使用的更多信息,参考C887T0002用户手册(在PIVeriMove交付范围中包含)。
3.5 可命令元素
以下表格包含可以用GCS命令进行指令控制的元素。
信息
C-887.53, .531,.532和.533型号安装了一个EtherCAT接口。通过EtherCAT接口控制hexapod时,根据CiA402驱动描述,它被用作了一个多轴设备。EtherCAT主站控制hexapod运动平台的逻辑轴X, Y, Z, U, V, W。
进一步信息,见”通过EtherCAT接口控制”。
| 元素 | 数目 | 标识符 | 描述 |
| 逻辑轴 | 6 | X, Y, Z, U, V, W | 逻辑轴X到W在C-887固件中再现hexapod运动平台的平移和转动。 平移轴:X,Y和Z 转动轴:U, V和W |
| 逻辑轴 | 2 | A, B | 逻辑轴A和B在C-887固件中再现其它定位器的运动 |
| Hexapod struct | 6 | 1到6 | Hexapod structs对于运动命令不可访问,但可以为诊断目的,用数据记录器选作进行记录的数据源,也见DRC和HDR?。 |
| 输入信号通道 | 最大6 | 1到6 | 模拟输入通道:按以下顺序向输入信号通道分配标识符:
TAC?命令获取安装的模拟输入数目 |
| 数字输出 | 4 | 1到4 | 1到4标识I/O插座的数字输出线路1到4 DIO命令设置数字输出线路状态 |
| 数字输入 | 4 | 1到4 | 1到4标识I/O插座的数字输入线路1到4 DIO?命令获取数字输入线路状态 |
| 波生成器 | 8 | 1到8 | 每个波生成器被永久分配给了一个逻辑轴: 机械 hexapod 轴 X Y Z U V W 波生成器 1 2 3 4 5 6 机械 其它轴 轴 A B 波生成器 7 8 |
| 波表格 | 100 | 1到100 | 波表格包含波生成器输出的波形的保存数据(10.000.000个点)。 Number Of Waves参数的值(ID 0x1300010A)表示波表格的数目。 |
| 坐标系 | 无限制 | 当坐标系被定义时,分配名称。 | 使用控制器,可以定义自定义坐标系,并用来替代默认坐标系。更多信息,见”Hexapod运动”。 坐标系命名规则: 允许的字符: 1234567890ABCDEFGHIJKLMNOPQRSTUVWXYZ_ 字符数目不受限制。 名称以一个字母字符开始。保留名称,它们不可以用于定义,复制或删除:HEXAPOD, PI_LEVELLING, PI_BASE, ZERO, 0, NULL, XML, KLF, KLF(USER), KLF(PI), KLD, KLD(USER), KLD(PI), KSB, KSB(USER), KSB(PI), KSD, KSF, KST, KSW 每个名称只存在一个。任何未在使用的已有坐标系在一个相同名称坐标系被创建时,它被重写(定义,产生一个副本)。 |
| 快速对齐例程 | 100 | 当定义例程时,分配这个名称。 | 快速对齐例程包含用FDR和FDG命令定义的所有例程。 快速对齐例程名称规则: 由字母数字字符组成的字符串。不允许空白和特殊字符。你可以在”快速多通道光子对齐(FMPA)”文档(E712T0016)中找到更多信息。 |
| 数据记录器表 | 16 | 1到16 | 数据记录器表包含记录的数据。C-887有16个数据记录器表(用TNR?查询),每个表最多262144个数据点(默认:每个表8192数据点)。 可以用Data Recorder Pointer Per Table参数(ID 0x16000201)设置每个数据记录器表的点数 |
| 完整系统 | 1 | 1 | C-887作为整个系统 |
3.6 固件的重要组件
C-887的固件提供了以下功能单元:
| 固件组件 | 描述 |
| ASCII命令 | 可以用于PI通用命令集(GCS; 版本2.0)管理与C-887的通信。GCS时独立于硬件(控制器,连接的定位器)。 GCS使用的示例:
你可以在”命令概要”章节找到可用命令列表。 |
| 配置文件, 定位器,数据库,参数 | 用于适配C-887的设置,例如,机械属性或者使用的通信接口由以下决定:
|
| 命令级别 | 命令的可用性和对参数的写权限是由命令级别决定的。当前命令级别可以用CCL命令更改。这需要输入一个密码。更多信息见”适配设置”。 |
| 数据记录器 | C-887包含一个实时数据记录器。这可以记录来自不同数据源(例如,逻辑轴,输入信号通道)的不同输入和输出信号(例如,当前位置,指令位置)。 |
| 波生成器 | 每个逻辑轴可以受控于输出波形的波生成器控制。波生成器尤其适合动态应用,例如,在这些应用中执行轴的周期运动。 |
| 宏 | C-887可以保存宏。通过宏函数定义和永远存储命令序列。可以定义一个启动宏,它在每次启动或重启C-887时运行。这简化了没有连接PC的操作。在”控制宏”章节中找到更多信息。 |
用工具可以更细固件。
3.7 ID芯片探测
Hexapod有一个包含了有关hexapod类型,它的序列号以及生产日期数据的ID芯片。当启动或者重启控制器时,从ID芯片装载数据。取决于装载的数据,控制维持当前配置或者按照一个新配置。
为了简单替代,所有标准hexapods的配置数据在工厂被存储在每个标准控制器(例如,集合数据和控制参数)。如果hexapod和控制器一起配送,自定义hexapods的配置数据仅被存储在控制器上,或者在控制器配送前,相应地通知了PI。
取决于从ID芯片装载的数据,在启动或重启控制器后,它行为如下:
- 如果从ID芯片装载的hexapod类型和序列号与保存在控制器中的数据一致,控制器维持当前配置。系统立即准备好操作。
- 如果从ID芯片装载的hexapod和/或序列号不同于保存在控制器中的数据:
- 如果hexapod类型相同但序列号不同,控制器为这个类型安装标准配置文件。
- 如果hexapod类型不同,控制器安装一个匹配这个新hexapod类型的新配置文件
需要重启控制器来激活安装的配置。
信息
ID芯片探测的应用注意:
- 在你替换连接的hexapod前,在PC上保存控制器的当前参数值。
- 仅在控制器关闭时,才连接hexapod。
- 当固件结束启动时,发送CST?命令检查通过重启控制器是否激活了安装的配置。当响应是”NOSTAGE”时,重启是必须的。可以用RBT命令重启控制器。
- 发送ERR?命令检查配置是否成功被激活。如果响应包含了错误代码233或211,新Hexapod的配置没有在控制器中(例如可能,对于自定义hexapods或新标准hexapod)。为了接收一个合适的配置文件,联系我们的客服部门。新配置文件的安装,见”更新固件和配置文件”。
- 发送VER?命令检查在ID芯片上保存的hexapod类型,序列号以及制造日期信息。例如,响应:
3.8 轴A和B的操作参数
C-887的电机A和电机B插座(D-sub 15 (f))是为了连接带有DC电机和集成电机驱动器的定位器。
如果在hexapod系统被发货前,你告诉了PI有关使用的定位器类型,PI将根据你的订单配置C-887,因而相应的定位器类型被分配给了C-887的轴A和B:
- 如果你仅订购了一个定位器,相应类型被分配给了轴A。
- 如果你订购了两个定位器,相应类型按字母升序顺序被分配给了轴A和B,例如M-403.1DG给A而M-403.2PD给B;M414.1PD给A和M-511.DD1给B。
如果轴A和B定位器类型设为了NOSTAGE,它们是不生效的并且将在PC软件中不可见(例如,在PIMikroMove)。
要更改定位器类型的分配,或者使用PI的PC软件(例如,PIMikroMove,见”启动运动”)或者发送CST命令。
当分配一个新定位器类型,它的操作参数将从两个以下定位器数据库被装载:
| 文件名 | PISTAGES3.DB | PIStages2.dat |
| 内存位置 | PC | C-887 |
| 描述 | 发货包括来自PI和PI miCos的标准定位器的标准定位器的参数设置;在安装软件时,自动保存到PC。可以创建,编辑和保存新参数设置。 | 包括来自PI和PI miCos的标准定位器的参数设置。 如果你想要更新C-887中PIStages2.dat,联系我们的客服部门。 |
| 数据库使用必要条件 | 必须实现所有条件:
| 满足至少一个条件被实现:
|
为了使用PISTAGE3.DB数据库,推荐更新固件和PC软件版本。PIStages2.dat仅出于兼容性原因才提供。
在你hexapod系统中使用的版本可以在VER?命令响应中找到。有关定位器数据库的进一步信息可以在PIStage3Editor和GCS 2.0 DLL编程库手册中找到。
3.9 hexapod运动
3.9.1 介绍
C-887 hexapod控制器用于以非常高定位精度在六个自由度控制hexapod。Hexapod在X,Y和Z轴方向提供线性运动以及绕这三个轴中每一个轴转动。
C-887用闭环操作驱动6个hexapod structs的电机。Hexapod structs运载运动平台并且移动它到指定位置。
定位命令使用笛卡尔坐标。在平台移动到指定位置前,C-887转换这些为hexapod struts的各自位置和速度。
3.9.2 行程范围和软限位
在hexapod平台沿指定方向矢量移动时,使用TRA?查询可以被指令控制的最大绝对值。从当前位置计算最大的可命令位置,并且仅在hexapod平台没有移动时才能被查询。在计算中所包含的是软限位(NLM, PLM, SSL)和用SPI(见SPI)定义到的轴心点(如果它被生效的操作坐标系使用)的当前设置。
信息
使用TRA?在内部位置计算中不可避免近似误差
如果用TRA?指定的方向矢量移动平台接近其中一个行程限位,由于近似,响应可能表示一个位置不能够被达到。命令这样一个位置出错并且产生错误代码7(“位置超限”)。因而,你可以用一个因子限制对TRA?的响应,使得显示仅能够实际被命令的位置。
- 使用SPA设置Reduction Factor for TRA? Response参数(0x19006000)为一个0和1之间的合适值。
如果允许当前正在被使用的坐标系,你可以用TMN?和TMX?查询各自轴的最小和最大可命令位置。注意X, Y, Z, U, V, W的行程值是相互依赖的。取决于hexapod运动平台的当前位置,轴X, Y, Z, U, V, W的实时可用行程范围会小于在TMN?和TMX?响应中显示的行程范围。在满足以下条件时,对TMN?和TMX?的响应才对应一个轴的实际可用行程范围。
- 所有其它轴处于0位置。
- 工厂设置坐标系有效。
- 轴心点坐标的默认设置应用。
使用VMO?查询是否一个目标位置是否可被达到。用PUN?查询位置的物理单位。
3.9.3 支持的运动类型
C-887支持以下位置类型:
| 运动类型 | 触发运动 |
| 参考移动 | FRF 用于hexapod运动平台轴(X, Y, Z, U, V, W)的手动控制单元(C887.MC2或C-887.MC) |
| 仅限EtherCAT接口的C-887型号: 根据CiA402驱动器配置文件,寻零模式。 Configure Command Mode参数(ID 0x19002000)需要值1=“External:EtherCAT”。进一步信息参考”通过EtherCAT接口的命令”。 | |
| 点到点运动;轮廓生成器创建动态轮廓 | MOV:移动到绝对目标位置。Trajectory Source参数(ID 0x19001900)必须有值0(默认)。 |
| STE,IMP:启动跳转或脉冲,有数据记录 MVR:相对上个指令目标位置相对运动 MRT,MRW:在工具或工作坐标系中相对移动指定的轴。有关坐标系详情参考”术语定义”。 | |
| Hexapd运动平台(X, Y, U, V, W)轴的手动控制单元(C-887.MC2或C-887.MC)。控制单元的旋钮启动运动。可以增量转动旋钮。通过一步转动,启动运动由SST命令设置的步长。 | |
| 目标位置的反复转移 | 连续的MOV命令 Trajectory Source参数(ID 0x19001900)必须有值1=“Dynamics profile is determined by consecutive MOV commands”。(动态轮廓是由连续的MOV命令确定的) |
| 仅限有EtherCAT接口的C-887型号: 根据CiA402驱动器配置文件,反复同步位置(CSP)模式。 Configure Command Mode参数需要值1=“External: EtherCAT”。 进一步信息见”通过EtherCAT接口的命令”。 | |
| 波生成器 | WGO:启动/停止波生成器输出 |
| 快速对齐例程 | 你可以在”快速多通道光子对齐(FMPA)”文档(E712T0016)中找到进一步信息。 |
| 扫描过程 | AAP, FIO,FLM,FLS,FSA,FSC,FSM命令 |
信息
C-887可以以控制宏保存和运行命令序列。当一个宏正在C-887上运行时,通过C-887通信接口发送所有命令。通过命令接口接收到的宏内容和命令可以相互重写。
信息
对带增量传感器的轴,只能在成功参考移动后,运动才能被命令。(也称为”初始化”)。
在参考运动后hexapod轴的行为是由Behaviour After Reference Move(ID 0x07030401)和Target For Motion After Reference Move参数(ID 0x07030402)确定的。取决于参数值,平台的轴的轴可以自动被移动,例如,在参考移动后到指定位置。
- 参数值0x07030401=0:在参考移动后,这个轴留在参考位置。
- 参数值0x07030401=1:在参考移动后,轴移动到由参数0x07030402指定的绝对目标位置。
对带有绝对测量传感器的轴,不需要参考移动。然而,对于这些轴,仍然推荐FRF命令的使用。FRF对于带绝对测量传感器的轴不启动参考移动,但设置目标位置为当前位置值。以上描述的参数值也生效,因而例如,轴可以被移动到一个定义的”初始位置”。
信息
如果一个手动控制单元(C-887.MC2或C-887.MC)正在被使用:HID Device Button Mode参数(ID 0x0E001600)的值指定了”stop”和”reference move”按钮的行为。
- 参数值为0(默认):按钮触发各自动作。
- 参数值为1:按钮不触发任何操作。例如,当按钮的状态要在一个宏中被计算(用HIB?命令查询)时,这是个好办法。
可以用SPA命令更改参数的值和用WPA命令保存参数的值,见”适配设置”。
进一步信息参考手动控制单元文档。
3.9.4 用于点到点运动的轮廓生成器
对于点到点运动,C-887的轮廓生成器确定了动态轮廓。
信息
在点到点移动中,任何新运动命令设置目标位置为一个新值,并且这个运动平台立即在一个未定义路径上移动到这个新目标位置。
轮廓生成器的参数
| 参数 | 描述和可能值 |
| Path Control Step Size (mm) 0x19001504 | 用于计算平台动态轮廓线的步长。这个参数是写保护的,并且在发货前适配了系统的hexapod。 |
| Trajectory Velocity (Phys. Unit/s) 0x19001510 | Hexapod运动平台的速度。用VLS命令更改这个速度,重写易失性内存中这个参数值。 |
| Trajectory Acceleration (Phys. Unit/s2) 0x19001511 | Hexapod运动平台的加速度 |
| Trajectory Jerk (Phys. Unit/s3) 0x19001512 | Hexapod运动平台的Jerk |
| Trajectory Source 0x19001900 | 用于MOV命令的动态轮廓线的源 对于由MOV命令触发的点到点运动,这个参数必须设置未0(默认)。 |
用于轮廓生成器的命令
| 命令 | 语法 | 函数 |
| VLS | VLS <SystemVelocity> | 设置hexapod运动平台的速度。 受到Maximum System Velocity(Phys. Unit/s)参数(ID 0x19001500)和Minimum System Velocity(Phys. Unit/s)参数(ID 0x19001501)限制 |
检查由轮廓生成器创建的动态轮廓
当轮廓生成器为hexapod创建动态轮廓时,在每个运动启动前,检查运动平台是否可以实际达到计算的轮廓节点和指令的目标位置。如果一个节点或目标位置不能达到,不执行这个运动。检查以下:
- 通过TMN?和TMX?或TRA?查询目标位置是否超过了行程范围限制。
- 用SSL使得用NLM和PLM设置的软限位生效吗?,如果是,节点和目标位置是否超出这些软限位?
- 各自驱动器是否能够移动平台到所需的节点和指定的目标位置?
- 当用可选用的PIVeriMove hexapod软件在C-887中已经存储了用于碰撞避免的配置用于碰撞检查:在以下组之间发生碰撞吗?
- Hexapod的Incl. 基板周边
- Hexapod的驱动器。
- Hexapod incl.负载的运动平台
VMO?命令查询是否可以达到一个指定位置。
信息
如果虽然即使指令目标位置是允许的,但移动命令产生了错误代码7(“位置超限”),移动平台可能位于在行程范围限制外的位置。
- 如果hexapod安装了绝对测量传感器,为了能够命令运动平台回到一个允许的位置,临时使动态轮廓的自动检查失效。详细,参考”排错”。
3.9.5 目标位置反复传送
![]() 通过目标位置反复传送指定动态轮廓的选项:
通过目标位置反复传送指定动态轮廓的选项:
- 通过连续MOV命令说明。详见接下来参数和命令的描述。
- 仅带有EtherCAT接口的C-887型号:根据CiA402驱动器配置文件周期同步位置(CSP)模式。
更多信息,见”通过EtherCAT接口的命令”。
目标位置的周期转移
在目标位置的周期转移中,运动的加速/减速,速度和稳定性取决于以下因素:
- 目标位置值
- 循环时间的遵守
一个不合适动态轮廓的执行会使得hexapod倾斜。倾斜会损坏hexapod和/或固定到它的负载。
- 对于这些原因,在目标位置周期转移中观察以下:
- 由目标位置指定的路径必须至少两次连续可微分。
- 在动态轮廓执行中,hexapod的最大允许速度和加速度一定不能超过。
- 在运动中,要产生目标位置并且连续传输它们到C-887,推荐使用一个合适的程序。
- 如果你通过连续的MOV命令指定目标位置:使用C-887的缓存确认循环时间遵守:
- 在执行前在C-887缓存中存储动态轮廓。为此目的,使用SPA设置Trajectory Execution参数(ID 0x19001901)为值1。
- 为了缓存的合理使用,用SPA(默认=1)增加Threshold for Trajectory Execution参数(0x19001903)。
信息
推荐:当要运行的动态轮廓已知时,你应该使用波生成器作为连续MOV命令的替代。
通过连续MOV命令指定动态轮廓的参数
| 参数 | 描述并且可能的值 |
| Path Control Step Size (mm) 0x19001504 | 计算平台动态轮廓的步长。 这个参数是写保护的,并且在发货前适配了系统的hexapod。 为了避免倾斜hexapod,用连续MOV命令设置的目标位置之间距离只可以最大与参数0x19001504的值一样大。 |
| Trajectory Source 0x19001900 | 用于MOV命令的动态轮廓的源。 通过连续MOV命令,目标位置的周期传送,这个参数必须有值1。 |
| Trajectory Execution 0x19001901 | 动态轮廓的执行 确定如何执行由连续MOV命令定义的动态轮廓: 0=动态轮廓被立即执行(默认) 1=在执行前,在缓存中存储动态轮廓 仅在参数0x19001900有值1时,才计算这个参数。 |
| Maximum Number of Trajectory Points 0x19001902 | 动态轮廓点的最大数目 表明缓存的最大尺寸。 这个参数是写保护的,并且仅在参数0x19001900和0x19001901都有值1是,才被计算。 |
| Threshold for Trajectory Execution 0x19001903 | 执行动态轮廓的阈值 到在动态轮廓执行开始,确定多少动态轮廓点必须被存储在缓存中(通过连续的MOV命令)。 当参数0x00190019和0x19001901都有值1,这个参数才被计算。 |
| Current Number Threshold for Trajectory Execution | 显示在缓存中动态轮廓点的当前数目。 当动态轮廓是由轮廓生成器确定的,这个参数值总是0,否则由连续MOV命令定义的动态轮廓被立即执行。 这个参数是写保护的。 |
通过连续MOV命令指定动态轮廓的命令
| 命令 | 语法 | 功能 |
| MOV | MOV {<AxisID> <Position>} | 连续的MOV命令指定单个目标位置。其它运动命令和启动波生成器输出不被允许。 |
| SCT | SCT “T” <CycleTime> | 确定用于运行一个动态轮廓的周期时间 周期时间用于计算运动中速度,使得动态轮廓的指定点中每个点就在时间间隔结束时到达(可能的时间间隔兼容速度和加速度限制) |
| VLS | VLS <SystemVelocity> | 限制各自驱动的速度。 |
| #11 | #11 | 查询缓存的空闲内存空间,当0x19001900和0x19001901都有值1时,其内容确定hexapod的动态轮廓。 |
3.9.6 坐标系
Hexapod运动平台的位置显示,运动方向,和转动中心是由在一个链路上链接的坐标系决定的。链路基本构造如下(起点->终点):àHEXAPOD坐标系à水平测量坐标系à方位坐标系à操作坐标系。
坐标系总是右手系统。
HEXAPOD坐标系确定了所有其它坐标系的基本属性。HEXAPOD是基于hexapod几何数据的配置文件。在hexapod手册中尺寸图展示了HEXAPOD坐标系的各自位置。
使用控制器,可以定义自定义坐标系并且替代默认坐标系使用。
基于HEXAPOD,方位和水平测量坐标系适配生效操作坐标系的基本属性,并且在大多数应用中,它们自定义和激活是完全没有必要或者仅一次。
使用操作坐标系,hexapod运动平台的位置显示,运动方向,和转动中心适配了这个应用。使用àwork-and-tool坐标系也是可能的。在默认设置中,操作坐标系ZERO是生效的。
与用户定义的坐标系一起使用的最重要命令:
- KSD:通过为轴X, Y, Z, U, V和W输入偏移值,定义操作坐标系。
- KSF:在hexapod运动平台的当前位置(“(home)主坐标系”)定义操作坐标系。
- KLN:相互链接坐标系。
- KEN:激活坐标系。
- WPA SKS:保存坐标系当前有效设置。
- DPA SKS:重置参数和坐标系的设置为默认设置。
对于C-887.53, .531, .532和.533型号,在启动或重启后,默认激活了EtherCAT接口。由EtherCAT接口通过PI-specific(SDO),使用的坐标系(work-and-tool坐标系)被定义和激活。当EtherCAT接口被激活时,坐标系的设置不能被GCS命令更改。
重要
在PIMikroMove中,可以方便地定义,链接,激活和保存坐标系。为此,在Positioner Platform窗口中有Define Home Coordinate System(KSF)和Manage Coordinate Systems…按钮。Hexapod和有效坐标系以图形在Positioner 3D View卡上显示。
如果Positioner Platform窗口(通常停留)和Positioner 3-D View卡未在主窗上显示:
- 用C-887>Show Positioner platform settings菜单项显示Positioner Platform。
- 用C-887>Positioner 3-D View>Show菜单项显示Positioner 3-D View。
在文档 "Coordinate Systems for Hexapod Microrobots" (C887T0007) and in "Definition of Terms" 中找到有关坐标系和work-and-tool概念的进一步信息。
推荐PI Hexapod模拟工具测试用户定义的坐标系。你可以在"PI Hexapod Simulation Tool - Determining the Workspace and the Permissible Load of the Hexapod"文档中找到进一步信息。
例如,一个用户定义坐标系使用的示例,见"Example for Defining an Operating Coordinate System with the KSD Command"。
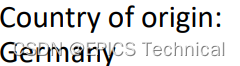
3.9.7 旋转
旋转绕旋转中心进行。在空间中按U->V->W顺序从各自旋转计算一个指定的旋转。不论U,V和W的值是由当前命令显示地指定或者源自先前地命令,这发生了。
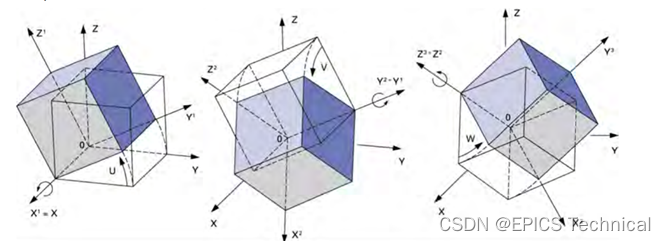
图1:当达到一个位置时hexapod平台基本旋转地目的(从左到右)
旋转中心描述了旋转轴U,V和W地交点。
旋转中心总是随着平台一起移动。
在任何时间通过定义和激活一个KSD类型操作坐标系或者工作和工具坐标系(KSW和KST类型),可以更改旋转中心。
当有效操作坐标系是ZERO坐标系或者一个KSF类型坐标系并且U=V=W=0应用于运动平台的旋转坐标时,旋转中心可以用SPI从工具坐标系原点在X和/或Y和/或Z方向移动。可以使用SPI命令被移动的旋转中心也被称为”轴心”。
有关C-887计算平移和转动的更多信息,参考文档” Hexapod Motion - Position and Orientation in Space, Center of Rotation”(C997T0021)。
3.9.8 用KSD命令定义一个操作坐标系的示例

图2:F-721.HA2高精度光纤对齐系统:应用实例
在高精度F-712.HA2光纤对齐系统中使用了客户特定的光纤载具,这个系统在发送和接收端上包含一个H-811 hexapod。在光纤对齐系统(发送者,接收者坐标系)发货时,为发送器和接收器的工厂设定坐标系是生效的。但,hexapod运动的旋转中心应该每次在光纤尖端。由于这个原因,客户特定的坐标系在hexapod控制器中为发送和接收端被定义。这些系统用于从标准位置向光纤尖端转移转动中心。在以下示例中,默认转动中心和光纤尖端之间的距离在X方向是85.37m和在Z方向71.88mm;也见以下图。称新坐标系fibertip1s(发送器)和fibertip1r(接收器),并且在启动或重启光纤对齐系统时,立即变得有效。
以下命令为hexapod控制器在发送端上被传送:
| 命令 | 函数 |
| KSD fibertip1s X 85.37 Z 71.88 | 定义新坐标系 |
| KLN fibertip1s sender | 链接新坐标系到sender坐标系作为子级 |
| KEN fibertip1s | 激活新坐标系 |
| WPA SKS | 在非易失内存中保存这些设置 |
以下图展示了使用发送端作为一个示例的坐标系和它们的定义。为了更好理解,不仅产生显示的fibertip1s坐标系,而且显示了其它坐标系统,fibertip1s通过链接从其它坐标系得到了它的特性:ZERO和sender(基于ZERO)。以单独地坐标系定义的各自适配步长并且这些坐标系之后链接的实现传输产生的坐标系的复杂计算到C-887。各自适配的步长也可以灵活地被组合。
图3:F-712.HA2:为发送端转移转动中心到光纤尖端
3.9.9 运动状态,稳定窗口,稳定时间
运动状态
C-887根据状态寄存器位显示运动状态,以及目标位置的达到。状态寄存器可用于hexapod structs和轴A和B。
用于显示运动状态的寄存器位:
- 用于每个hexapod struct和轴A和B的状态寄存器:
- 位13=1:Hexapod strut/轴A/B运动中
- 位13=0:Hexapod strut/轴A/B未在运动中
- 位15=1:目标位置已经到达。
- 位15=0:目标位置还未到达。
你可以用SRG?命令查询寄存器位。此外,你可以用C-887的数据记录器记录这些位,记录选项8(轴的状态寄存器)。
- 常见系统状态寄存器:
- 位8到15=1:目标位置还未到达(对应的hexapod struct(s)/轴A/B运动中)
- 位8到15=0:目标位置已经到达(相应的hexapod strut(s) / 轴A/B未在运动中)
你可以用STA?和#4命令查询系统状态寄存器的位。
以下命令可用于轴相关的查询:
- #5命令:请求轴的运动状态。只要至少一个hexapod struct在运动中,所有hexapod轴(X到W)的运动状态是”运动中”(根据以上说明的寄存器位的strut状态)。
- ONT?命令:查询有疑问的轴的在目标状态。
ONT?只检查hexapod的运动平台的轴(X到W)的动态轮廓的末尾是否已经到达,而非实际的运动状态。
Hexapod structs的运动状态指的是C-887从hexapod轴的目标位置位为struts计算的目标位置。C-887使用以下标准确定hexapod structs的运动状态以及轴A和B:
- 绕目标位置的稳定窗口
对Settling Window(encoder counts)参数ID 0x36的说明。这个参数只对应窗口宽度的一半。单位:编码器计数。
- 用于设置状态位位”位置已经到达”的延时时间:对Settle Time参数ID0x38的说明。单位:servo周期数目。
- 当当前位置在稳定窗口内并且在那停留了至少持续了这个延时时间时,认为目标位置已经到达。
3.11 通信接口
通过以下接口用ASCII命令可以控制C-887
- TCP/IP
- 串口RS-232连接
C-887.53, .531, .532和.533型号安装了EtherCAT接口。当通过EtherCAT接口控制hexapod系统时,它被用作一个根据CiA402驱动描述文件的多轴设备。EtherCAT主站控制hexapod运动平台的逻辑轴X,Y,Z,U,V和W。更多信息,见”通过EtherCAt接口控制”。
3.12 PC软件概要
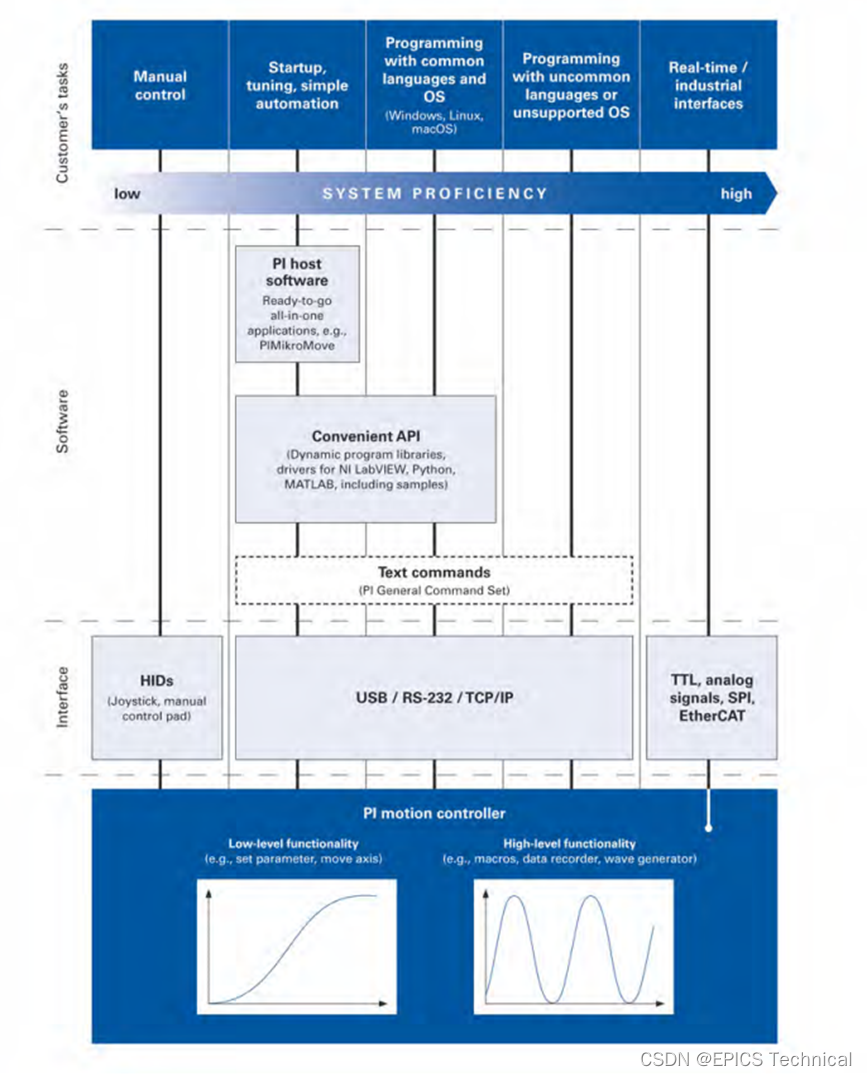
以下表格展示了对适合于C-887的PI软件的选择。指定的操作系统代表以下版本:
- Windows:版本8.1, 10, 11(32位,64位)
- Linux: Kernel 4.15.0; glibc:2.23; GTK2:2.24.30
| PC软件 | 支持的操作系统 | 简短描述 | 推荐使用 |
| MATLAB驱动程序 | Windows | MATLAB是一个用于数值计算开发环境和编程语言(必须单独从MathWorks订购)。 PI MATLAB驱动程序由MATLAB类组成,它可以包含在任何MATLAB脚本中。这个类支持PI通用命令集。 PI MATLAB驱动程序不需要任何其它MATLAB工具箱。 | 对于想要使用MATLAB来编程它们程序的用户。 |
| PIPython | Widnows, Linux | Python模块集合,用于便捷使用PI电子学和GCS数据。 这些模块与Python 3.6+一起使用。在其它操作系统上使用通过套接字也是可能的。 | 用于想要使用Python来为它们的应用程序编写脚本的用户。Python使用相当地扩展了GCS命令的功能范围。 |
| PITerminal | Windows, Linux | 可以用于几乎所有PI控制器地终端程序(参考PIMikroMove用户手册中Command Entry窗口地描述) | 用于想要直接发送GCS命令给控制器的用户 |
| PIStage3Editor | Windows | 打开和编辑.db格式数据库的程序 | 用于想要更密集处理定位器数据库内容的用户 |
| PIUpdateFinder | Windows | 检查安装在PC上的PI软件。如果在PI服务器上更新版本PC软件可用,它们被提供来下载。 | 用于想要更新PC软件的用户。 |
| PIHexapod SimulationTool | Windows | 仿真程序,在安装hexapod前,用其计算hexapod的工作空间和负载。也推荐用于测试用户定义的坐标系。 | 用于所有用户。 |
| PIVirtualMove | Windows 10或更高 | 仿真程序,它可用于仿真hexapods和P-616 NanoCube纳米定位器的工作空间和负载。支持坐标系处理。 | 用于所有用户。 |
| PIHexapod Emulator | Windows | 程序,用其仿真C-887和连接的hexapod以及轴A和B。可以直接启动PIHexapodEmulator(用localhost和端口5000通过TCP/IP连接)或者从PIMikroMove(在Start up controller对话框中选择C-887并且在PIHexapodEmulator标签卡上建立连接) | 用于想要在控制器和/或hexapod没有时,测试hexapod系统行为的用户 |
| PIVeriMove | Windows | 用于碰撞检查的PIVeriMove hexapod软件 在PC上必须通过证书激活。更多信息参考”附件”。 | 用于想要执行碰撞检查的用户 |
| PI Hexapod DataFiles | Windows | 在PC软件中图形显示hexapods的配置文件 | 需要PI Hexapod 3D库和PIVeriMove。 |
| PIFirmwave Manager | Windows | 用于更新C-887固件的程序。 | 用于想要更新固件的用户 |















 774
774











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









