






 本文介绍了扰动观察法(P&O)在光伏电池最大功率点追踪中的应用,通过电压扰动和功率比较来调整工作点,控制过程简单但存在兼顾快速性和稳定性的挑战。该算法依赖于电压和电流数据,追踪过程直到输出功率稳定为止。
本文介绍了扰动观察法(P&O)在光伏电池最大功率点追踪中的应用,通过电压扰动和功率比较来调整工作点,控制过程简单但存在兼顾快速性和稳定性的挑战。该算法依赖于电压和电流数据,追踪过程直到输出功率稳定为止。
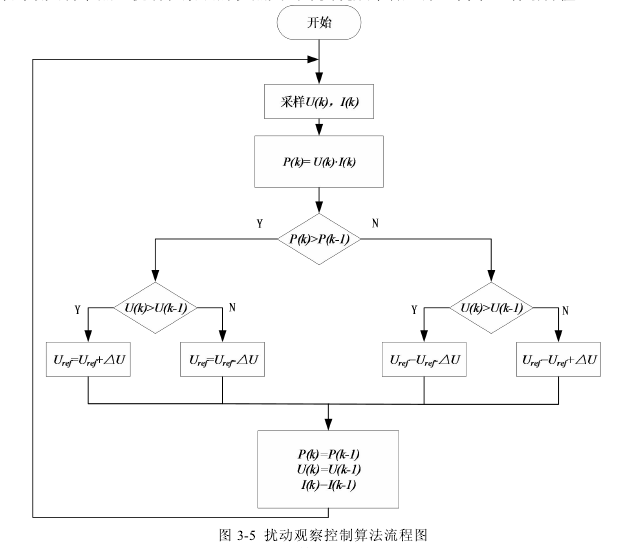
扰动观察法(Perturb and Observe algorithms, P&O),是一种试错性算法,工作原理为:在一个周期内,对光伏电池输出电压以预先设置的扰动步长和频率进行扰动,通过计算得到扰动后的功率值同上次扰动后的输出功率值做对比来判断下一次扰动方向。流程图和工作原理示意图如图。
具体控制为:
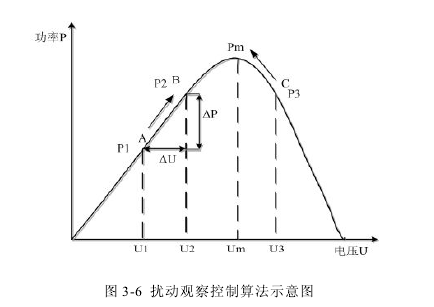
1)施加扰动U+若P>0,体现在图 3-6 中工作点由 A 点向 B 点,即此时工作点在 Um点左侧位置,此时继续按照原方向扰动即可追踪到最大功率点。
2)施加扰动U+若P<0,体现在图 3-6 中工作点由 C 点向右侧移动,即此时工作在 Um点右侧位置,此时需要按原方向的反方向继续扰动即可达到 Um点。
3)施加扰动U-若P>0,此时工作在右侧远离最大功率点处向 C 点移动,此时维持原扰动方向不变继续扰动即可达到 Um点。
4)施加扰动U-若P<0,图 3-6 中由工作点 B 到工作点 A,此时工作点在Um点左侧位置,需要按照原扰动方向的反方向扰动即可跟踪到最大值点。
按照此步骤,一直进行到再次施加扰动后输出功率基本保持不变,即前后两次采样并计算得到的输出功率之差绝对值小于一个接近于 0 的正数,这时表明已经跟踪到最大功率点。
在这个过程中,只需要采集光伏电池板的输出电压和电流,因此扰动观察法的控制过程比较简单。但是这种方法在追踪到最大功率点后还会有一段时间的扰动,也就是上面说的再次施加扰动,因此这种算法很难兼顾快速性和稳定性。基于扰动观察法的mppt算法

















 150
150

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









