






基于DSP28335逆变器程序,单相全桥逆变器程序,采用双极性调制
程序逻辑清晰,注释详细,详细到几乎每一句都有注释,对于小白异常友好,有些地方甚至基本原理都补充写明了,百分之99的程序注释不会有我写的这么详细
完整工程文件
采用闭环电流控制,SPWM调制
已上电验证可用,注释详细,逻辑清晰,排版整洁,适合新手学习
另有移相程序看主页,搜索移相程序,或私信我,我发给你链接
开发环境为CCS,适用的DSP型号为TI公司的TMS320F28335,针对其他型号的DSP程序也可以借鉴。
很多编程思路都可以借鉴到其他类型的电力电子变换器的闭环控制程序中
包含:程序说明、ADC采样模块、ePWM模块、PID控制、中断等
注释详细,适合新手学习
YID:665787732383870
爱心资源素材

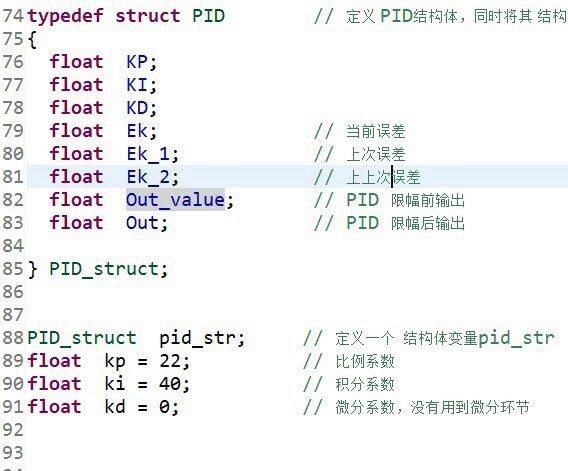
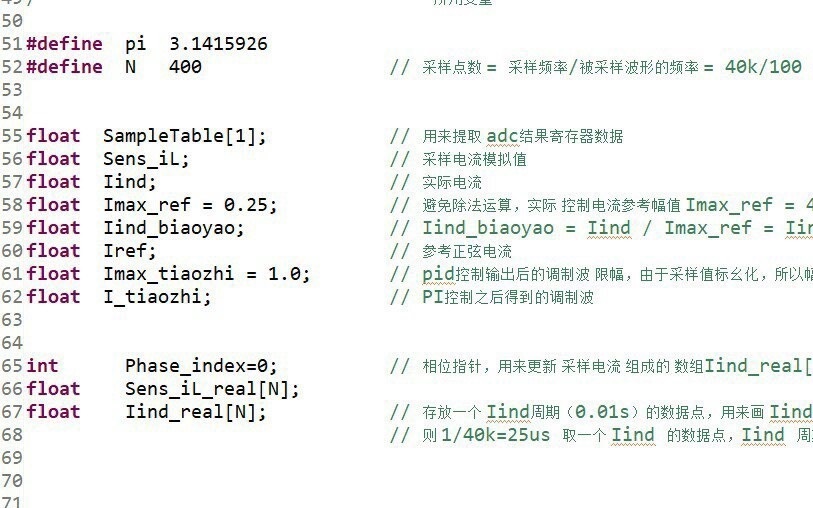
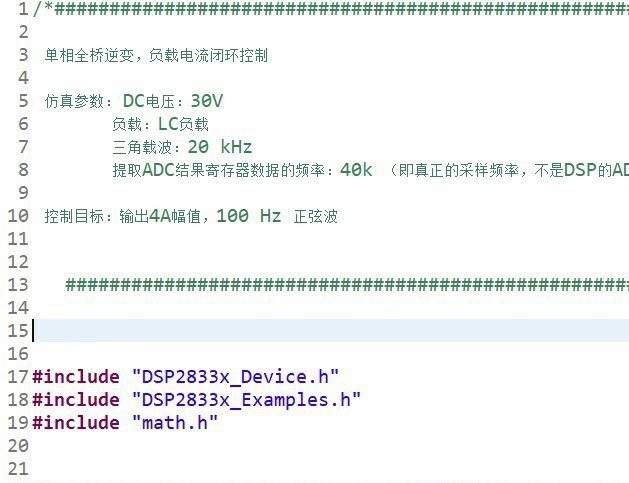
基于DSP28335逆变器程序,单相全桥逆变器程序的设计与实现是本文的主要内容。在这个程序中,我们采用了双极性调制技术,以实现闭环电流控制和SPWM调制。整个程序逻辑清晰,注释详细,几乎每一句代码都有注释,对于初学者来说非常友好。在一些地方,我们甚至补充了基本原理的解释,确保了程序的易理解性。
为了方便大家的学习和使用,我们提供了完整的工程文件。这些文件经过了上电验证,可以直接使用。除了注释详细、逻辑清晰、排版整洁外,还包含了闭环电流控制和SPWM调制等关键内容。对于初学者来说,这些文件非常适合学习和借鉴。
此外,我们还提供了移相程序的链接。在主页上搜索"移相程序"或私信我们,我们会将链接发给您。该移相程序同样基于DSP28335,可以作为补充学习材料,对于其他类型的电力电子变换器的闭环控制程序有很大的借鉴意义。
需要注意的是,这个程序的开发环境是CCS,适用的DSP型号为TI公司的TMS320F28335。对于其他型号的DSP程序,我们也可以借鉴其中的编程思路。该程序包含了程序说明、ADC采样模块、ePWM模块、PID控制和中断等关键内容,可以帮助初学者全面了解和掌握闭环电流控制的实现。
综上所述,基于DSP28335逆变器程序,单相全桥逆变器程序的设计与实现非常实用且具有很高的学习价值。无论是初学者还是有一定经验的开发者,都可以从中受益。我们提供的完整工程文件、详细注释以及移相程序链接,都将为大家的学习和研究提供很大的帮助。希望这篇文章能够对您有所启发,让您更好地理解和应用DSP28335逆变器程序。
相关的代码,程序地址如下:http://nodep.cn/787732383870.html
















 652
652

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









