#include <pcl/io/openni_grabber.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/io/io.h>
#include <pcl/common/time.h>
#include <pcl/features/integral_image_normal.h>
#include <pcl/features/normal_3d.h>
#include <pcl/ModelCoefficients.h>
#include <pcl/segmentation/planar_region.h>
#include <pcl/segmentation/organized_multi_plane_segmentation.h>
#include <pcl/segmentation/organized_connected_component_segmentation.h>
#include <pcl/filters/extract_indices.h>
typedef pcl::PointXYZRGBA PointT;
class OpenNIOrganizedMultiPlaneSegmentation
{
private:
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer;
pcl::PointCloud<PointT>::ConstPtr prev_cloud;
boost::mutex








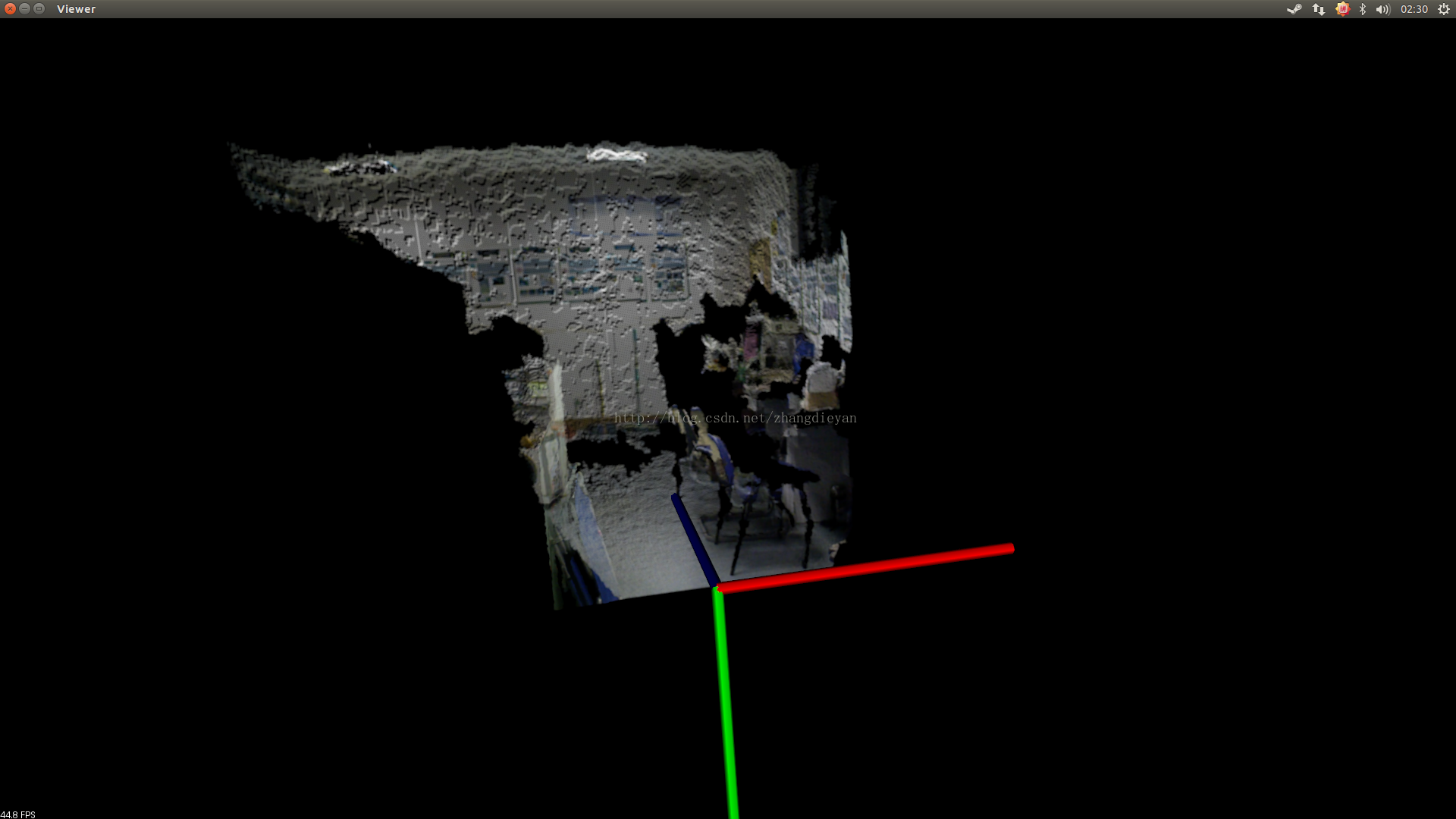
 该博客介绍了如何利用PCL库中的pcl::visualization::PCLVisualizer类来创建并更新一个3D点云查看器,展示从OpenNI设备获取的彩色点云数据。通过实例化OpenNIOrganizedMultiPlaneSegmentation类并运行其run()方法,实现实时显示点云并在视觉上调整点云的大小和透明度。
该博客介绍了如何利用PCL库中的pcl::visualization::PCLVisualizer类来创建并更新一个3D点云查看器,展示从OpenNI设备获取的彩色点云数据。通过实例化OpenNIOrganizedMultiPlaneSegmentation类并运行其run()方法,实现实时显示点云并在视觉上调整点云的大小和透明度。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









