










传感器与特征
传感器是平台的一部分,为拥有该平台提供了探测其他平台及其组成部分的能力。
特征是平台的一种属性,用于确定特定传感器是否能够探测到特征所拥有的平台。
以下是用于探测平台的一些特征属性列表:
- 声学
- 红外
- 光学
- 雷达
AFSIM 提供了信号传播、衰减、杂波和错误的选项,传感器支持发射器、接收器和天线的使用,以提供更高保真的建模和仿真;然而,这些是高级主题,在本指南中没有详细讨论。
以下列表包括一些预定义传感器模型:
- WSF_RADAR_SENSOR
- WSF_ESM_SENSOR
- WSF_SAR_SENSOR
- WSF_IRST_SENSOR
快速入门
在建模飞机时,雷达特征一般对于总体建模目的而言是最重要的。有了明确的雷达特征,飞机可以被雷达传感器探测到。
要定义雷达特征,请在全局范围内(不在平台、平台类型或其他命令块内)将以下特征命令块添加到场景文件中。此示例中的命名遵循本指南中早期的示例:
radar_signature CARGO_AIRCRAFT_RADAR_SIG
constant 10 m^2
end_radar_signature然后将这个特征属性提供给相关的平台类型定义:
platform_type CARGO_AIRCRAFT WSF_PLATFORM
...
radar_signature CARGO_AIRCRAFT_RADAR_SIG
end_platform_type现在,所有继承这个类型的平台都可以被雷达传感器探测到。接下来,可以通过将以下传感器命令块添加到现有平台或平台类型定义中来定义一个简化的雷达传感器。或者,传感器也可以独立定义并根据需要添加到指定的平台或平台类型中。
sensor AIR_RADAR WSF_GEOMETRIC_SENSOR
frame_time 5 sec
maximum_range 30 nm
reports_location
reports_bearing
on
end_sensor注意:为简单起见,此示例中使用 WSF_GEOMETRIC_SENSOR,因为它是基于几何的跨领域传感器模型。要实现更高保真的雷达,参见 WSF_RADAR_SENSOR。
更深入的观察
传感器的功能各异,但一般来说,它们识别平台的存在。直观的传感器示例包括人眼,可以建模为 WSF_OPTICAL_SENSOR;人耳可以建模为 WSF_ACOUSTIC_SENSOR。然而,如果检测目标的可探测性未被定义,这些传感器的价值会大大降低。特征在这里发挥作用。特征定义了特定平台或平台部分在相关领域内的“可探测性”。建筑物的 WSF_OPTICAL_SIGNATURE 定义了光是如何从建筑物反射出去的,以便被 WSF_OPTICAL_SENSOR 探测(或看到)。同样,飞机的 WSF_ACOUSTIC_SIGNATURE 定义了该飞机产生的噪声的频率和能量(响度),使之能够被 WSF_ACOUSTIC_SENSOR 探测到(或听到)。不同的传感器/特征对各自落入一个领域,描述了平台的可探测性以及传感器在相应领域内探测的能力。
注意:以下步骤假设“simple_flight”场景存在,如“移动器和路线”中所讨论。
添加雷达特征
如“快速入门”中所述,可以通过在 simple_flight.txt 脚本中添加以下 radar_signature 命令块来在 simple_flight 中定义一个雷达特征:
radar_signature CARGO_AIRCRAFT_RADAR_SIG
constant 10 m^2
end_radar_signature提示:这是一个简单的球形雷达特征,旨在展示功能。可以使用雷达特征命令块中的其他命令定义更复杂/准确的特征。
要将这个雷达特征与 CARGO_AIRCRAFT 关联,请在相关的平台类型定义中包含以下代码:
radar_signature CARGO_AIRCRAFT_RADAR_SIG 添加雷达
雷达是一种传感器,是 AFSIM 仿真中另一个关键的平台部分。传感器定义中可以包含附加的子命令,这些子命令会影响传感器的属性,包括视场、它对已探测实体报告的信息以及其范围。这将对于防止在 simple_flight 场景中两架飞机之间的碰撞非常重要。
添加雷达后,现在重要的是将两架飞机分配到不同的团队/侧,以确保在即将到来的模块中期望的行为。
1 将以下团队颜色添加到 cargo-1 和 cargo-2 的平台定义中(如果在地图显示中选择平台,可以在向导的“平台详情”中完成):
platform cargo-1 CARGO_AIRCRAFT
...
side blue
end_platform
platform cargo-2 CARGO_AIRCRAFT
...
side green
end_platform2 接下来,将以下传感器定义添加到 CARGO_AIRCRAFT 平台类型定义中(如果传感器独立定义,可以从平台浏览器 > 右键单击 > 管理平台部件中完成),并保存文件:
sensor AIR_RADAR WSF_GEOMETRIC_SENSOR
frame_time 3 sec
maximum_range 50 nm
reports_location
reports_bearing
reports_side
reports_velocity
azimuth_field_of_view -45.0 deg 45.0 deg
elevation_field_of_view -15.0 deg 15.0 deg
on
end_sensor通过这一添加,当两架飞机的距离接近传感器指定的最大范围时,双方将探测到彼此(并为之创建跟踪)。
在仿真开始时,Warlock 的地图显示应反映以下内容(传感器体积与路线的可视性可以通过 Warlock 的平台选项小部件显示):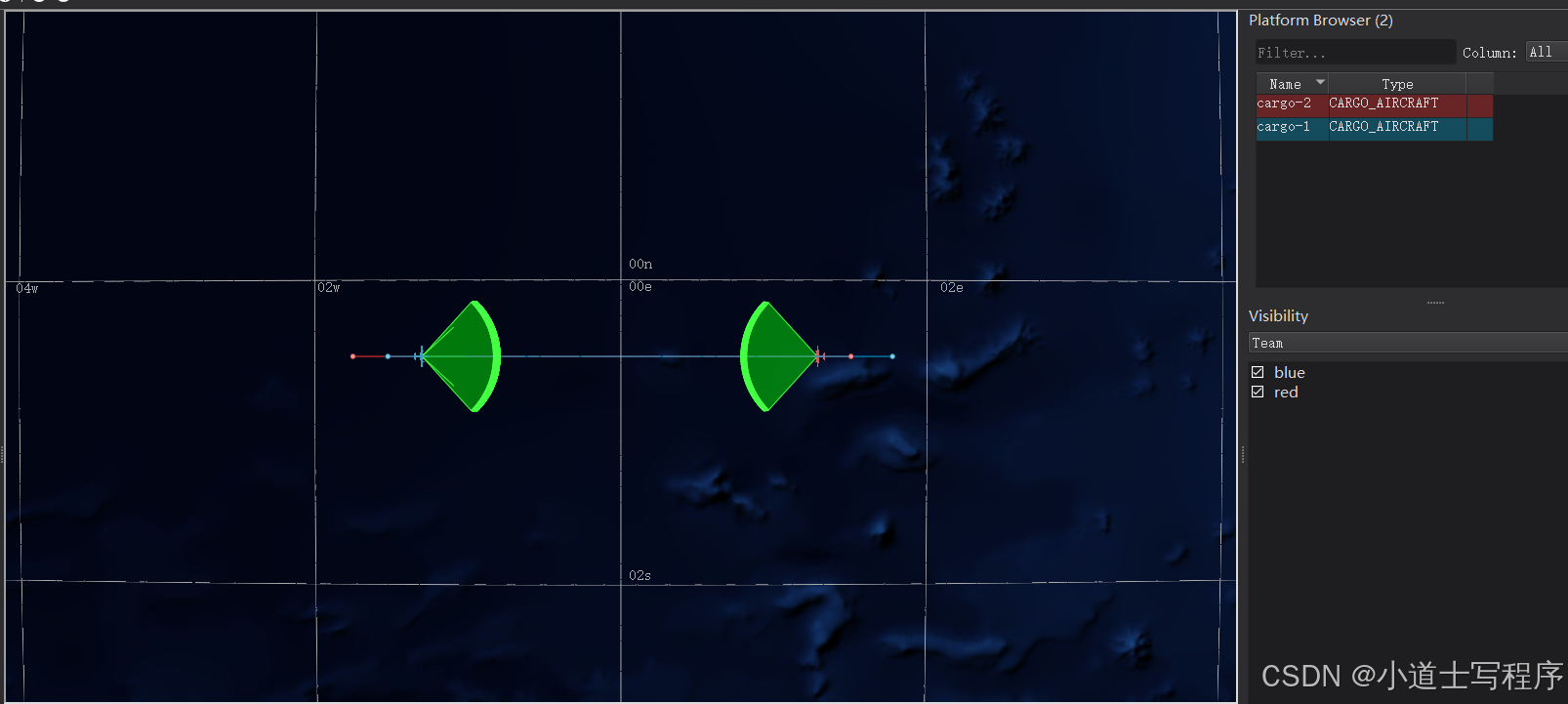
复习
完成该模块后,simple_flight 项目应包括一个单一的场景文件 simple_flight.txt,该文件反映以下内容:
simple_flight 演示
# simple_flight demo
simulation_name "Simple Flight"
execute at_time 0.1 sec absolute
writeln("\nSimulating simple_flight scenario...");
end_execute
end_time 30 min
radar_signature CARGO_AIRCRAFT_RADAR_SIG
constant 10 m^2
end_radar_signature
platform_type CARGO_AIRCRAFT WSF_PLATFORM
icon c130
spatial_domain air
category cargo
mover WSF_AIR_MOVER
update_interval 3 sec
end_mover
radar_signature CARGO_AIRCRAFT_RADAR_SIG
sensor AIR_RADAR WSF_GEOMETRIC_SENSOR
frame_time 5 sec
maximum_range 30 nm
reports_location
azimuth_field_of_view -45.0 deg 45.0 deg
elevation_field_of_view -15.0 deg 15.0 deg
ignore_same_side
on
end_sensor
end_platform_type
platform cargo-1 CARGO_AIRCRAFT
side blue
heading 90 deg
altitude 8000 m
route
position 00:30s 01:30w altitude 8000 m speed 500 km/h
position 00:30s 01:45e
end_route
end_platform
platform cargo-2 CARGO_AIRCRAFT
side green
heading -90 deg
altitude 8000 m
route
position 00:30s 01:30e altitude 8000 m speed 500 kmh
position 00:30s 01:45w
end_route
end_platform注意:随着 simple_flight 场景的复杂化,项目的重组变得更加重要。后续模块将包括将单个启动文件分离为多个资源文件。对于即将到来的模块,将不再直接向启动文件添加代码,而是将内容添加到新的文件或适当的现有资源文件中。
总结
传感器能够为其感知的特定领域签名生成轨迹。签名定义了给定平台在特定领域内的可探测性。轨迹是平台在决策时响应自动化的关键,当这些轨迹被传递给处理器进行解释时,处理器和轨迹将在后续模块中讨论。



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











