






作为一个一直没有祖传题目的专业课,今年就从这里开始吧(。・∀・)
关键索引词:电子科技大学 UESTC 成电 信软 图形与动画Ⅱ 图形与动画2 动画学 期中 考试 题目
考题范围
考题范围以及对应分值
| 题号 | 分值 | 对应章节和内容 |
|---|---|---|
| 1 | 10 | 计算题第六章-关键帧动画-前向差分法 |
| 2 | 10 | 简答题第六章-关键帧动画-易入易出 |
| 3 | 10 | 简答题第七章-光照-局部光照、全局光照、光影跟踪法 |
| 4 | 15 | 计算题 第七章-光照-光线、球相交问题(典型例题) |
| 5 | 15 | 类证明计算题 第八章-关节动画-二链杆 |
| 6 | 20 | 计算题 第十二章-先进物理模型-欧拉及典型欧拉计算 |
| 7 | 20 | 证明题 第八章-关节动画-三链杆情景写Jacobian矩阵等 |
因为18年也是吴佳老师带的动画学,根据往年转述,除以上出现题型以外,还会出现不定向选择,判断,所以最好要注意概念的分析和背诵。
考试题目
第1题
1.(10分)
已知某曲线路径长度s与路径方程参数u的关系表如下所示,利用前向差分法求出弧长为0.78时,曲线参数值u?
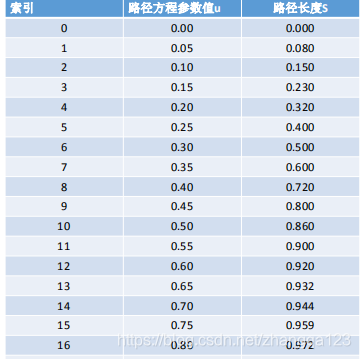
答案:【更具体的看ppt】
u=0.4375
第2题
2.(10分)
(1)
请解释什么是速度控制中的易入/易出(ease-in/ease-out)技术?
(2)
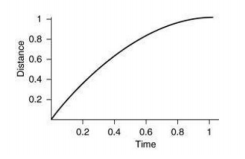
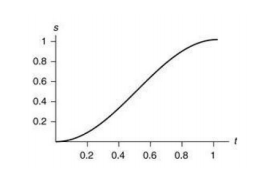
请判断下面两个图哪个能实现易入/易出速度控制并解释原因。
答:【更具体的看ppt】
(1)
易入/易出(ease-in/ease-out):对象从静止位置处加速运动并达到最大速度,最终减速运动至静止处。
(2)
后面的b图更能体现EIEO技术,b图的距离-时间函数在t上呈现出单调性,保持连续性,同时,因其运动方式为缓慢启动、加速、减速,由于斜率处于不断变化中,因而移动过程中呈现出加速或减速状态,且很少呈现匀速状态,满足易入易出特性。而a图则不包含易入/易出移动控制特性。
第3题
3.(10分)
(1)
请描述局部光照和全局光照模型的区别。
(2)
详细描述全局光照模型中的光线跟踪算法。
答:【更具体的看ppt】
(1)
局部光照:计算对象表面和射向它的光线之间的交点处光照强度,只考虑特定对象(光源)和直接射向它的光线。
全局光照:比起局部光照,它还要计算从其他对象反射出来的光线,产生更真实的光照效果,但需要付出大量额外计算的代价。
(2)
基本光线跟踪算法步骤:
1.为光线跟踪算法建立一个投影参考点在z轴、投影平面为xy平面的坐标系统。
2.从投影参考点出发,穿过每个像素中心进入场景。
3.计算与该光线相交的所有表面,找到最近的交点(可见面)。
4.计算该光线在此交点上反射和折射光强度。
5.构造二叉光线跟综树。
第4题
4.(15分)
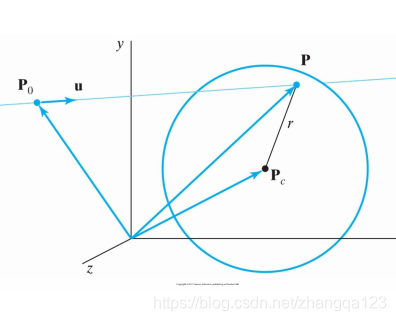
光线由初始位置P0(0.1.1)和单位向量u(0.0,-1)描述。球心坐标为Pc(1,1.1),球面半径r为3,判断光线是否与球面相交?若相交,求出交点坐标。
答:【更具体的看ppt】
相交
自己算【这里不知道考试的时候有没有写错TuT,要注意判断是几个交点。】
第5题
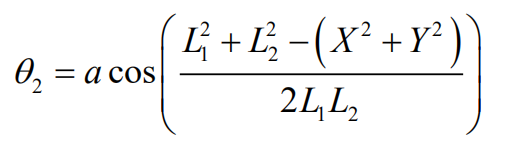
5.(15分)
已知:二维空间内二链杆可绕关节旋转链接体长度分别为L1和L2,问:如何运动到达末端影响器位置?
写出求解过程,同时推算出两链杆旋转角度1和2。

答:【更具体的看ppt】
求解过程自己自圆其说。
角1角2自己算,答案为:

第6题
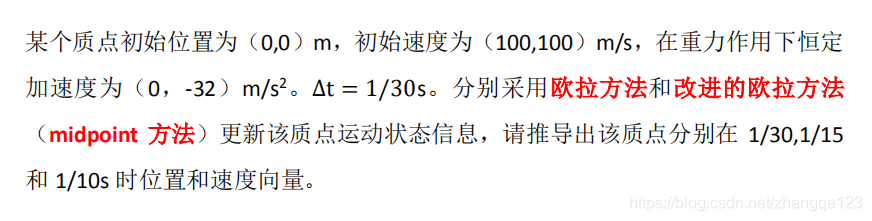
6.(20分)
利用欧拉公式和改进的欧拉公式推算物体在2倍▲t时间后位置和速度。已知物体初始位置为(0,0)m,初始速度为(10,10)m/s,且在重力作用下其加速度为(0,10) m/s2。时间间隔为▲t=10s。
答:【更具体的看ppt】
自己算,很简单。这里注意加速度老师给什么就是什么,不用考虑其他的,不要被重力迷惑了,比如曾经一道作业2:
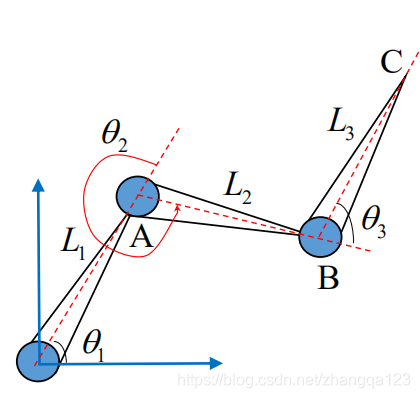
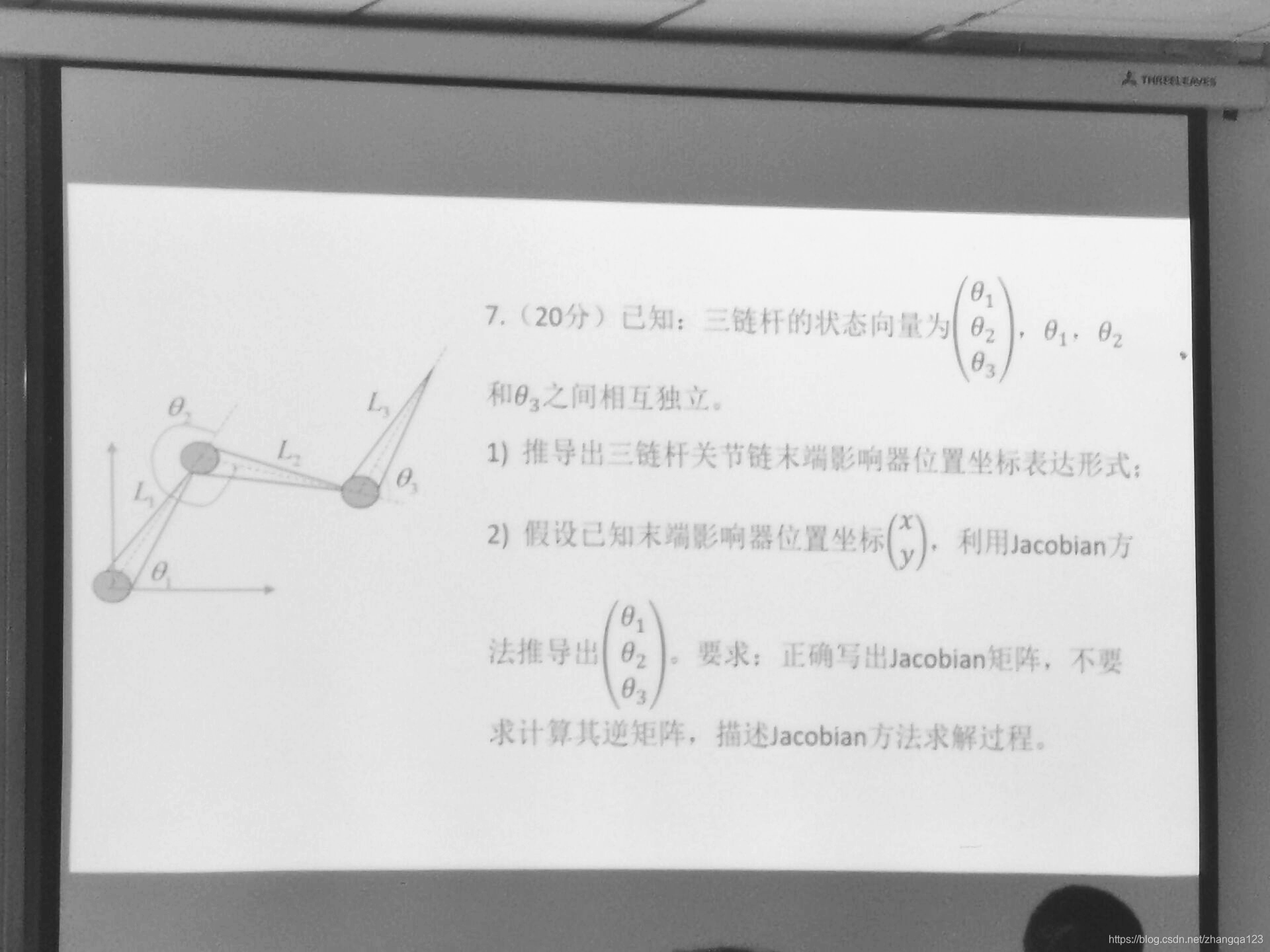
第7题
7.(20分)
为了不让题目内容失去一直表达性,我直接附原图:
答:【更具体的看ppt】
自己看相应章节。


















 2599
2599

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











