






 本文介绍了如何调试基于RV1126 AI摄像头的RTSP算法,同时配合车载雷达的CAN总线数据处理,使用STM32单片机解析并透传数据,通过PYQT5实现画面和网络接口的同步控制。
本文介绍了如何调试基于RV1126 AI摄像头的RTSP算法,同时配合车载雷达的CAN总线数据处理,使用STM32单片机解析并透传数据,通过PYQT5实现画面和网络接口的同步控制。
一、CAM调试
基于RV1126 AI摄像头通用组件,支持两路USART--ETH双向数据透传,支持RTSP算法识别。这个摄像头有现成的成品,淘宝上可淘到有需要链接的可以留言问我。将摄像头画面及一路透传配置好。因为摄像头是成品所以不再赘述。
二、雷达调试
雷达采用车载24G毫米波角雷达,测距最大支持80m以上,FOV120以上。支持CAN总线输出。
三、单片机调试
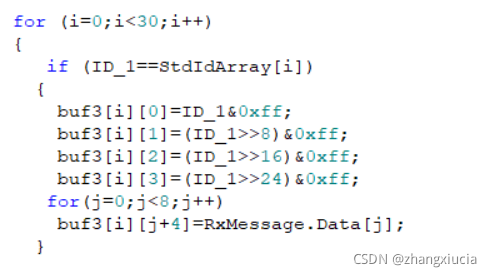
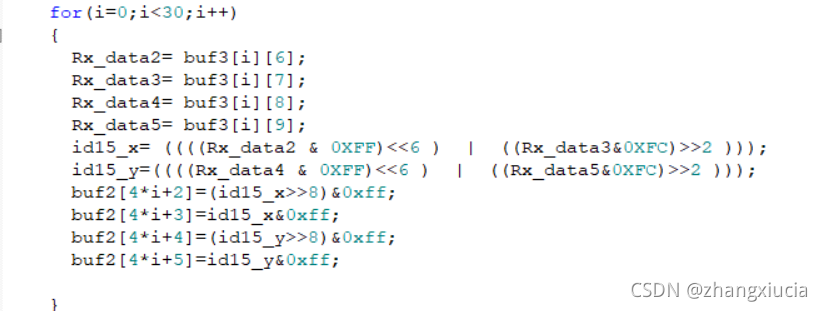
单片机选用成熟STM32103成熟开发板,支持CAN总线及USART接口,单片机主要用于接收雷达CAN总线信号并解析,提取需要数据帧用USART进行周期组包发送.需要注意的是单片机需要配置过滤器,只接收特定ID报文。这里有一个坑,如果不加过滤器,如果雷达数据非常多,有可能导致丢包。

四、PYQT5调试
这个像详细说一下,涉及的比较多,先简单说一下。详细的后续再更。
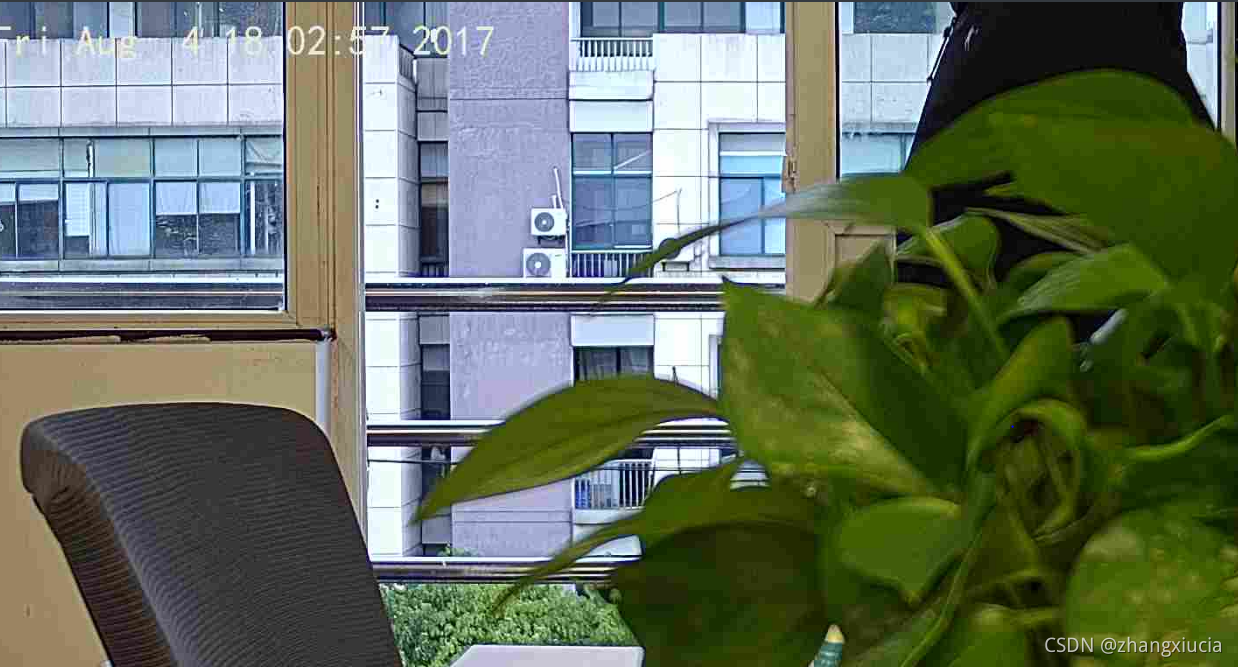
1、画面调试,python直接调用OPEN-CV库,不会的可以网上搜。要改下URL链接,这个是我用的摄像头的链接,别的品牌也差不多。需要注意的是需要将自己电脑的IP网段改成和摄像头一样的网段并关闭防火墙。

如果摄像头画面能出来,可以进行下一步操作。
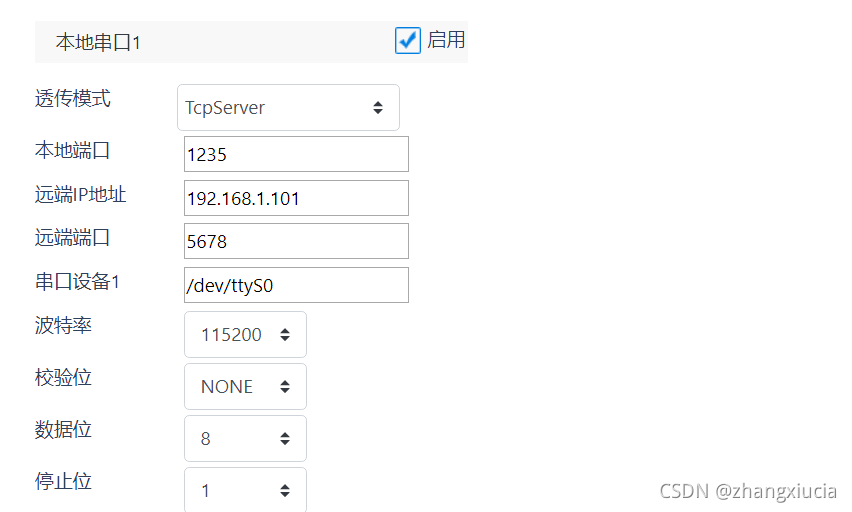
2、网口调试,单片机通过USART将数据发给摄像头,摄像头透传已经做好,这些数据通过网口可以获取到,见下图
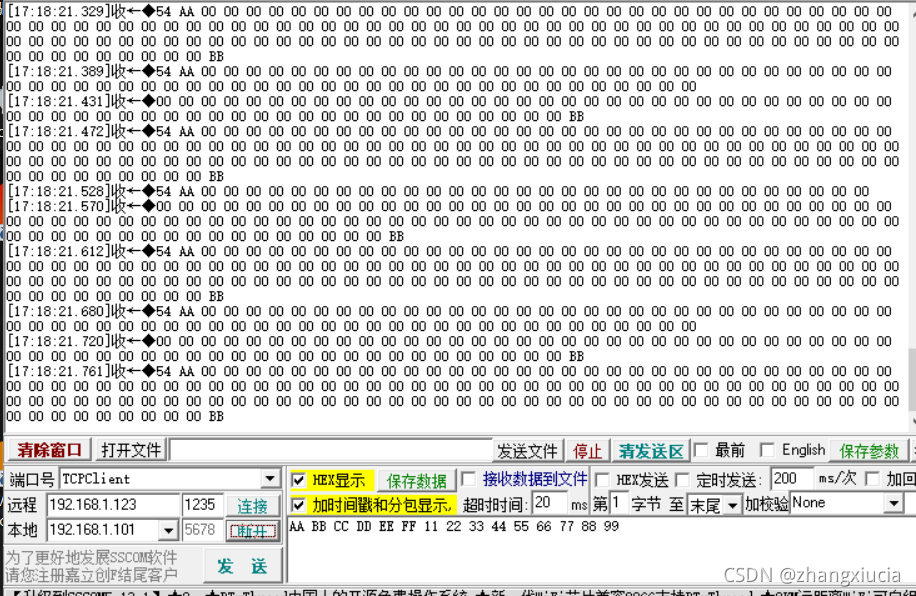
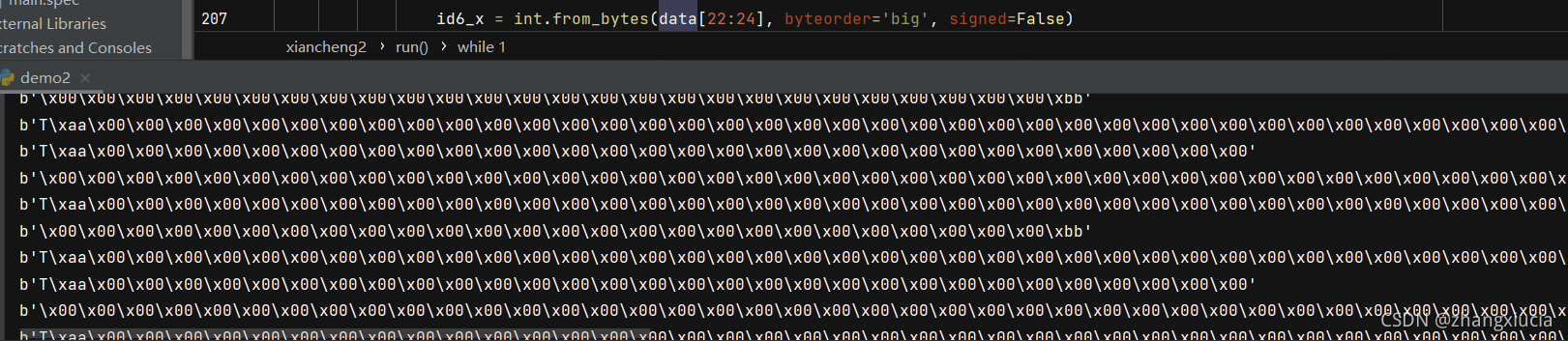
在Python中配置网口,具体的可以网上搜网络配置。IP和端口号如下所示
配置完成后再Python里打印接收到的信息,如果信息正常接收那么可以进行下一步。
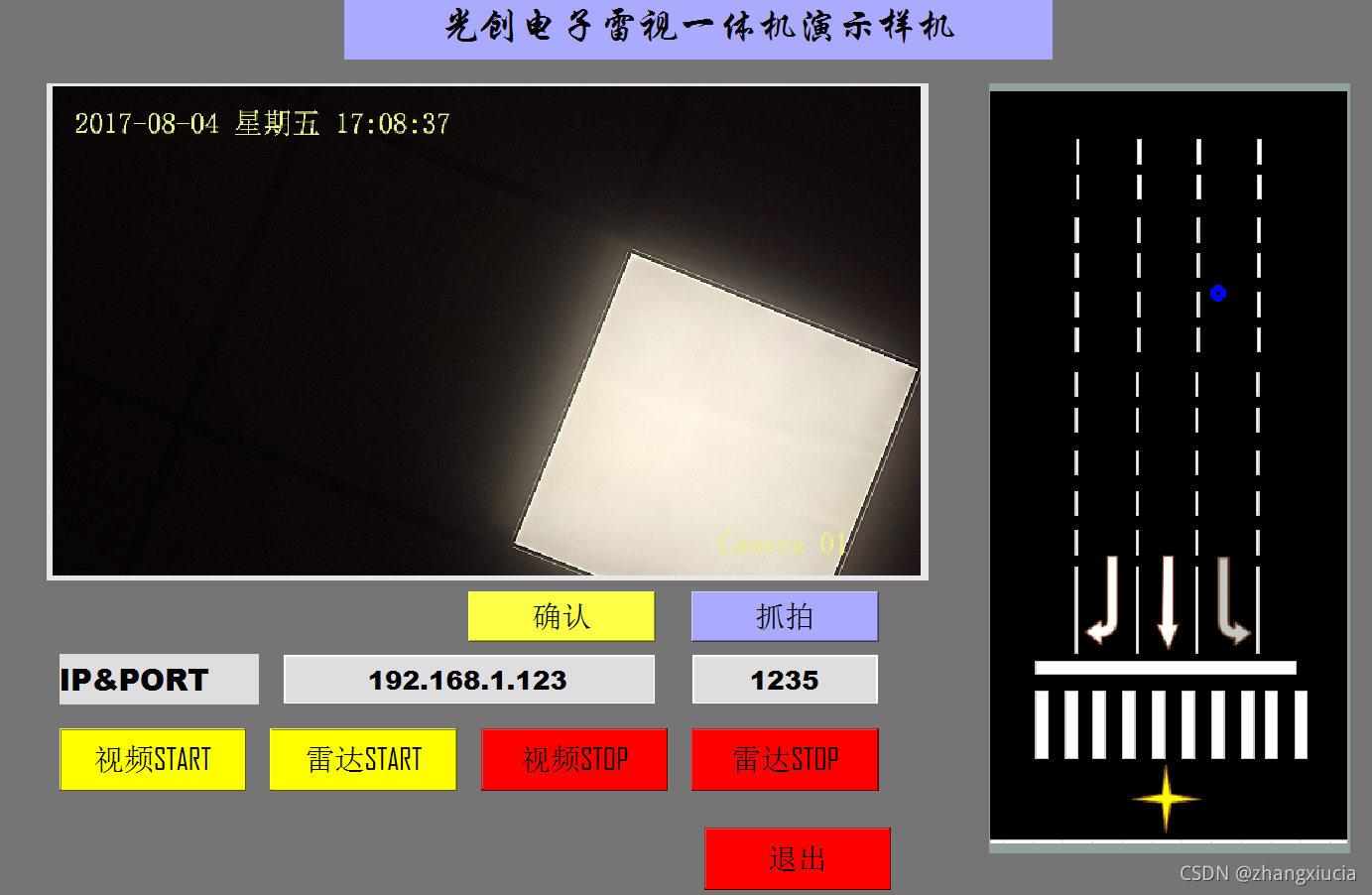
有这样一个问题,视频和网口是两个不同的任务那么怎么放在一起同步执行呢,这就需要PY多线程来做了。下次更新上位机具体开发过程。
效果如下图:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









