







信息与通信工程专业知识点预览(复试必看)
文章目录
1. 计算机视觉相关
1.1 图片格式
jpg是二进制24位,有损压缩,持续压缩画质会变差
gif是二进制8位的,支持动图
png,有24位和8位两种,支持透明格式,无损
服务器:
一个超强后端电脑
数据存储、传输和接收、数据处理
如下载东西就是从某个服务器中获取程序文件和数据
上传文件就是向这个服务器中上传了数据服务器保存
局域网:
一定范围内,一个机构没有经过第三方平台建立的网络(例:校园网)
1.2 像素点
像素点是显示器显示画面的最小发光单位,由红、绿、蓝三个像素单元组成,在彩色显像管中,电子枪通常有三支排列成三角形的单色电子枪组成,称为△(delta)配置,而显示器的荧光层也采用三位一体的荧光体,即含有红色、绿色、蓝色荧光体,它们的排列方式和电子枪的排列方式相同,这三种基色通过不同的亮度组合即可产生各种颜色。
屏幕中的像素点越多,画面的分辨率越高,图像就越细腻逼真。
像素也指分辨率,是指可以显示出的水平和垂直像素的数组,其值通常与若干显示方式相对应。分辨率为1366×768时,就是指在等离子屏幕的横向上 划分了1366 个像素点,竖向上划分了 768 个像素点,即一百零四万个像素点。分辨率越高,则可接收分辨率的范围越大,则等离子的信号接收范围越广。
1.3 单目摄像头和双目摄像头
单目摄像头:需要对目标进行识别,也就是说在测距前先识别障碍物是车、人还是别的什么。在此基础上再进行测距。
双目摄像头:更加像人类的双眼,主要通过两幅图像的视差计算来确定距离。也就是说,双目摄像头不需要知道障碍物是什么,只要通过计算就可以测距。
从这个角度来看,单目摄像头的缺点在于需要大量数据,并且不断更新和维护,而且针对一些特殊地区特殊情况,还需要不断优化。例如内蒙古大草原上经常有牛羊横穿公路,那你就需要更新数据,让机器知道这是牛,那是羊。数据收集、标签的难度确实有些大。
双目摄像头当然也不是十全十美,因为需要靠计算来进行测距。其最大的难点就在于计算量巨大。这带来的直接问题就是小型化难度很大。
1.4 单目测距
测距步骤
使用摄像机采集道路前方的图像;
在道路区域对物体进行检测,通过矩形框将物体形状框出来。(SSD目标物体检测,调用c++接口)
结合矩形框信息,找到该矩形框底边的两个像平面坐标,分别记为(u1,v1)和(u2,v2);(opencv自带函数,输出矩形框像素点坐标)
使用几何关系推导法,由像平面坐标点(u1, v1)、(u2, v2)推导出道路平面坐标(x1,y1)、(x2, y2);(投影到地面上,z轴为0)
通过欧氏距离公式计算出d。
1.5 镜头焦距
当对同一距离远的同一个被摄目标拍摄时,镜头焦距长的所成的象大,镜头焦距短的所成的象小。根据用途的不同,照相机镜头的焦距相差非常大,有短到几毫米,十几毫米的,也有长达几米的。一般而言,35mm相机的标准镜头焦长约是28-70mm,因此如果焦长高于70mm就代表支持望远效果,若是低于28mm就表示有广角拍摄能力。
镜头畸变:(镜头边缘)失真。
长焦距镜头:焦距长,视角小。
广角(鱼眼)镜头:焦距短,16mm及一下,视角大,接近180度。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-fRSf8KMz-1647955864634)(C:\Users\zhaohaobing\AppData\Roaming\Typora\typora-user-images\image-20220322211540748.png)]](https://img-blog.csdnimg.cn/2e452aa84cbe44228964210ae85bae28.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAemhhb2hhb2JpbmdTVUk=,size_17,color_FFFFFF,t_70,g_se,x_16)
2.深度学习相关
2.1 神经网络
现在唯一要做的就是训练我们的神经网络了。用各种“8”和非“8”的图片来训练,这样它就能学习怎么去区分了。
把像素输入到神经网络里,就可以做出图像的识别。
一个神经网络的训练算法就是让权重的值调整到最佳,以使得整个网络的预测效果最好。(小明去看电影的视频)
神经元模型的使用可以这样理解:
我们有一个数据,称之为样本。样本有四个属性,其中三个属性已知,一个属性未知。我们需要做的就是通过三个已知属性预测未知属性。
具体办法就是使用神经元的公式进行计算。三个已知属性的值是a1,a2,a3,未知属性的值是z。z可以通过公式计算出来。
这里,已知的属性称之为特征,未知的属性称之为目标。假设特征与目标之间确实是线性关系,并且我们已经得到表示这个关系的权值w1,w2,w3。那么,我们就可以通过神经元模型预测新样本的目标。
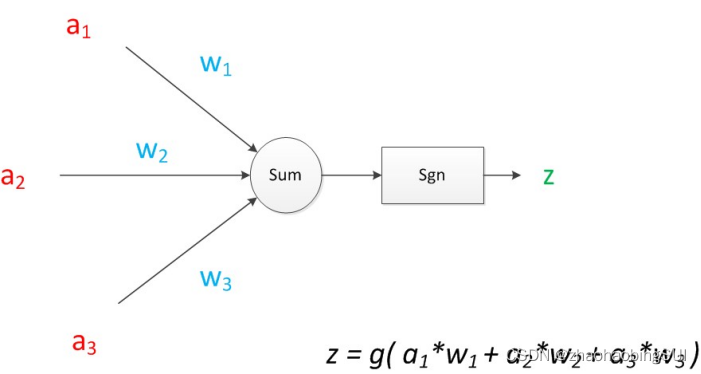
可见z是在输入和权值的线性加权和叠加了一个函数g的值。在MP模型里,函数g是sgn函数,也就是取符号函数。这个函数当输入大于0时,输出1,否则输出0。
2.2 卷积神经网络CNN
1、卷积:将滤波器的小矩阵与大矩阵卷积(从左上角开始),得到一个滤波后的小矩阵
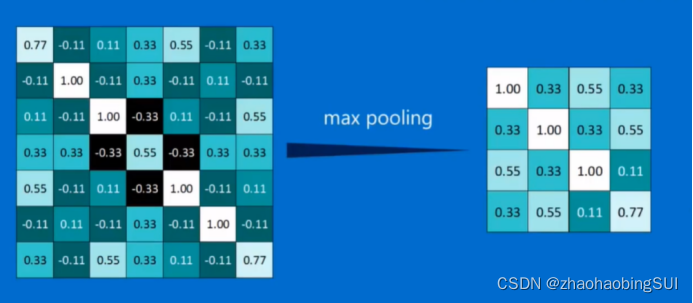
2、池化
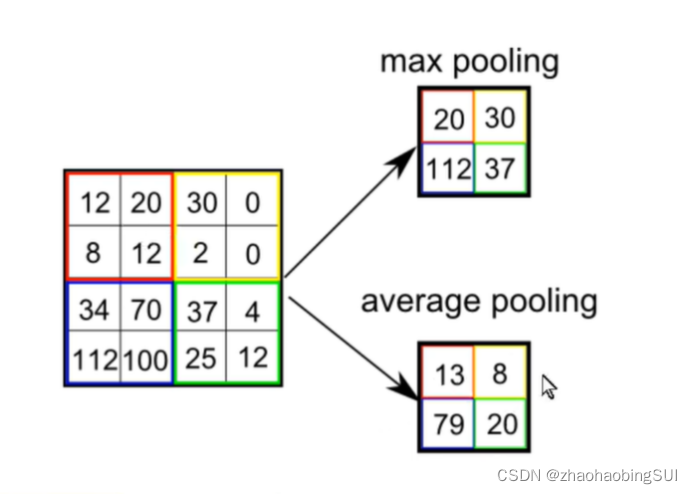
一般用max
3、修正单元激活函数,把小于零的都变成0
4、只能处理图像类的矩阵
2.3 机器学习
机器学习只有在你拥有数据的情况下,最好是大量的数据,才能有效。
在机器学习这个领域中,有更多的数据总比一个更好的算法更重要!
2.4 深度学习
多线程:
7z、rar、zip之间的区别:
7z->软件7zip,zip->winzip,rar->winrar。
只不过现在这几个软件基本互相支持。
压缩比:7p>zip>rar。
zip格式比较常见支技泛围广。windows操作系统不装任选第三方软件也可以打开zip格式。
rar 和7z必须用解压缩软件才行。许多智能机、电子书、mp3软件也支持zip
有码无码:
码指的是马赛克。
GUI(图形用户接口):
CIFAR10:
市场垂直细分:
拓扑图:
网络结构图。
3. 嵌入式相关
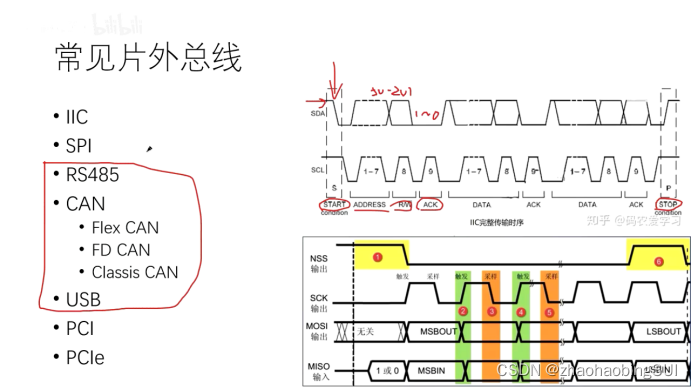
3.1 SDA数据线、SCL控制线
I2C:SCL高电平,同时SDA有高变低,开始数据传输
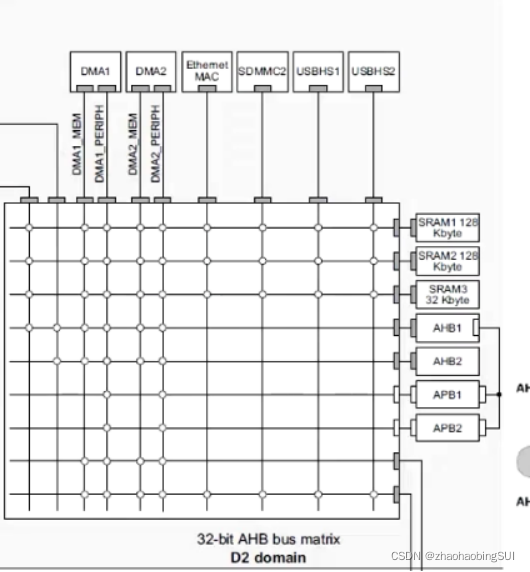
3.2 总线
计算机在各个部件之间传输信息的公共通信干线
区别串口,串口是只有两个设备之间可以传输,总线是可以挂很多设备,每个设备都可以发信号
3.3 片内总线
CPU内部的线
3.4 片外总线
I2C、SPI:单端信号
RS485、CAN、USB:差分信号(由两根线之间的差决定)
PCI:并行总线
4. 计算机网络相关
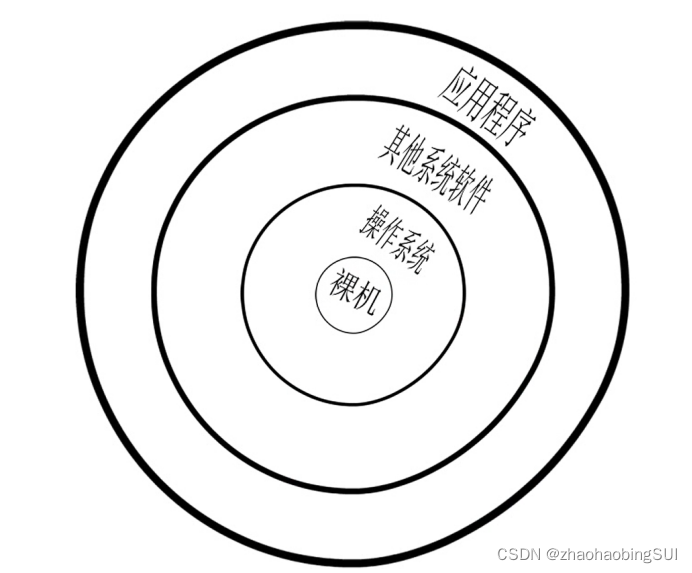
4.1 操作系统
操作系统管理着计算机的硬件资源(硬盘、磁盘、cpu等),为应用程序提供运行环境,应用程序使用硬件资源必须经过操作系统,操作系统统一安排其使用时间,使用完后还给操作系统,
4.2 API 应用程序编程接口
4.3 IDE 集成开发环境
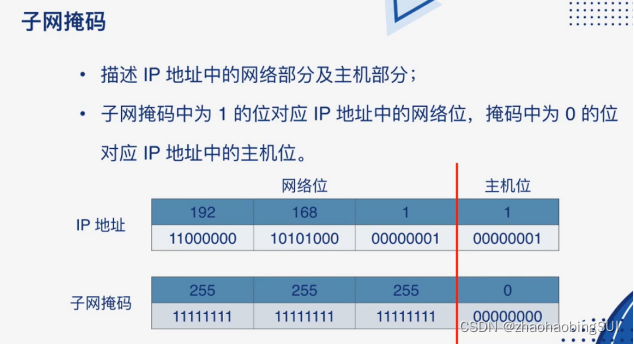
4.3 IP地址
Internet protocol 国际互联协议
Ip地址组成:网络位+主机位
32bit二进制码
自动获取IP:分配一个动态IP
电脑本身网卡会有一个物理地址
连接网络后会分配一个ip地址,ip地址会映射到电脑物理地址上
不同终端同一个局域网,网络位相同,主机位不同
Wifi 会分配不同的ip地址

传感器:
一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号(电压、电流、和频率)或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。
A/D转换器:
电压信号->数字信号。
信号调理电路:
是指把模拟信号变换为用于数据采集、控制过程、执行计算显示读出或其他目的的数字信号的电路。
网络协议:
区块链:
多线程:
对条线程同时执行。
中值:
遥感:
用电磁波->光谱
影响因子:
光学遥感卫星影像基础总结:
电磁波能量与频率成正比。
通常把电磁波谱划分为大大小小的段落,大的称为波段区,(可见区、红外区),中等的如近红外、远红外等;
• 以任何一种形式展示电磁辐射强度与波长之间的关系。叫做波谱
• 光谱:是复色光经过色散系统(如棱镜、光栅)分光后,被色散开的单色光按波长(或频率)大小而依次排列的图案,全称为光学频谱。
• 是传感器在获取目标地物图像的同时,也能获取反映地物特点的连续、光滑的光谱曲线。这种既能成像又能获取目标光谱曲线的“谱像合一”的技术,称为成像光谱技术
• 高光谱成像技术是基于非常多窄波段的影像数据技术,它将成像技术与光谱技术相结合,探测目标的二维几何空间及一维光谱信息,获取高光谱分辨率的连续、窄波段的图像数据
• 所谓高光谱图像就是在光谱维度上进行了细致的分割,不仅仅是传统所谓的黑、白或者R、G、B的区别,而是在光谱维度上也有N个通道,例如:我们可以把400nm-1000nm分为300个通道。
• 高光谱遥感是通过高光谱传感器探测物体反射的电磁波而获得地物目标的空间和频谱数据,成立于20世纪初期的测谱学就是它的基础。高光谱遥感的出现使得许多使用宽波段无法探查到的物体,更加容易被探测到,所以高光谱遥感的出现时成功的是革命性的。
• 光学遥感的发展过程可分为:全色(Panchromatic)→彩色(Color Photography)→多光谱(Multispectral)→高光谱(hyspectral)。
• 全色波段(Panchromatic band),因为是单波段,在图上显示是灰度图片。全色遥感影像一般空间分辨率高,但无法显示地物色彩。 实际操作中,我们经常将之与波段影象融合处理,得到既有全色影象的高分辨率,又有多波段影象的彩色信息的影象。
• 多光谱遥感:将地物辐射电磁破分割成若干个较窄的光谱段,以摄影或扫描的方式,在同一时间获得同一目标不同波段信息的遥感技术。
• 原理:不同地物有不同的光谱特性,同一地物则具有相同的光谱特性。不同地物在不同波段的辐射能量有差别,取得的不同波段图像上有差别。
• 优点:多光谱遥感不仅可以根据影像的形态和结构的差异判别地物,还可以根据光谱特性的差异判别地物,扩大了遥感的信息量。
• 航空摄影用的多光谱摄影与陆地卫星所用的多光谱扫描均能得到不同普段的遥感资料,分普段的图像或数据可以通过摄影彩色合成或计算机图像处理,获得比常规方法更为丰富的图像,也为地物影像计算机识别与分类提供了可能。
• 高光谱遥感起源于20世纪70年代初的多光谱遥感,它将成像技术与光谱技术结合在一起,在对目标的空间特征成像的同时,对每个空间像元经过色散形成几十乃至几百个窄波段以进行连续的光谱覆盖,这样形成的遥感数据可以用“图像立方体”来形象的描述。同传统遥感技术相比,其所获取的图像包含丰富的空间、辐射和光谱三重信息。
• 高光谱遥感技术已经成为当前遥感领域的前沿技术。
• 高光谱遥感具有不同于传统遥感的新特点:
• 1)波段多:可以为每个像元提供十几、数百甚至上千个波段;
• 2)光谱范围窄:波段范围一般小于10nm;
• 3)波段连续:有些传感器可以在350~2500nm的太阳光谱范围内提供几乎连续的地物光谱;
• 4)数据量大:随着波段数的增加,数据量成指数增加;
• 5)信息冗余增加:由于相邻波段高度相关,冗余信息也相对增加。
• 优点:
• 1)有利于利用光谱特征分析来研究地物;
• 2)有利于采用各种光谱匹配模型;
• 3)有利于地物的精细分类与识别;
• 高光谱和多光谱实质上的差别就是:高光谱的波段较多,普带较窄。(Hyperion有233~309个波段,MODIS有36个波段)
• 多光谱相对波段较少。(如ETM+,8个波段,分为红波段,绿波段,蓝波段,可见光,热红外(2个),近红外和全色波段)
• 高光谱遥感就是多比多光谱遥感的光谱分辨率更高,但光谱分辨率高的同时空间分辨率会降低
• 空间分辨率是指遥感影像上能够识别的两个相邻地物的最小距离
• 光谱分辨率是指传感器所能记录的电磁波谱中,某一特定的波长范围值,波长范围值越宽,光谱分辨率越低
• 光谱分辨率是指探测器在波长方向上的记录宽度,又称波段宽度(band width)。光谱分辨率被严格定义为仪器达到光谱响应最大值的50%时的波长宽度,一般来说识别某种波谱的范围窄,则相应光谱分辨率高
• ①多光谱成像技术(Multispectral Imaging),具有10~20个光谱通道。光谱分辨率为λ/Δλ≈10;
• ②高光谱成像技术(Hyperspectral Imaging),具有100~400个光谱通道的探测能力,一般光谱分辨率可达λ/Δλ≈100。
• ③超高光谱成像(Ultraspectral Imaging),光谱通道数在1000左右,光谱分辨率一般在λ/Δλ≧1000。
1 全色波段:黑白数据,同颗卫星的全色波段有较高的分辨率,没有彩色效果
2 多光谱:彩色数据,同颗卫星的多光谱波段相比较其全色波段而言分辨率不够高。多光谱波段通常是红、绿、蓝加近红外,不同卫星的多光谱波段一般不同。(SPOT没有蓝波段)
将分辨率较高的全色波段和彩色效果的多光谱波段融合在一起,就形成了分辨率较高的彩色数据。
脉冲:
突然的电流变化。冲宽是最大值的宽度。
天线:
发射天线:高频电流->电磁波
接受天线:无线电波->高频电波
口径->垂直于无线电波的入射方向,并且有效截获无线电波的有效面积。(效率参数)
卫星EIRP值增加可以减小口径。
合成孔径雷达:
相干成像,二维成像,高分辨率,倾斜
API:
多文件管理:
图像变换:
图像从空间域变换到另一个域,然后在变换域对图像进行处理和分析。
傅立叶变换、DCT变换,小波变换等。
图像复原:
常用的恢复有纠正几何失真、从已知图像信号和噪声的统计特性入手,用Wiener滤波等方法来改善信噪比等
图像重建:
数据->图片
图像分割:
每个区域代表被成像的一个物体(或部分,目标)。
数码相机:感光元件 光信号->电信号->模拟电信号->数字电信号
CT:X光会分层穿过人体
采样:连续多少为一个数值
量化:为这个数值是几
低频分量:图像的能量和灰度变化缓慢的部分对应频域
高频分量:(图像增强)图像的边缘和灰度变化大的部分对应频域
图像压缩:低频成分分配较多的比特数,对高频成分分配较少的比特数
特点:图像变换前后能量的分布发生了变化,但能量保持守恒。
图象增强:低通滤波,平滑噪声;高通滤波,锐化边缘。
图像的频率是表征图像中灰度变化剧烈程度的指标
实际上对图像进行二维傅立叶变换得到频谱图,就是图像梯度的分布图
经过傅里叶变换后的图像,四角对应于低频成分,中央部位对应于高频部分。
二维傅立叶变换分离成两个一维变换:即一个行变换一个列变换
图像的直流分量指的是平均亮度
5. 数字滤波器
5.1 带宽
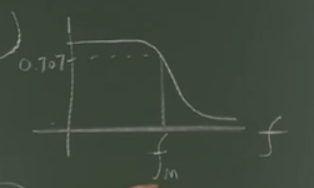
Fm是示波器能测量的最大测量频率,此时幅值是0.707倍,输入信号的频率大于这个频率会出现严重的失真。
1、低通:是容许低于截止频率的信号通过,但高于截止频率的信号不能通过的电子滤波装置。低通滤波器的通带频率范围是0~f0;
2、高通:是一种让某一频率以上的信号分量通过,而对该频率以下的信号分量大大抑制的电容、电感与电阻等器件的组合装置。高通滤波器的通带频率范围是f0~∞
2、带通:是指能通过某一频率范围内的频率分量、但将其他范围的频率分量衰减到极低水平的滤波器,与带阻滤波器的概念相对。带通滤波器的通带频率范围是f1~f2
4、带阻滤波器:是指能通过大多数频率分量、但将某些范围的频率分量衰减到极低水平的滤波器,与带通滤波器的概念相对。带阻滤波器的通带频率范围是0f1及f2∞.
1)通带截频fp=wp/(2p)为通带与过渡带边界点的频率,在该点信号增益下降到一个人为规定的下限;
2)阻带截频fr=wr/(2p)为阻带与过渡带边界点的频率,在该点信号衰耗下降到一人为规定的下限;
5.2 增益
滤波器在通带内的增益并非常数。
1)对低通滤波器通带增益Kp一般指w=0时的增益;高通指w→∞时的增益;带通则指中心频率处的增益;
2)对带阻滤波器,应给出阻带衰耗,衰耗定义为增益的倒数;
3)通带增益变化量△Kp指通带内各点增益的最大变化量,如果△Kp以dB为单位,则指增益dB值的变化量。
\2. 通带带宽(BWxdB):指需要通过的频谱宽度,BWxdB=(f2-f1)。f1、f2为以中心频率f0处插入损耗为基准,下降X(dB)处对应的左、右边频点。通常用X=3、1、0.5 即BW3dB、BW1dB、BW0.5dB 表征滤波器通带带宽参数。分数带宽(fractional bandwidth)=BW3dB/f0×100[%],也常用来表征滤波器通带带宽。
















 2622
2622











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











