






【致谢】http://blog.sina.com.cn/s/blog_631a4cc401013pkn.html
【致谢】http://blog.csdn.net/zouxy09/article/details/7929531
全局特征")
纹理分类是一个很老的topic,但是一些纹理分类的方法为以后的图片分类奠定了基础。
1. LBP
以R为半径的P点邻域,gc为中心,gp为邻域点 ;区分邻域比中心亮度大还是小
全局特征")
全局特征")
全局特征")
:改变P,R 形成多尺度LBP
全局特征")
P=8,7*8+2=58个编码值,其余的U>2的归为一个bin
全局特征")
3. 旋转不变的LBP : 36个
为了形成旋转不变的编码模式,我们让有同一编码模式经旋转后产生的编码结果编码为同一值,即这些旋转结果中的最小值
![]()
全局特征")
4. 旋转不变的uniform LBP
即在uniform LBP中,开始7行的每一行为旋转不变,被编为一个编码值,对应上图中第一行的1-7个模式。再加上 全1和全0
全局特征")
一. 增加幅值信息,增加对噪声鲁棒性
1. LTP
对二值化设定阈值
三值编码:使相对中心值变化在t范围内的邻域量化为0;比ic大于t的量化为1;比ic小于t的量化为-1
全局特征")
全局特征")
最后把三值编码转化为正的和负的两部分,2个8bit编码作为特征向量;
全局特征")
2. CLBP
像素值差分为符号和幅值两项考虑 ,对符号的编码CLBP_S和LBP一样 ( 8位)
![]()
全局特征")
全局特征")
![]()
全局特征")
1.![]()
在训练集上得到局部方差的量化阈值,对局部方差进行量化,与![]() 计算联合直方图
计算联合直方图
缺点:由于训练和测试图片成像条件不同,训练的量化阈值可能在测试图片上不适合
2.
将每个点的方差作为编码值的权重,进行直方图累加(类比sitf中按方向累计梯度幅值)。原理:方差大,对应区域变化大,为高频区域,对区分性贡献大,所以对应该处编码权重大
全局特征")
三. 增加局部梯度信息(类比SIFT)
1. CS-LBP
对中心对称点的亮度差编码,即编码四方向的梯度符号,缩短编码长度
全局特征")
全局特征")
2. TP-LBP
全局特征")
全局特征")
全局特征")
3. POEM
(1) 计算梯度:方向和大小,对方向离散化m个
(2) 对每点,按离散方向,累积半径为r邻域内的梯度幅值(高斯加权),形成m个累积梯度幅值图像
(3) 对每个图像,计算半径R,邻域P的LBP,形成m个LBP
全局特征")
4. LDP
(1) 计算8方向边缘响应
全局特征")
(2) 取第K主方向值Mk(即第k大的边缘响应幅值)作为阈值,进行二值化形成编码。有C_8_k种编码值
全局特征")
四. 对U-LBP的改进
1. H-LBP
层叠的多多尺度LBP
ULBP将U>2的编码都对归入到一个bin中,丢失了其中的区分信息。
半径越大非uniform编码出现频率越高,而大半径中为非uniform的编码在小半径时可能为uniform形式,此时把其编码换为小半径中uniform形式,直至半径缩小为指定大小
全局特征")
全局特征")
************************************************************************************************************
目标检测的图像特征提取之(二)LBP特征
LBP(Local Binary Pattern,局部二值模式)是一种用来描述图像局部纹理特征的算子;它具有旋转不变性和灰度不变性等显著的优点。它是首先由T. Ojala, M.Pietikäinen, 和 D. Harwood 在1994年提出,用于纹理特征提取。而且,提取的特征是图像的局部的纹理特征;
1、LBP特征的描述
原始的LBP算子定义为在3*3的窗口内,以窗口中心像素为阈值,将相邻的8个像素的灰度值与其进行比较,若周围像素值大于中心像素值,则该像素点的位置被标记为1,否则为0。这样,3*3邻域内的8个点经比较可产生8位二进制数(通常转换为十进制数即LBP码,共256种),即得到该窗口中心像素点的LBP值,并用这个值来反映该区域的纹理信息。如下图所示:

LBP的改进版本:
原始的LBP提出后,研究人员不断对其提出了各种改进和优化。
(1)圆形LBP算子:
基本的 LBP算子的最大缺陷在于它只覆盖了一个固定半径范围内的小区域,这显然不能满足不同尺寸和频率纹理的需要。为了适应不同尺度的纹理特征,并达到灰度和旋转不变性的要求,Ojala等对 LBP 算子进行了改进,将 3×3邻域扩展到任意邻域,并用圆形邻域代替了正方形邻域,改进后的 LBP 算子允许在半径为 R 的圆形邻域内有任意多个像素点。从而得到了诸如半径为R的圆形区域内含有P个采样点的LBP算子;

(2)LBP旋转不变模式
从 LBP 的定义可以看出,LBP 算子是灰度不变的,但却不是旋转不变的。图像的旋转就会得到不同的 LBP值。
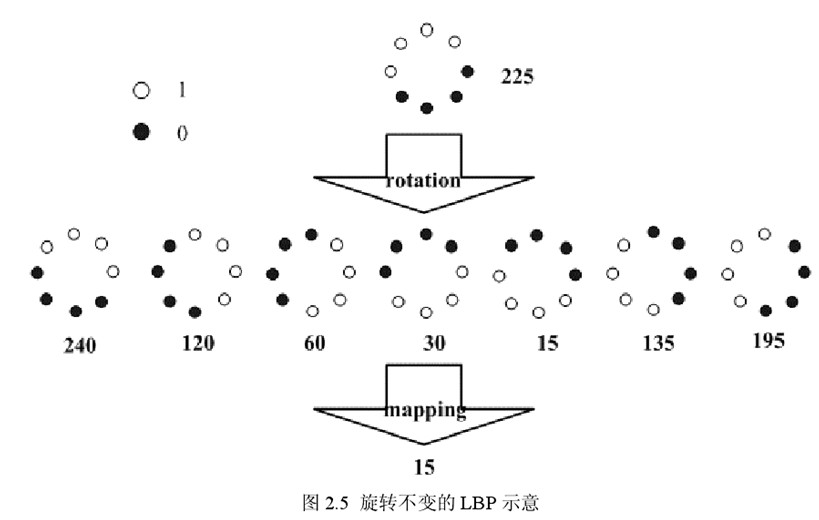
Maenpaa等人又将 LBP算子进行了扩展,提出了具有旋转不变性的 LBP 算子,即不断旋转圆形邻域得到一系列初始定义的 LBP值,取其最小值作为该邻域的 LBP 值。
图 2.5 给出了求取旋转不变的 LBP 的过程示意图,图中算子下方的数字表示该算子对应的 LBP值,图中所示的 8 种 LBP模式,经过旋转不变的处理,最终得到的具有旋转不变性的 LBP值为 15。也就是说,图中的 8种 LBP 模式对应的旋转不变的 LBP模式都是 00001111。
(3)LBP等价模式
一个LBP算子可以产生不同的二进制模式,对于半径为R的圆形区域内含有P个采样点的LBP算子将会产生P2种模式。很显然,随着邻域集内采样点数的增加,二进制模式的种类是急剧增加的。例如:5×5邻域内20个采样点,有220=1,048,576种二进制模式。如此多的二值模式无论对于纹理的提取还是对于纹理的识别、分类及信息的存取都是不利的。同时,过多的模式种类对于纹理的表达是不利的。例如,将LBP算子用于纹理分类或人脸识别时,常采用LBP模式的统计直方图来表达图像的信息,而较多的模式种类将使得数据量过大,且直方图过于稀疏。因此,需要对原始的LBP模式进行降维,使得数据量减少的情况下能最好的代表图像的信息。
为了解决二进制模式过多的问题,提高统计性,Ojala提出了采用一种“等价模式”(Uniform Pattern)来对LBP算子的模式种类进行降维。Ojala等认为,在实际图像中,绝大多数LBP模式最多只包含两次从1到0或从0到1的跳变。因此,Ojala将“等价模式”定义为:当某个LBP所对应的循环二进制数从0到1或从1到0最多有两次跳变时,该LBP所对应的二进制就称为一个等价模式类。如00000000(0次跳变),00000111(只含一次从0到1的跳变),10001111(先由1跳到0,再由0跳到1,共两次跳变)都是等价模式类。除等价模式类以外的模式都归为另一类,称为混合模式类,例如10010111(共四次跳变)(这是我的个人理解,不知道对不对)。
通过这样的改进,二进制模式的种类大大减少,而不会丢失任何信息。模式数量由原来的2P种减少为 P ( P-1)+2种,其中P表示邻域集内的采样点数。对于3×3邻域内8个采样点来说,二进制模式由原始的256种减少为58种,这使得特征向量的维数更少,并且可以减少高频噪声带来的影响。
2、LBP特征用于检测的原理
显而易见的是,上述提取的LBP算子在每个像素点都可以得到一个LBP“编码”,那么,对一幅图像(记录的是每个像素点的灰度值)提取其原始的LBP算子之后,得到的原始LBP特征依然是“一幅图片”(记录的是每个像素点的LBP值)。

LBP的应用中,如纹理分类、人脸分析等,一般都不将LBP图谱作为特征向量用于分类识别,而是采用LBP特征谱的统计直方图作为特征向量用于分类识别。
因为,从上面的分析我们可以看出,这个“特征”跟位置信息是紧密相关的。直接对两幅图片提取这种“特征”,并进行判别分析的话,会因为“位置没有对准”而产生很大的误差。后来,研究人员发现,可以将一幅图片划分为若干的子区域,对每个子区域内的每个像素点都提取LBP特征,然后,在每个子区域内建立LBP特征的统计直方图。如此一来,每个子区域,就可以用一个统计直方图来进行描述;整个图片就由若干个统计直方图组成;
例如:一幅100*100像素大小的图片,划分为10*10=100个子区域(可以通过多种方式来划分区域),每个子区域的大小为10*10像素;在每个子区域内的每个像素点,提取其LBP特征,然后,建立统计直方图;这样,这幅图片就有10*10个子区域,也就有了10*10个统计直方图,利用这10*10个统计直方图,就可以描述这幅图片了。之后,我们利用各种相似性度量函数,就可以判断两幅图像之间的相似性了;
3、对LBP特征向量进行提取的步骤
(1)首先将检测窗口划分为16×16的小区域(cell);
(2)对于每个cell中的一个像素,将相邻的8个像素的灰度值与其进行比较,若周围像素值大于中心像素值,则该像素点的位置被标记为1,否则为0。这样,3*3邻域内的8个点经比较可产生8位二进制数,即得到该窗口中心像素点的LBP值;
(3)然后计算每个cell的直方图,即每个数字(假定是十进制数LBP值)出现的频率;然后对该直方图进行归一化处理。
(4)最后将得到的每个cell的统计直方图进行连接成为一个特征向量,也就是整幅图的LBP纹理特征向量;
然后便可利用SVM或者其他机器学习算法进行分类了。
Reference:
黄非非,基于 LBP 的人脸识别研究,重庆大学硕士学位论文,2009.5















 2212
2212

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









