







工作原理:增量式旋转编码器通过内部两个光敏接受管转化其角度码盘的时序和相位关系,得到其角度码盘角度位移量增加(正方向)或减少(负方向)。
内部工作原理(判断正转还是反转):
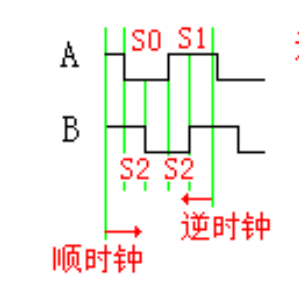
AB 相编码器内部有两对光电耦合器,输出相位差为 90°的两组脉冲序列。正转和反转时两路脉冲的超前、滞后关系刚好相反。
在 B 相脉冲的上升沿,正转和反转时 A相脉冲的电平高低刚好相反,因此使用 AB 相编码器, PLC 可以很容易地识别出转轴旋转的方向。看图:
| 顺时针AB | 逆时针AB |
| 11 |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









