







(亲测成功)今天打包apk的时候,突然出现一个错误,如图:

然后再lint warnings下提示如下错误:

解决方法:
首先,选中自己的项目,然后再点击project工具,在弹出来的下拉列表中选择Properties(一般是列表中的最后一个选项)

然后,在弹出的选项卡中找到Adnroid Lint Preferences并点击,在右上角找到Configure Workspace Settings...如图:

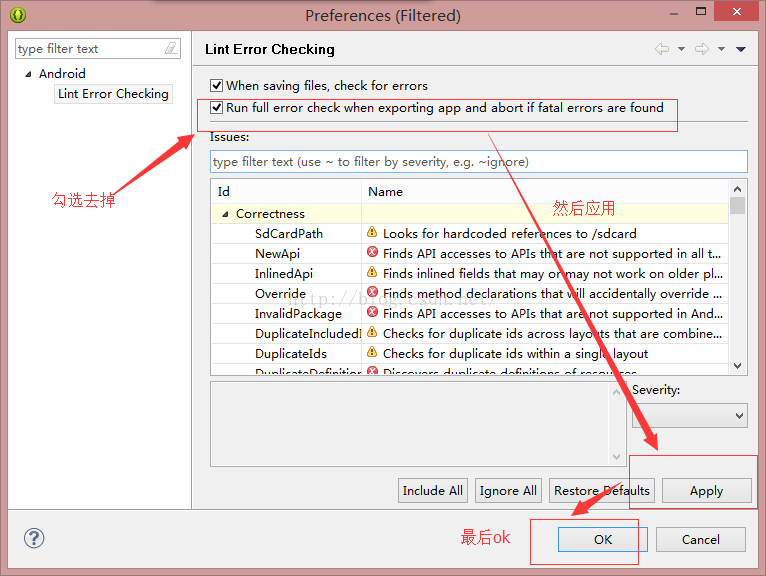
最后在弹出的新的对话框中将"Run full error check when exporting app and abort if fatal errors are found "前的勾去掉,点击Apply再点击OK
关闭所有选项卡,然后clean项目,打包就行了!

















 3881
3881

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









