






- /* 程序头部注释开始
- * 程序的版权和版本声明部分
- * Copyright (c) 2017, 烟台大学计算机学院学生
- * All rights reserved.
- * 文件名称: danlianbao.cpp
- * 作 者: 胡俊超
- * 完成日期: 2017 年 11 月 9 日
- * 版 本 号: v1.0
- * 对任务及求解方法的描述部分
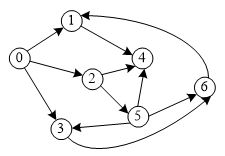
- * 问题描述:假设图G采用邻接表存储,分别设计实现以下要求的算法: (1)输出出图G中每个顶点的出度; (2)求出图G中出度最大的一个顶点,输出该顶点编号; (3)计算图G中出度为0的顶点数; (4)判断图G中是否存在边<i,j>。 利用下图作为测试用图,输出结果。
-
-
- 通过算法库
- main.cpp
-
#include <stdio.h> #include <malloc.h> #include "graph.h" //返回图G中编号为v的顶点的出度 int OutDegree(ALGraph *G,int v) { ArcNode *p; int n=0; p=G->adjlist[v].firstarc; while (p!=NULL) { n++; p=p->nextarc; } return n; } //输出图G中每个顶点的出度 void OutDs(ALGraph *G) { int i; for (i=0; i<G->n; i++) printf(" 顶点%d:%d\n",i,OutDegree(G,i)); } //输出图G中出度最大的一个顶点 void OutMaxDs(ALGraph *G) { int maxv=0,maxds=0,i,x; for (i=0; i<G->n; i++) { x=OutDegree(G,i); if (x>maxds) { maxds=x; maxv=i; } } printf("顶点%d,出度=%d\n",maxv,maxds); } //输出图G中出度为0的顶点数 void ZeroDs(ALGraph *G) { int i,x; for (i=0; i<G->n; i++) { x=OutDegree(G,i); if (x==0) printf("%2d",i); } printf("\n"); } //返回图G中是否存在边<i,j> bool Arc(ALGraph *G, int i,int j) { ArcNode *p; bool found = false; p=G->adjlist[i].firstarc; while (p!=NULL) { if(p->adjvex==j) { found = true; break; } p=p->nextarc; } return found; } int main() { ALGraph *G; int A[7][7]= { {0,1,1,1,0,0,0}, {0,0,0,0,1,0,0}, {0,0,0,0,1,1,0}, {0,0,0,0,0,0,1}, {0,0,0,0,0,0,0}, {0,0,0,1,1,0,1}, {0,1,0,0,0,0,0} }; ArrayToList(A[0], 7, G); printf("(1)各顶点出度:\n"); OutDs(G); printf("(2)最大出度的顶点信息:"); OutMaxDs(G); printf("(3)出度为0的顶点:"); ZeroDs(G); printf("(4)边<2,6>存在吗?"); if(Arc(G,2,6)) printf("是\n"); else printf("否\n"); printf("\n"); return 0; }















12-15
 5341
5341
5341
09-05

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









