







二叉查找树的概念和性质
二叉查找树(Binary Search Tree)是这样的一棵树:设节点x的左右孩子分别为y,z,那么key[x] <= key[z]且key[x] >= key[x],而它的以y和z分别为根的左右子树也是满足这样条件的二叉树。
二叉查找树支持多种动态集合操作,包括locate,minimum,maximum,predecessor,successor,insert以及erase等操作,既可以作为字典,也可以作为优先级队列。
二叉查找树上执行的基本操作的时间和树的高度成正比。对于一颗含有n个节点的完全二叉树,其高度为O(lgn),故这些操作的最坏运行时间为O(lgn)。但是,如果输入不均,那么二叉树有可能退化为线性链,那么此时的操作最坏运行时间就为O(n)了。
二叉树的结构
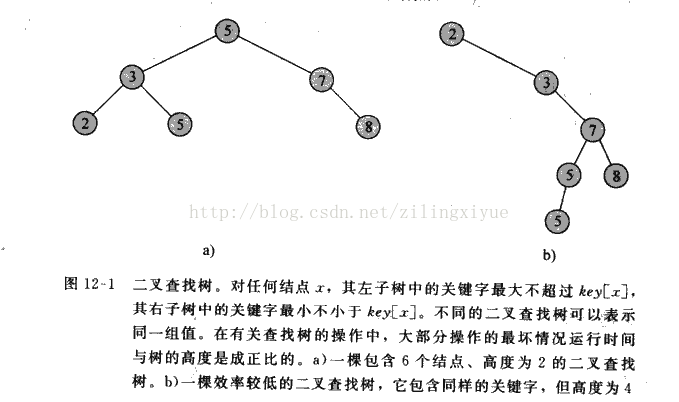
一棵二叉查找树是按二叉树结构来组织的,这样就可以用链表结构来表示,其中的每一个节点都是一个对象。节点中除了key域和一些卫星数据之外,还包含left,right和parent指针域,它们分别指向该节点的左节点,右节点和父节点。如果其中的某个指针域不存在,则将其标为NULL。根节点是唯一一个不存在父节点的节点。下图是两棵二叉查找树:
二叉查找树的操作
1、遍历
二叉树的定义是递归的,根据这一性质,可以用一个递归的算法输出二叉树中的所有关键字,根据某节点相对于其左右节点的输出顺序可以分为先根遍历、中根遍历以及后根遍历,其中中根遍历的关键字输出时从到大排序的。下面给出的是中根遍历的算法:
inTraversal(x)
{
if (x != NULL)
{
inTraversal(left[x]);
print(key[x]);
inTraversal(right[x]);
}
}显然,时间复杂度为O(n)。
2、查找
给定指向树根的指针和一个关键字,下列算法将返回指向该关键字的指针,如果不存在,则返回NULL。
locate(x, k)
{
if (x == NULL) or key[x] == k
return x;
if (k <= key[x])
return locate(left[x], k);
else
return locate(right[x], k);
}
3、最大和最小关键字
要查找二叉树中的最小关键字,只需从根节点开始一直沿着各节点的left域往左,直到遇到NULL为止。要查找最大关键字,过程与前者对称。下面是查找最小关键字的递归算法:
minimum(x)
{
if (left[x] == NULL)
return key[x];
return minimum(left[x]);
}
4、前驱和后继
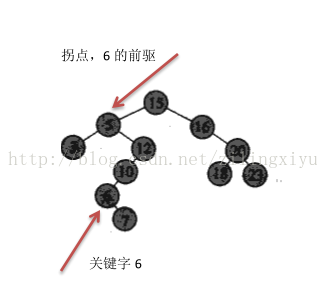
给定一个节点x,其前驱(后继)指的是按中序遍历的输出顺序中该节点的前一个关键字(后一个关键字)。如果树中各节点的关键字均不相同,则x的前驱(后继)是比key[x]小(大)的关键字里面最大(小)的。再结合二叉查找树的性质,无需比较我们就可以找到节点x的前驱(后继),即,如果x的左(右)子树不空,则其前驱(后继)是左(右)子树中的最大(小)关键字;否则,其前驱(后继)就在沿着左(右)指针一直向上遇到的第一个拐点处,如下图关键字6的前驱:
下面是寻找前驱的算法:
predecessor(x)
{
if (left[x] != NULL)
return maximum(left[x]);
y <- parent[x];
while (y != NULL && x != left[y])
{
x <- y;
y <- parent[y];
}
return y;
}
5、插入和删除
插入和删除操作会引起二叉查找树所表示的动态集合发生变化,要反映这种变化,就要修改数据结构,但在修改的过程中还要保持二叉查找树的性质。我们将看到,插入一个元素调整树形比较简单,而删除一个元素就来的比较复杂。
假设待插入节点是z,那么首先就需要找到插入位置,然后修改左右孩子以及父节点指针。下面是插入节点的算法:
insert(T,z)
{
y <- NULL;
x <- root[T];
while (x != NULL)
{
y <- x;
if (key[z] < key[x])
x <- left[x];
x <- right[x];
}
p[z] <- y;
if (y == NULL)
root[T] <- z;
else if (key[z] < key[y])
left[y] <- z;
else right[y] <- z;
}对于节点的删除,应该是二叉查找树各操作中最为繁琐的了,主要分为三种情况,设被删节点为z:
a) z是叶子节点,那么直接删除即可,并修改父节点指针;
b) z有一个孩子,那么将其删除,并根据z是其父节点哪个孩子来把z的孩子放到适当位置;
c) z有两个孩子,这是最复杂的一种情况,我们可以将其转换为上述两种情况的一种,即寻找z的后继节点(前驱也可以,我们 这里的实现是利用后继),然后将后继关键字复制到z中,然后删除后继节点。对于z节点的后继,它最多只可能有一个有一个孩子,而且这个孩子只可能为右孩子,随便找个图就能理解了。算法就不给了,下面直接给出二叉查找树C++实现源代码。
实现源代码
#include<iostream>
using namespace std;
template <typename T> class BSTree;
template <typename T>
class node
{
private:
friend class BSTree<T>;
T data;
node *left;//左孩子
node *right;//右孩子
node *parent;//父节点
public:
node(const T &d) :data(d), left(NULL), right(NULL), parent(NULL){}
T getData()const { return data; }
void setData(const T &d) { data = d; }
/*省略指针域setter和getter*/
};
template <typename T>
class BSTree
{
private:
node<T> *root;
BSTree& operator=(const BSTree&);//只声明不实现,以禁止赋值
BSTree(const BSTree&);//禁止复制构造
public:
BSTree(node<T> *r) :root(r){}//构造函数,接受一个节点指针形参
BSTree() :root(NULL){}
bool empty()const { return root == NULL; }
void insert(const T&);
void create();
node<T>* locate(const T&)const;
void preTraversal()const;
void inTraversal()const;
void erase(const T&);
void erase(node<T>*);
node<T>* minimum()const;
node<T>* maximum()const;
node<T>* successor(const T&)const;//找后继
node<T>* predecessor(const T&)const;//找前驱
void destroy();
};
template <typename T>
void BSTree<T>::insert(const T &d)
{//插入,非递归
node<T> *p = NULL, *curr = root;
while (curr != NULL)
{//找到插入位置
p = curr;
if (d <= curr->data)
curr = curr->left;
else curr = curr->right;
}
curr = new node<T>(d);
if (p == NULL)//若树为空
root = curr;
else if (d <= p->data) p->left = curr;
else p->right = curr;
curr->parent = p;
}
template <typename T>
void BSTree<T>::create()
{
T data;
cout << "Enter the value(s),CTRL+Z to end" << endl;
while (cin >> data)
insert(data);
cin.clear();
}
template <typename T>
void BSTree<T>::preTraversal()const
{//先序遍历
node<T> *curr = root;
if (curr != NULL)
{
cout << curr->data << ' ';
BSTree LEFT(curr->left);//用左子树构建一个BSTree对象,继续递归
LEFT.preTraversal();
BSTree RIGHT(curr->right);
RIGHT.preTraversal();
}
}
template <typename T>
void BSTree<T>::inTraversal()const
{//中序遍历
node<T> *curr = root;
if (curr != NULL)
{
BSTree LEFT(curr->left);
LEFT.inTraversal();
cout << curr->data << ' ';
BSTree RIGHT(curr->right);//用右子树构建一个BSTree对象,继续递归
RIGHT.inTraversal();
}
}
/*template <typename T>
node<T>* BSTree<T>::locate(const T &d)const
{//查找,非递归
node<T> *curr = root;
while(curr != NULL && curr->data != d)
{
if(curr->data > d)
curr = curr->left;
else curr = curr->right;
}
return curr;
}*/
template <typename T>
node<T>* BSTree<T>::locate(const T &d)const
{//查找递归版本
node<T> *curr = root;
if (curr == NULL || curr->data == d)
return curr;
else if (curr->data > d)
{
BSTree LEFT(curr->left);
return LEFT.locate(d);
}
else
{
BSTree RIGHT(curr->right);
return RIGHT.locate(d);
}
}
/*
template <typename T>
node<T>* BSTree<T>::minimum()const
{//求最小值,非递归
if (root == NULL) return root;
node<T> *curr = root;
while (curr->left != NULL)
curr = curr->left;
return curr;
}
*/
template <typename T>
node<T>* BSTree<T>::minimum()const
{//求最小值递归版本
if (root == NULL) return root;
node<T> *curr = root;
if (curr->left == NULL) return curr;
BSTree LEFT(curr->left);
return LEFT.minimum();
}
/*
template <typename T>
node<T>* BSTree<T>::maximum()const
{//求最大值,非递归
if (root == NULL) return root;
node<T> *curr = root;
while (curr->right != NULL)
curr = curr->right;
return curr;
}
*/
template <typename T>
node<T>* BSTree<T>::maximum()const
{//求最大值递归版本
if (root == NULL) return root;
node<T> *curr = root;
if (curr->right == NULL) return curr;
BSTree RIGHT(curr->right);
return RIGHT.maximum();
}
template <typename T>
node<T>* BSTree<T>::successor(const T &d)const
{//找后继
node<T> *p = locate(d);
if (p->right != NULL)
{//若右子树不为空,则后继为右子树的最小值
BSTree RIGHT(p->right);
return RIGHT.minimum();
}
node<T> *par = p->parent;
while (par != NULL && par->right == p)
{//若为空,则后继在沿右指针反向而上第一个拐点处
p = par;
par = p->parent;
}
return par;
}
template <typename T>
node<T>* BSTree<T>::predecessor(const T &d)const
{
node<T> *p = locate(d);
if (p->left != NULL)
{//若左子树部位空,则前驱为左子树最大值
BSTree LEFT(p->left);
return LEFT.maximum();
}
node<T> *par = p->parent;
while (par != NULL && par->left == p)
{//若为空,则前驱在沿左指针反向而上第一个拐点处
p = par;
par = p->parent;
}
return par;
}
template <typename T>
void BSTree<T>::erase(node<T> *p)
{
node<T> *next, *child;
if (p->left == NULL || p->right == NULL)
next = p;//确定删除节点,若其最多有一个子女
else next = successor(p->data);
if (next->left != NULL)
child = next->left;//取被删节点的子女,用以代替其位置,它最多有一个子女
else child = next->right;
if (child != NULL)//被删节点有子女
child->parent = next->parent;
if (next->parent == NULL)//若要删除的节点为根节点
root = child;
else if (next == next->parent->left)//若被删节点为其父节点的左孩子
next->parent->left = child;
else next->parent->right = child;//若为右孩子
if (next != p)
p->data = next->data;
delete next;//释放节点
}
template <typename T>
void BSTree<T>::erase(const T &d)
{//删除一个节点
node<T> *p = locate(d);
erase(p);
}
template <typename T>
void BSTree<T>::destroy()
{//销毁二叉树
<pre class="cpp" name="code"> if(root == NULL) return;
if(root->left != NULL)
{
BSTree<T> LEFT(root->left);
LEFT.destroy();
}
if(root->right != NULL)
{
BSTree<T> RIGHT(root->right);
RIGHT.destroy();
}
delete root;
}
int main()
{//12 5 18 2 9 15 19 17
BSTree<int> btree;
cout << "btree.create()" << endl;
btree.create();
cout << "btree.inTraversal()" << endl;
btree.inTraversal();
btree.destroy();
cout << "btree.inTraversal()" << endl;
btree.inTraversal();
getchar();
return 0;
}
在我们的源代码实现中,对于locate、minimum、maximum操作既给出了递归版本,也给出了非递归版本;对于erase操作给出了两个版本,一个是根据节点指针来删除,一个是根据关键字来删除,后者在查找到该节点后调用前者来实现删除。
注意:在很多程序中,递归的时候都是直接创建左右子树的,因而对于这棵树我们最好不要定义能够销毁节点的析构函数,不然会析构子树对象,最好在程序结束时调用destroy函数。















 868
868

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









