







 本文介绍了河北中洺科技在自动驾驶3D点云数据标注中的关键技巧,包括理解标注场景、定义标注类型、3D点云语义分割、选择关键点、2D3D融合标记和3D点云目标检测。这些技术对于提高标注的准确性和自动驾驶系统的性能至关重要。
本文介绍了河北中洺科技在自动驾驶3D点云数据标注中的关键技巧,包括理解标注场景、定义标注类型、3D点云语义分割、选择关键点、2D3D融合标记和3D点云目标检测。这些技术对于提高标注的准确性和自动驾驶系统的性能至关重要。
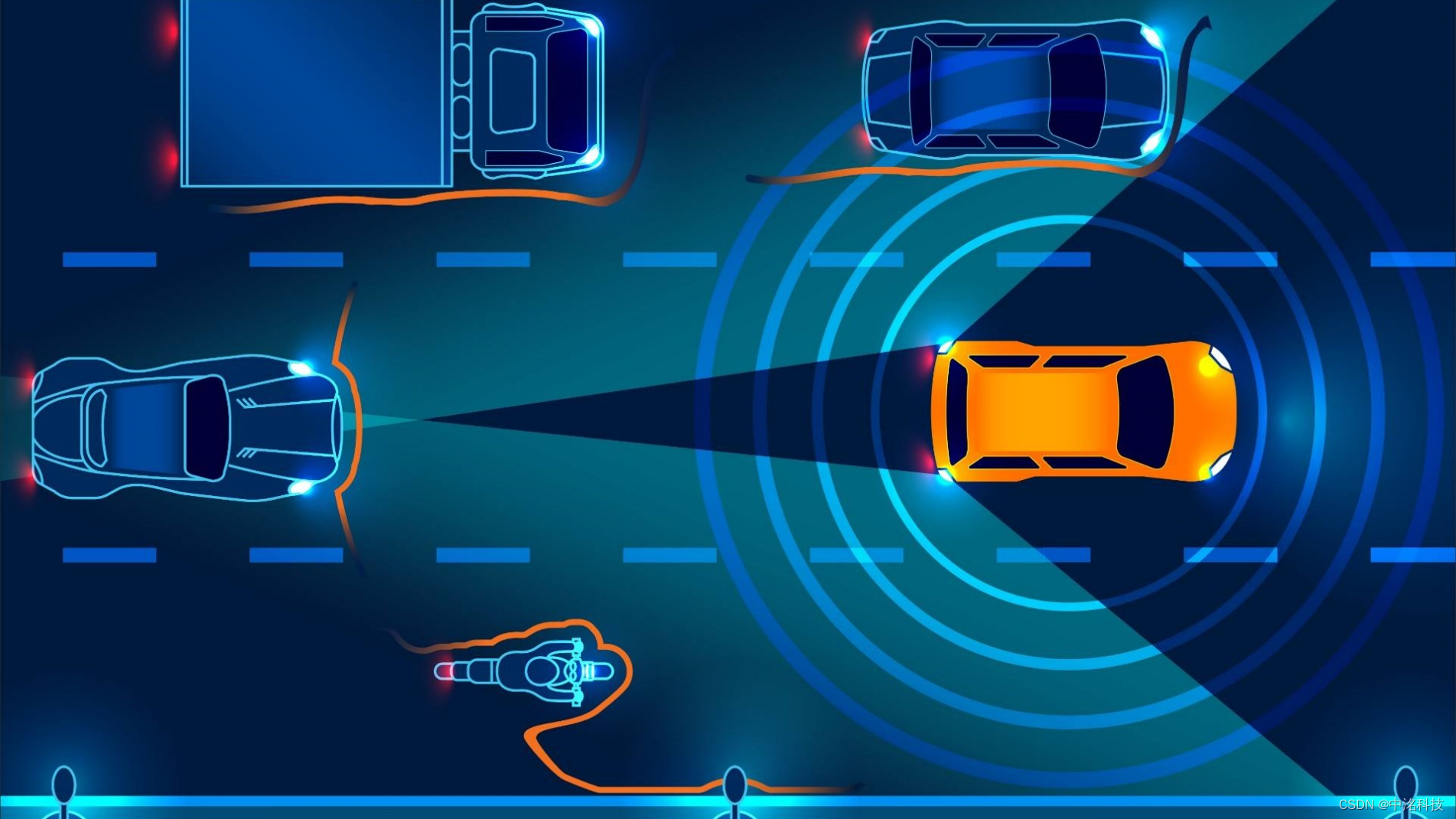
数据标记自动驾驶时代将会到来,河北中洺科技教育数据标注也会变得越来越重要。3D点云数据无人驾驶标注是一项复杂的任务,需要一些技巧来实现高准确的标记。河北中洺科技严控数据安 全保护措施,将标审分离,有效提升效率和准确率,确保专业性和数据高准确率。以下是标记无人驾驶3D点云数据的一些技术:
了解场景:在标注之前,你需要充分了解标注场景,包括环境、目标物体及其特征。这可以帮助注释者更 好地理解被注释的对象,从而提高注释的准确性。
定义标注类型:根据标注场景和需求,确定标注类型,如分类标注、目标姿态标注等。不同的注释类型需要不同的注释方法和技术。
3D点云语义分割:3D点云语义分割在很多领域都有应用,比如自动驾驶、机器人等。目前已经成为场景理解的关键。在自动驾驶领域,道路环境的点云数据可以通过3D点云语义分割技术进行分割,可以很好的识别道路上的行人、汽车等物体,帮助车辆了解周围的道路环境。这项技术可以应用在无人驾驶汽车上,可以大大提高汽车对周围环境的理解。
选择关键点:在河北中洺科技数据标注目标对象时,需要标注对象的关键点和特征,以保证准确性和一致性。3D点云的关键点可以通过定义检测标准获得稳定的、可区分的点集。在技术上,3D点云的关键点数量比原始点云少得多,关键点技术已经成为3D信息处理中 非常关键的技术。这些关键点可以包括诸如物体的边缘和角的特征。
2D3D融合标记:2D
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









