






原文链接:NOIP真题第三讲:奶酪
题目来源:2017 年 NOIP 提高组 第一题
本题考察点:【DFS、BFS、并查集】
一、题目及链接
题目链接:
https://www.luogu.com.cn/problem/P3958
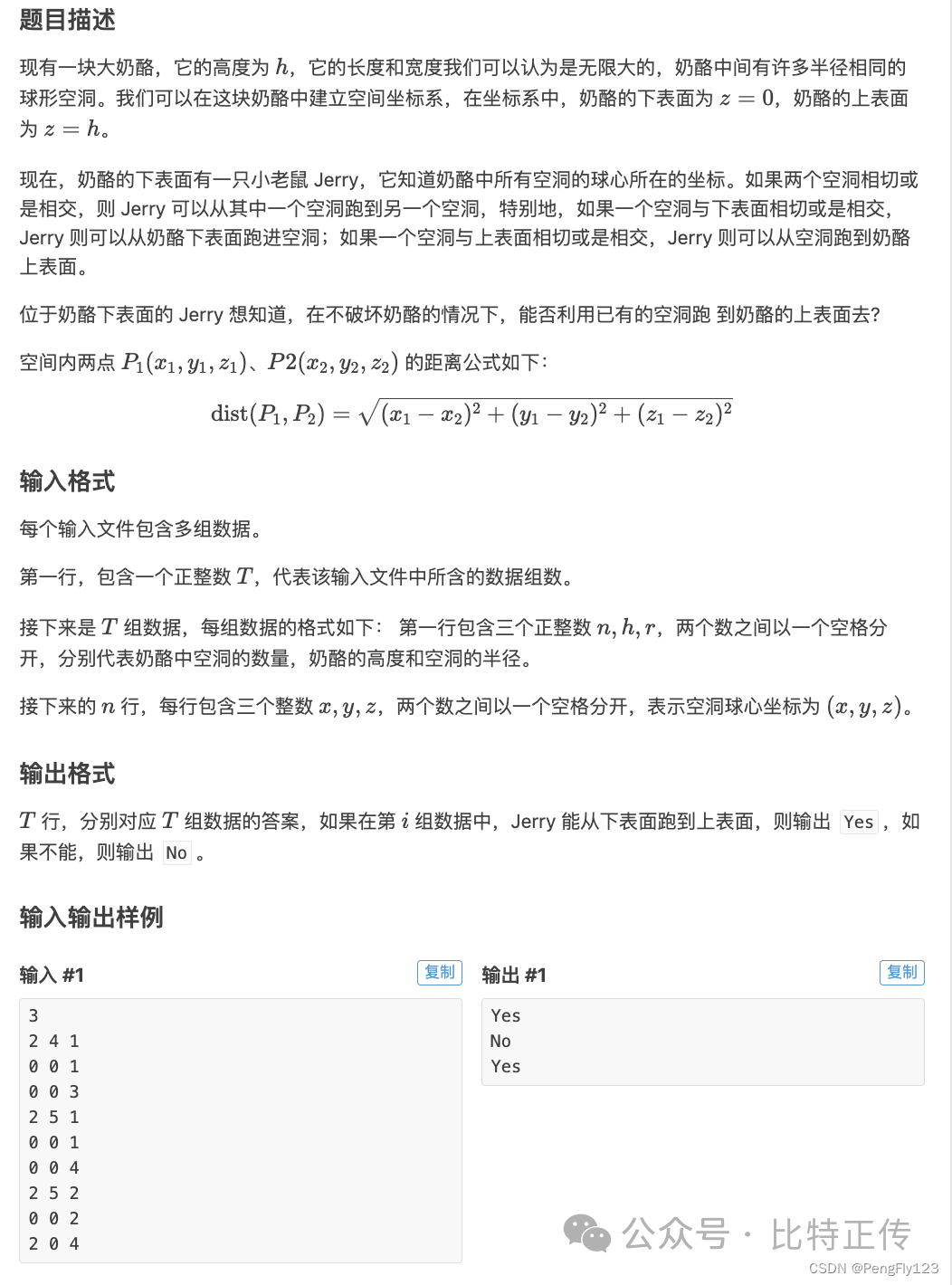
题意:老鼠是否可以从下表面的空洞一直沿着空洞走到上表面,如果可以,输出Yes,否则输出No;
二、问题分析
该题可以通过搜索来实现,找出所有的入口(即与下表面相切或相交的空洞)作为搜索的入口,在搜索的过程中,对已经搜过的空洞进行标记,每搜到一个空洞,判断是否为出口(即该空洞与上表面相交或相切),如果是,输出Yes,然后return,否则继续搜索,直到以所有入口为起点搜索完,还未找到出口,则说明不能从入口到出口,输出No并返回即可。
该问题还可以使用并查集来解决,暴力遍历任意两个空洞,检查,如果两个空洞相交或相切,则合并,遍历结束后,再分别遍历所有入口和出口,如果任意两个入口和出口是并查集中的同一合集,则说明可以从入口到出口,输出Yes,否则输出No;
三、问题解决
Q1: 如何判断一个空洞为入口或出口呢?
A1:如果为入口,则空洞的纵坐标z小于等于半径r;如果为出口,则空洞的纵坐标z加上半径r大于等于高度h;
Q2: 如何判断两个空洞是否相交或相切?
A2: 两个空洞的球心坐标距离小于等于半径的2倍即说明相交或相切。
Q3: 搜索过程中如何标记哪些点已经被搜索过呢?
A3: 用bool类型的vis数组标记。
下面我会分别使用DFS、BFS和并查集实现一次,请结合代码和注释一起阅读和思考。
四、AC Code
DFS
#include "bits/stdc++.h"
using namespace std;
const int N = 1e3+7;
long long t, n, h, r;
bool vis[N];
struct Node{ // 球心坐标
int x, y ,z;
}a[N];
// 计算两点之间的距离,为避免小数,返回距离的平方(即省去开根号)
long long dist(int idx1, int idx2) {
return pow(a[idx1].x-a[idx2].x, 2) + pow(a[idx1].y-a[idx2].y, 2) +
pow(a[idx1].z-a[idx2].z, 2);
}
// 检查两个空洞是否相切,相切或相交返回true,否则返回false
bool check(int idx1, int idx2) {
long long d = 4*r*r;
if(dist(idx1, idx2) <= d) return true;
return false;
}
// 判断是否为入口
bool isIn(int idx) {
return a[idx].z <= r;
}
// 判断是否为出口
bool isOut(int idx) {
return a[idx].z + r >= h;
}
// 从第idx个空洞是否可以搜索到出口,如果可以搜索到出口,返回true,否则返回false
bool dfs(int idx) {
if(vis[idx]) return false; // 已经被搜索过,返回false
if(isOut(idx)) return true; // 搜索到了出口,返回true
vis[idx] = true; // 标记
for(int i=1; i<=n; i++) {
if(vis[i]) continue; // 搜索过的不再搜索
if(check(idx, i) && dfs(i)) return true; // 如果相交且能搜索出口,返回true
}
return false;
}
int main(){
cin >> t;
while(t--) {
cin >> n >> h >> r;
memset(vis, false, sizeof vis);
for(int i=1; i<=n; i++) {
cin >> a[i].x >> a[i].y >> a[i].z;
}
bool isTrue = false;
for(int i=1; i<=n; i++) {
// 如果没有被访问过且是入口且搜索到了出口,则输出YES,并结束本组数据,看下一组数据
if(!vis[i] && isIn(i) && dfs(i)) {
cout << "Yes" << endl;
isTrue = true;
break;
}
}
if(!isTrue) cout << "No" << endl; // 如果没输出YES,则输出NO
}
return 0;
}
BFS
#include "bits/stdc++.h"
using namespace std;
const int N = 1e3+7;
long long t, n, h, r;
bool vis[N];
queue<int> q;
struct Node{ // 球心坐标
int x, y ,z;
}a[N];
// 计算两点之间的距离,为避免小数,返回距离的平方(即省去开根号)
long long dist(int idx1, int idx2) {
return pow(a[idx1].x-a[idx2].x, 2) + pow(a[idx1].y-a[idx2].y, 2) +
pow(a[idx1].z-a[idx2].z, 2);
}
// 检查两个空洞是否相切,相切或相交返回true,否则返回false
bool check(int idx1, int idx2) {
long long d = 4*r*r;
if(dist(idx1, idx2) <= d) return true;
return false;
}
// 判断是否为入口
bool isIn(int idx) {
return a[idx].z <= r;
}
// 判断是否为出口
bool isOut(int idx) {
return a[idx].z + r >= h;
}
void bfs() {
while(!q.empty()) {
int head = q.front(); // 拿出队头
if(isOut(head)) { // 如果队头为出口
cout << "Yes" << endl; // 输出并返回
return;
}
q.pop(); // 弹出队头
for(int i=1; i<=n; i++) {
if(!vis[i] && check(i, head)) { // 没有访问并相交
vis[i] = true;
q.push(i); // 加入队列
}
}
}
cout << "No" << endl;
return ;
}
int main(){
cin >> t;
while(t--) {
cin >> n >> h >> r;
memset(vis, false, sizeof vis);
while(!q.empty()) q.pop();
for(int i=1; i<=n; i++) {
cin >> a[i].x >> a[i].y >> a[i].z;
if(isIn(i)) { // 将所有的入口放入队列
q.push(i);
vis[i] = true; // 并标记
}
}
bfs();
}
return 0;
}

并查集
#include "bits/stdc++.h"
using namespace std;
const int N = 1e3+7;
long long t, n, h, r;
unordered_set<int> st;
struct Node{ // 球心坐标
int x, y ,z;
}a[N];
int p[N]; // 并查集中的parent数组,p[i]表示i的父亲,初始时p[i]等于i,表示自己是自己的父亲
// 计算两点之间的距离,为避免小数,返回距离的平方(即省去开根号)
long long dist(int idx1, int idx2) {
return pow(a[idx1].x-a[idx2].x, 2) + pow(a[idx1].y-a[idx2].y, 2) +
pow(a[idx1].z-a[idx2].z, 2);
}
// 检查两个空洞是否相切,相切或相交返回true,否则返回false
bool check(int idx1, int idx2) {
long long d = 4*r*r;
if(dist(idx1, idx2) <= d) return true;
return false;
}
// 寻找child的根父亲节点,并查集的模板
int findFather(int child) {
if(child == p[child]) return p[child];
p[child] = findFather(p[child]); // 并查集的压缩路径
return p[child];
}
// 合并两个空洞为一个集合,并查集的模板
void unionFind(int idx1, int idx2) {
int p1 = findFather(idx1), p2 = findFather(idx2); // 找到各自的根父亲
if(p1 != p2) p[p1] = p2; // 如果两个根父亲不是一个节点,则合并
return;
}
// 判断是否为入口
bool isIn(int idx) {
return a[idx].z <= r;
}
// 判断是否为出口
bool isOut(int idx) {
return a[idx].z + r >= h;
}
// 初始化st为空,且p数组中p[i]=i;
void init() {
for(int i=1; i<=n; i++) p[i] = i;
st.clear();
}
int main(){
cin >> t;
while(t--) {
cin >> n >> h >> r;
init(); // 更新p数组
for(int i=1; i<=n; i++) {
cin >> a[i].x >> a[i].y >> a[i].z;
}
for(int i=1; i<n; i++) {
for(int j=i+1; j<=n; j++) {
if(check(i, j)) unionFind(i, j); // 搜索任意两个空洞,如果相切或相交,合并
}
}
for(int i=1; i<=n; i++) {
if(isIn(i)) { // 如果第i个空洞为入口,则将其根父节点加入到st集合中
int f = findFather(i); // 找到根父节点
st.insert(f); // 插入st
}
}
bool isTrue = false; // 是否找到相连的入口和出口
for(int i=1; i<=n; i++) { // 遍历所有空洞
// 如果是入口且该节点和出口有共同的根父节点,则一定可以到出口
if(isOut(i) && st.count(findFather(i)) > 0) {
cout << "Yes" << endl;
isTrue = true;
break;
}
}
if(!isTrue) cout << "No" << endl; // 如果isTrue为false,说明不能从入口到出口,输出NO;
}
return 0;
}















 173
173











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









