







在Linux下,串口设备显示在/dev目录下,如果用的是USB转的串口,我们执行下面的命令:
ls /dev/ | grep tty
就可以看到下面的信息:
ttyUSB0
ttyUSB1
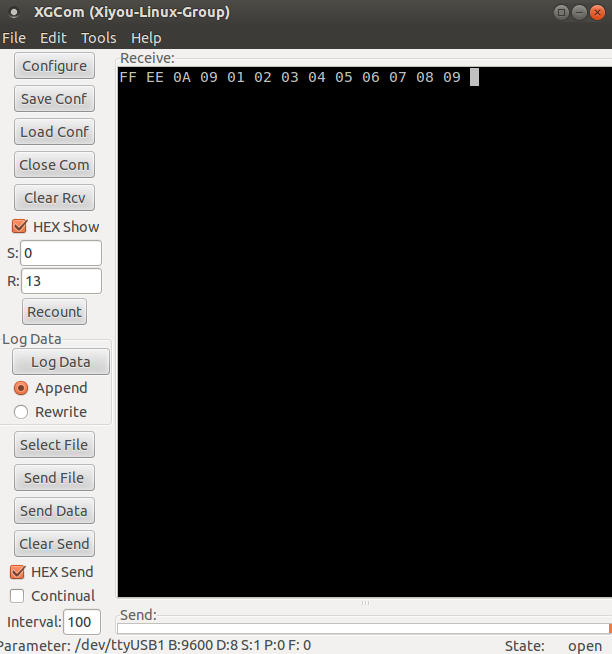
在Linux操作系统下,一切皆文件,我们读写这两个文件就是利用串口接收和发送数据。可以用一根母对母的交叉线,将两个串口连接起来,在一端发送数据,另外一端就能收到数据。我们可以用一个叫做XGCom的工具测试。我们在ttyUSB0这端发送数据,在ttyUSB1那边就可以收到数据。

当然我们也可以用C++编程读写串口,代码如下:
/*
* SerialPort.h
*
* Created on: 2014年11月3日
* Author: Richard
*/
#ifndef SERIALPORT_H_
#define SERIALPORT_H_
#include <stdio.h>
#include <fcntl.h>
#include <pthread.h>
//Message Format: head:2 bytes(0xFF,0xEE) | Command:1 byte | Data Size:1 byte | Data:DataSize bytes
static const int HeadLen = 2;
static const int CommandLen = 1;
static const int DataSizeLen = 1;
class SerialPort
{
public:
SerialPort();
virtual ~SerialPort();
bool Setup(const char *PortName, int BaudRate, int ByteSize, int Parity, int StopBit);
bool Shutdown();
bool CheckBuffer();
void AdvanceBuffer(int Len);
virtual void OnRecv();
private:
static void *ReadFunc(void *Param);
int m_PortHandle;
pthread_t m_ThreadID;
unsigned char m_Buffer[1024];
int m_BufferSize;
bool m_ThreadRunning;
};
#endif /* SERIALPORT_H_ */
/*
* SerialPort.cpp
*
* Created on: 2014年11月3日
* Author: jason
*/
#include "SerialPort.h"
#include <unistd.h>
#include <string.h>
#include <signal.h>
#include <termios.h>
SerialPort::SerialPort()
{
// TODO Auto-generated constructor stub
m_PortHandle = -1;
m_ThreadID = -1;
memset(m_Buffer, 0, 1024);
m_BufferSize = 0;
m_ThreadRunning = true;
}
SerialPort::~SerialPort()
{
// TODO Auto-generated destructor stub
}
bool SerialPort::Setup(const char *PortName, int BaudRate, int ByteSize,
int Parity, int StopBit)
{
m_PortHandle = open(PortName, O_RDWR | O_NOCTTY | O_NDELAY);
if (m_PortHandle < 0) {
return false;
}
struct termios Opt;
tcgetattr(m_PortHandle, &Opt);
Opt.c_cflag |= (CLOCAL | CREAD); //设置控制模式状态,本地连接,接收使能
Opt.c_cflag &= ~CSIZE; //字符长度,设置数据位之前一定要屏掉这个位
Opt.c_cflag &= ~CRTSCTS; //无硬件流控
Opt.c_cflag |= CS8; //8位数据长度
Opt.c_cflag &= ~CSTOPB; //1位停止位
Opt.c_iflag |= IGNPAR; //无奇偶检验位
Opt.c_oflag = 0; //输出模式
Opt.c_lflag = 0; //不激活终端模式
cfsetospeed(&Opt, B9600); //设置波特率
tcflush(m_PortHandle, TCIFLUSH); //溢出数据可以接收,但不读
tcsetattr(m_PortHandle, TCSANOW, &Opt); //TCSANOW:所有改变立即生效
pthread_create(&m_ThreadID, NULL, ReadFunc, this);
return true;
}
bool SerialPort::Shutdown()
{
m_ThreadRunning = false;
pthread_join(m_ThreadID, NULL);
close(m_PortHandle);
return true;
}
void SerialPort::AdvanceBuffer(int Len)
{
for (int i = Len; i < m_BufferSize; i++)
{
m_Buffer[i - Len] = m_Buffer[i];
}
for (int i = m_BufferSize - Len; i < m_BufferSize; i++)
{
m_Buffer[i] = 0;
}
m_BufferSize -= Len;
}
void SerialPort::OnRecv()
{
if (CheckBuffer())
{
int TotalLen = HeadLen + CommandLen + DataSizeLen + m_Buffer[3];
char buff[200];
memset(buff, 0, 200);
int Index = sprintf(buff, "Received Data: ");
for (int i = 0; i < TotalLen; i++)
{
Index += sprintf(buff + Index, "%.2X ", m_Buffer[i]);
}
sprintf(buff + Index, "\n");
printf(buff);
write(m_PortHandle, m_Buffer, TotalLen);
AdvanceBuffer(TotalLen);
}
}
bool SerialPort::CheckBuffer()
{
bool Ret = false;
if (m_BufferSize >= HeadLen + CommandLen + DataSizeLen )
{
if (m_Buffer[0] == 0xFF && m_Buffer[1] == 0xEE)
{
int TotalLen = HeadLen + CommandLen + DataSizeLen + m_Buffer[3];
if ((m_Buffer[TotalLen] == 0xFF || m_Buffer[TotalLen] == 0x00) &&
m_Buffer[TotalLen - 1] != 0x00)
{
Ret = true;
}
}
}
return Ret;
}
void *SerialPort::ReadFunc(void *Param)
{
SerialPort *Port = (SerialPort *)Param;
fd_set HandleSet;
while(1)
{
FD_ZERO(&HandleSet);
FD_SET(Port->m_PortHandle, &HandleSet);
struct timeval tv;
tv.tv_sec = 1;
tv.tv_usec = 0;
int Ret = select(Port->m_PortHandle + 1, &HandleSet, NULL, NULL, &tv);
if (Ret < 0) {
break;
}
if (FD_ISSET(Port->m_PortHandle, &HandleSet)) {
int Len = read(Port->m_PortHandle, Port->m_Buffer + Port->m_BufferSize, 100);
if (Len > 0) {
Port->m_BufferSize += Len;
Port->OnRecv();
}
}
if (Port->m_ThreadRunning == false) {
break;
}
}
return NULL;
}
我们在main函数里面写下测试代码:
/*
* main.cpp
*
* Created on: 2014年12月3日
* Author: Richard
*/
#include "SerialPort.h"
#include <unistd.h>
int main(int argc, char **argv) {
SerialPort Port;
Port.Setup("/dev/ttyUSB1", 9600, 8, 0, 0);
for (int i = 0; i < 20; ++ i) {
sleep(1);
}
Port.Shutdown();
return 0;
}
然后以root权限执行:

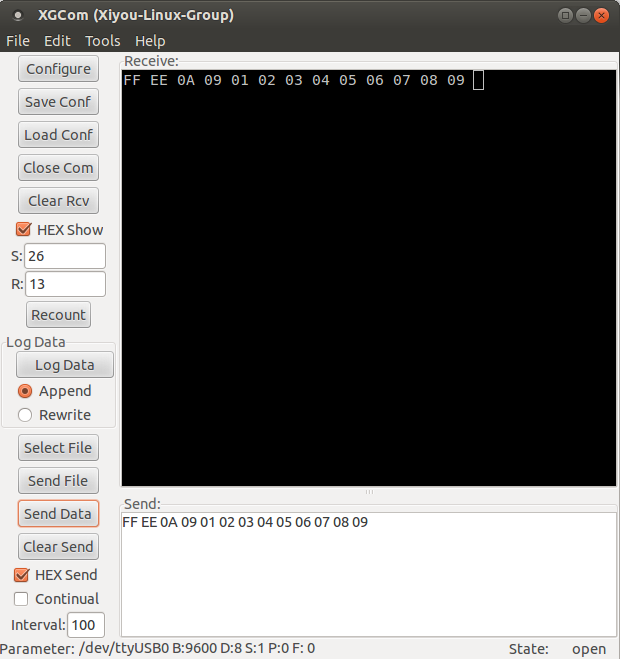
我们用XGCom打开/dev/ttyUSB0,然后发送0xFFEE0A09010203040506070809,在控制台那边就显示收到的数据。我们程序打开的是/dev/ttyUSB1,然后我们用收到的数据写/dev/ttyUSB1,这样XGCom那里也收到了数据。就是我们刚才发送的数据。















 1819
1819











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









