






 本文详细探讨了矩阵求逆在各领域的应用,包括待定系数法、伴随矩阵求逆、高斯-约旦消元、LU分解和Cholesky分解。这些方法在解决线性方程、优化问题、密码学和信号处理中扮演关键角色,特别强调了Cholesky分解在对称正定矩阵求逆中的高效性。
本文详细探讨了矩阵求逆在各领域的应用,包括待定系数法、伴随矩阵求逆、高斯-约旦消元、LU分解和Cholesky分解。这些方法在解决线性方程、优化问题、密码学和信号处理中扮演关键角色,特别强调了Cholesky分解在对称正定矩阵求逆中的高效性。
目录
前言
矩阵求逆在线性代数和数学应用中具有重要性,它对多个领域和问题都有关键作用,例如:
-
解线性方程组: 矩阵求逆是解线性方程组的基本方法之一。对于形如Ax = b的线性方程组,如果矩阵A可逆,那么可以通过x = A^(-1)b来精确地求解未知向量x。这在工程、物理、经济学等领域中都有广泛的应用。
-
线性变换的逆: 在线性代数中,矩阵表示了线性变换。矩阵的逆可以用来反转线性变换,这对于恢复原始数据、解码信息、还原图像等任务非常重要。
-
优化问题: 在数学优化和机器学习中,求解一些优化问题时需要计算矩阵的逆。例如,在最小二乘法中,需要求解一个矩阵方程,其中矩阵的逆用于最小化误差。
-
密码学和安全: 矩阵的逆也在密码学和信息安全中扮演着关键角色。例如,在公钥密码学中,矩阵的逆用于加密和解密消息。
-
信号处理:矩阵求逆可以用于设计数字滤波器,尤其是在频域中,通过对滤波器的频率响应进行矩阵求逆操作,可以得到所需的滤波器系数。
总之,矩阵求逆在数学、科学和工程的多个领域中都具有广泛的应用,下面对不同的矩阵求逆方法做简要分析
一、待定系数法
此方法仅适合阶数较低的可逆矩阵的求逆,下面举例分析使用方法。
待求逆矩阵A:
矩阵A的逆阵B假设为:
矩阵A和矩阵B互为逆阵,则有:
A*B=E
即:
则有
解之得:
所以,矩阵A的逆阵为:
待定系数法矩阵求逆过程至此结束,可以看出,对于二阶矩阵求逆需要求四元一次方程组,若对于三姐矩阵求逆,则需要求九元一次方程组,同理,对于N阶矩阵求逆,需要求解N^2元一次方程,其复杂度大大提高,因此只适用于低阶数矩阵求逆。下面介绍另外一种矩阵求逆方法。
二、伴随矩阵求逆
首先介绍一下矩阵理论中的几个重要概念:
1、余子式:
一个n × n的矩阵A,删除矩阵A中第i行和第j列得到的(n-1)阶行列式,即为元素
的余子式
。
2、代数余子式:
需要注意的是,不管余子式还是代数余子式,都与aij无关
示例:
对应的余子式及代数余子式分别为:
对应的余子式及代数余子式分别为:
其中,“×”代表删除的元素。
性质(行列式与代数余子式的关系):
行列式等于它的任一行(或列)的所有元素分别与其所对应的代数余子式乘积之和
按行:
按列:
3、伴随矩阵:
伴随矩阵与代数余子式矩阵互为转置关系,即:
4、矩阵求逆
5、示例分析
- 设待求逆矩阵A为:
- 余子式分别为:
- 余子式矩阵为:
- 代数余子式矩阵为:
- 伴随矩阵为:
- 矩阵A的行列式为:
以第一行为例:
以第二行为例:
可以看出,无论取哪一行,当前行所有元素分别与其所对应的代数余子式乘积之和即为矩阵A的行列式
逆矩阵为:
三、高斯—约旦消元法矩阵求逆
1、一般流程
首先介绍高斯—约旦消元法求矩阵的逆的一般流程,假设有一个n阶方阵A:
- 增广矩阵: 将矩阵A与同阶单位阵E水平拼接,形成一个新的增广矩阵[A | E];
- 初等行变换: 使用高斯-约旦消元法,将增广矩阵[A | E]做初等变换后,变换为形如[A' | B]的上三角矩阵,其中A'是矩阵A的行阶梯形式;
- 单位矩阵:继续使用高斯-约旦消元法,将上三角矩阵[A' | B]变为一个单位矩阵[E | A^(-1)];
- 逆矩阵:最终的矩阵[E | A^(-1)]中的A^(-1)部分就是原始矩阵A的逆矩阵;
2、示例分析
设待求逆矩阵A为:
增广矩阵为:
初等行变换:
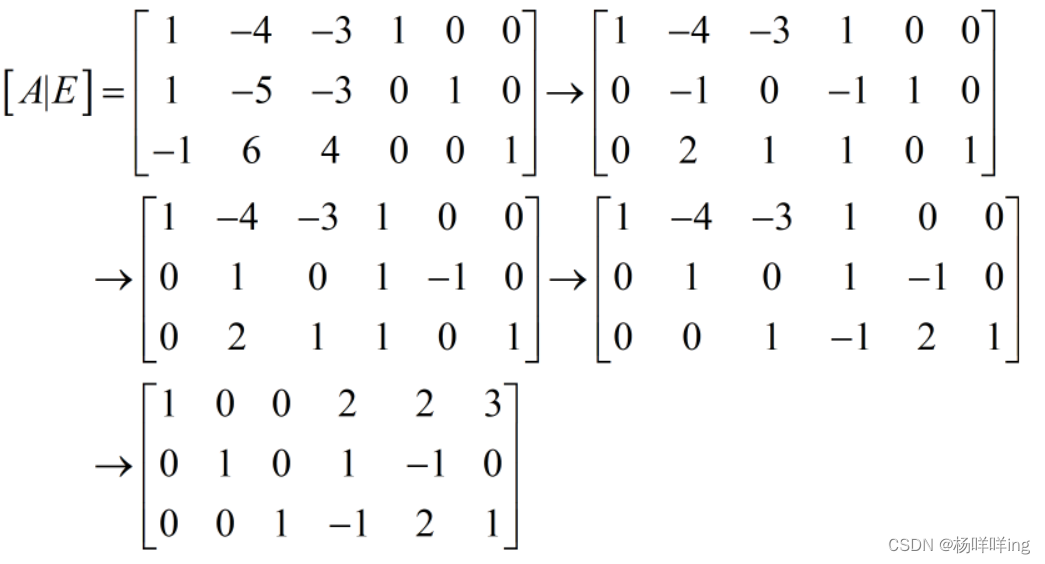
根据第一部分矩阵求逆流程可以看出,矩阵A的逆矩阵为:
四、LU分解法矩阵求逆
1、LU分解
矩阵A为:
进行LU分解:
消元的基本顺序(以4阶可逆方阵为例)为:
需要注意的是,在LU分解时,其消元过程固定且唯一,必须首先使第一行做主元,然后向下依次消元得到一个上三角矩阵,此上三角矩阵即为LU分解后的U矩阵。而对于一个n阶可逆方阵而言,以第一行为主元时,消元次数为(n-1)次,以第二行为主元时,消元次数为(n-2)次,以此类推,以第(n-1)行为主元时,消元次数为1次,因此总消元次数为
对A矩阵执行初等行变换过程如下:
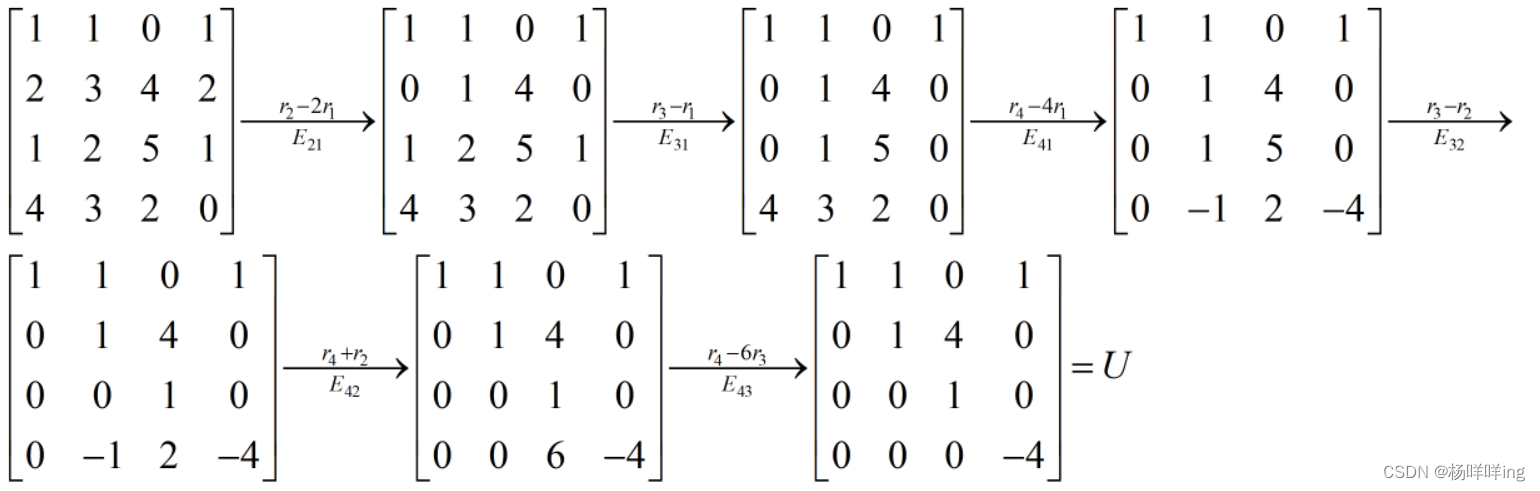
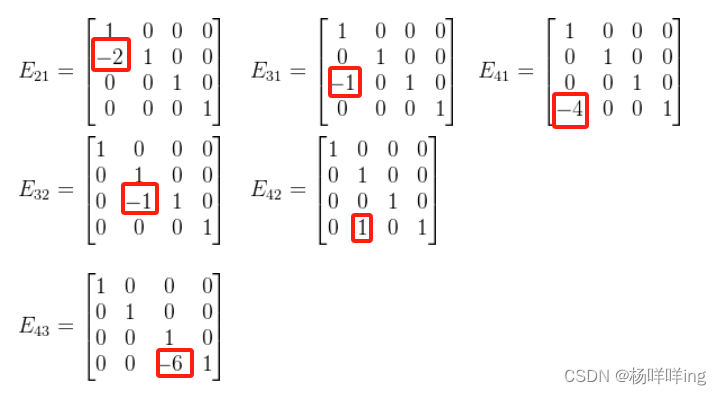
初等行变换后的矩阵即为LU分解后的U矩阵,可以用公式表示如下:
其中:
则A矩阵可以表示为:
计算得出:
根据上述初等变换可以看出,L矩阵对应位置即为初等变换系数的相反数,如下标红位置,例如,L
矩阵在(2,1)位置处的值为2,对应(2,1)处系数的相反数。
由上所述,矩阵A经过LU分解后表示如下:
2、矩阵求逆
此时,矩阵求逆问题即转换为求上三角矩阵和下三角矩阵的逆阵。
可求得矩阵L和U的逆阵分别为:
3、注意事项
使用LU分解法进行矩阵求逆流程到此结束,需要说明的是使用该方法的注意事项:
矩阵可逆性: LU分解法只适用于可逆矩阵。确保矩阵是非奇异的(可逆的),否则求逆将会失败。
矩阵分解: 在求解逆之前,必须先对矩阵进行LU分解。确保LU分解的计算正确无误。
数值稳定性: 对于数值稳定性较差的矩阵,如接近奇异矩阵的情况,LU分解可能会面临数值精度损失的问题。在处理这些情况时需要额外小心。
分解结果的利用: 一旦完成了LU分解,可以重复利用这个分解结果求解多个线性方程组或者多个矩阵的逆。这可以节省计算时间。
存储开销: LU分解法需要存储两个三角矩阵 L 和 U,可能会占用额外的内存空间。考虑存储空间的消耗,特别是对于大型矩阵。
库和算法选择: 使用现有的数值计算库(如NumPy、SciPy等)提供的LU分解算法可能是明智的选择。这些库通常实现了优化的算法,能够更高效地进行LU分解和求解逆矩阵。
五、Cholesky分解法矩阵求逆
第四章分别介绍了LU分解求逆的具体原理及流程,且该方法适用于任何非奇异矩阵,对特殊矩阵(对称正定矩阵)而言其计算复杂度并没有改善,而这种特殊矩阵的应用非常广泛,因此需要一种针对这种特殊矩阵的矩阵求逆方法,在保证数值稳定性的前提下能够进一提高计算效率,而这种方法就是Cholesky分解矩阵求逆法(本文仅介绍使用方法,不介绍具体推导过程),此方法将对称正定矩阵分解为一个下三角矩阵与其转置的乘积:
其中,L为下三角矩阵,对于实数矩而言,矩阵L具有实数和正数对角元素。
1、Cholesky分解流程
假设有一个n×n的实对称正定矩阵A, 通过上述关系式反推下三角矩阵的元素值。
为了方便计算,本文以3×3的矩阵举例。 矩阵A为:
分解关系后:
则:
正定矩阵A经过分解之后的下三角矩阵为:
Cholesky分解流程公式整理如下:
- 初始化:初始化一个与A维度相同的下三角矩阵L。
- 计算Cholesky分解:逐步计算L的元素以完成Cholesky分解。
a. 对角线元素:计算
,其中i=1,2,…,n。这里的
表示L已经计算出来的元素的平方和。
b.非对角元素:对于i>j,计算
c.对于i<j,。因为对称矩阵的Cholesky分解是下三角矩阵。
根据Cholesky分解流程的计算公式,可以求得下三角矩阵的元素分别如下:
正定矩阵A经过分解之后的下三角矩阵为:
经验证,分解后的结果正确。
2、矩阵求逆
由上节叙述可以推导出A的逆阵关系式如下:
可以求得矩阵A的逆为:
向读者朋友推荐一个矩阵计算器,是我在写文章的时候无意间发现的宝藏网站,仅供参考。


















 3289
3289

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









