







HEVC帧间预测在AMVP模式下是依靠xEstimateMvPredAMVP函数获取预测MV(MVP)的。
这部分内容的学习还可以参考这两篇博客:
HEVC代码学习15:AMVP相关函数
HM编码器代码阅读(16)——帧间预测之AMVP模式(四)预测MV的获取
xEstimateMvPredAMVP
xEstimateMvPredAMVP的作用是建立MVP列表并获取最优MVP,最终将最优MVP以及其索引等信息返回给上层函数——preInterSearch
xEstimateMvPredAMVP的基本流程如下:
(1)判断bFilled标识,该标识表示MVP候选列表是否已经建好;
(2)如果bFilled是false,通过fillMvpCand获取MVP候选列表;否则,不需要重新建立MVP候选列表
(3)先把MVP候选列表中的第一个MVP作为最优的MVP
(4)如果候选列表中MVP的数量小于等于1,那么直接把步骤3选出的MVP返回
(5)如果bFilled是true,表示MVP候选列表是原来已经建立好的,那么直接根据PU的相关信息得到最优的MVP,然后返回
(6)遍历MVP候选列表,选出代价最小的MVP作为当前PU的MVP,并设置相关信息,然后返回
xEstimateMvPredAMVP代码如下:
Void TEncSearch::xEstimateMvPredAMVP( TComDataCU* pcCU, TComYuv* pcOrgYuv, UInt uiPartIdx, RefPicList eRefPicList, Int iRefIdx, TComMv& rcMvPred, Bool bFilled, Distortion* puiDistBiP )
{
AMVPInfo* pcAMVPInfo = pcCU->getCUMvField(eRefPicList)->getAMVPInfo();
TComMv cBestMv; //最优MV
Int iBestIdx = 0; //最优MV在候选中的索引
TComMv cZeroMv;
TComMv cMvPred;
Distortion uiBestCost = std::numeric_limits<Distortion>::max();
UInt uiPartAddr = 0; // PU地址
Int iRoiWidth, iRoiHeight; // PU长宽
Int i;
Int minMVPCand;
Int maxMVPCand;
// 获取当前PU的索引和大小
pcCU->getPartIndexAndSize( uiPartIdx, uiPartAddr, iRoiWidth, iRoiHeight );
// Fill the MV Candidates
if (!bFilled)
{
pcCU->fillMvpCand( uiPartIdx, uiPartAddr, eRefPicList, iRefIdx, pcAMVPInfo ); // 建立MVP候选列表
}
// initialize Mvp index & Mvp
#if MCTS_ENC_CHECK
if (m_pcEncCfg->getTMCTSSEITileConstraint() && pcCU->isLastColumnCTUInTile() && (pcAMVPInfo->numSpatialMVPCandidates < pcAMVPInfo->iN))
{
iBestIdx = (pcAMVPInfo->numSpatialMVPCandidates == 0) ? 1 : 0;
cBestMv = pcAMVPInfo->m_acMvCand[(pcAMVPInfo->numSpatialMVPCandidates == 0) ? 1 : 0];
minMVPCand = (pcAMVPInfo->numSpatialMVPCandidates == 0) ? 1 : 0;
maxMVPCand = (pcAMVPInfo->numSpatialMVPCandidates == 0) ? pcAMVPInfo->iN : 1;
}
else
{
iBestIdx = 0;
cBestMv = pcAMVPInfo->m_acMvCand[0];
minMVPCand = 0;
maxMVPCand = pcAMVPInfo->iN;
}
#else
iBestIdx = 0;
cBestMv = pcAMVPInfo->m_acMvCand[0];
minMVPCand = 0;
maxMVPCand = pcAMVPInfo->iN;
#endif
if (pcAMVPInfo->iN <= 1)
{
rcMvPred = cBestMv;
pcCU->setMVPIdxSubParts( iBestIdx, eRefPicList, uiPartAddr, uiPartIdx, pcCU->getDepth(uiPartAddr));
pcCU->setMVPNumSubParts( pcAMVPInfo->iN, eRefPicList, uiPartAddr, uiPartIdx, pcCU->getDepth(uiPartAddr));
if(pcCU->getSlice()->getMvdL1ZeroFlag() && eRefPicList==REF_PIC_LIST_1)
{
(*puiDistBiP) = xGetTemplateCost( pcCU, uiPartAddr, pcOrgYuv, &m_cYuvPredTemp, rcMvPred, 0, AMVP_MAX_NUM_CANDS, eRefPicList, iRefIdx, iRoiWidth, iRoiHeight);
}
return;
}
// 上述步骤(5)
if (bFilled)
{
assert(pcCU->getMVPIdx(eRefPicList,uiPartAddr) >= 0);
rcMvPred = pcAMVPInfo->m_acMvCand[pcCU->getMVPIdx(eRefPicList,uiPartAddr)];
return;
}
m_cYuvPredTemp.clear();
//-- Check Minimum Cost.
// 比较得出最优MV
for ( i = minMVPCand ; i < maxMVPCand; i++)
{
Distortion uiTmpCost;
uiTmpCost = xGetTemplateCost( pcCU, uiPartAddr, pcOrgYuv, &m_cYuvPredTemp, pcAMVPInfo->m_acMvCand[i], i, AMVP_MAX_NUM_CANDS, eRefPicList, iRefIdx, iRoiWidth, iRoiHeight);
if ( uiBestCost > uiTmpCost )
{
uiBestCost = uiTmpCost;
cBestMv = pcAMVPInfo->m_acMvCand[i];
iBestIdx = i;
(*puiDistBiP) = uiTmpCost;
}
}
m_cYuvPredTemp.clear();
// Setting Best MVP
// 设置最优MVP的信息,将获取的最优MVP信息返回给preInterSearch
rcMvPred = cBestMv;
pcCU->setMVPIdxSubParts( iBestIdx, eRefPicList, uiPartAddr, uiPartIdx, pcCU->getDepth(uiPartAddr));
pcCU->setMVPNumSubParts( pcAMVPInfo->iN, eRefPicList, uiPartAddr, uiPartIdx, pcCU->getDepth(uiPartAddr));
return;
}
而在上层函数preInterSearch中,则通过以下语句调用xEstimateMvPredAMVP并获取从其中返回的上述三个值:cBestMv(最优MV)、iBestIdx(最优MV索引)、pcAMVPInfo->iN(AMVP候选列表中有效候选数量)
xEstimateMvPredAMVP( pcCU, pcOrgYuv, iPartIdx, eRefPicList, iRefIdxTemp, cMvPred[iRefList][iRefIdxTemp], false, &biPDistTemp);
aaiMvpIdx[iRefList][iRefIdxTemp] = pcCU->getMVPIdx(eRefPicList, uiPartAddr);
aaiMvpNum[iRefList][iRefIdxTemp] = pcCU->getMVPNum(eRefPicList, uiPartAddr);
通过调用上述语句,实则将上述三个值分别赋给以下三个值,以供后续使用:
//最优MV存入cMvPred[iRefList][iRefIdxTemp]
cMvPred[iRefList][iRefIdxTemp] = cBestMv
// 最优MVP索引存入CU中(执行xEstimateMvPredAMVP的结果),然后赋值给aaiMvpIdx[iRefList][iRefIdxTemp]
aaiMvpIdx[iRefList][iRefIdxTemp] = pcCU->m_apiMVPIdx[eRefPicList][uiPartAddr]
// MVP候选数量存入CU中(执行xEstimateMvPredAMVP的结果),然后赋值给aaiMvpNum[iRefList][iRefIdxTemp]
aaiMvpNum[iRefList][iRefIdxTemp] = pcCU->m_apiMVPNum[eRefPicList][uiPartAddr]
AMVPInfo
另需要特别注意的是,在HM中,AMVP候选列表是用一个AMVPInfo类的结构体进行存储和传递的
typedef struct _AMVPInfo
{
// MVP候选列表
TComMv m_acMvCand[ AMVP_MAX_NUM_CANDS ]; ///< array of motion vector predictor candidates
// 候选列表中有效候选数量
Int iN; ///< number of motion vector predictor candidates
#if MCTS_ENC_CHECK
// 候选列表中空域候选数量
UInt numSpatialMVPCandidates;
#endif
} AMVPInfo;
这个存储MVP候选列表信息的结构体,在xEstimateMvPredAMVP中名为pcAMVPInfo,在fillMVPCand中名为pInfo
fillMVPCand
下面学习fillMVPCand函数,该函数用于建立MVP候选列表。
该函数学习可参考博客:
HEVC代码学习30:fillMvpCand函数
由于在视频中经常出现一大片区域(比如同一物体)运动方向一样的情况,因此运动向量MV不论在空域上还是时域上都有着很强的相关性,因此可以用当前PU在空域、时域上相邻的块的MV近似代替当前PU的MV以实现运动矢量预测(MVP)。
AMVP技术及将理论上与当前PU的MV最可能相近的空域相邻块、时域相邻块的若干MV收录进MVP候选列表中,以供之后进行选择。而这个建立MVP候选列表并收录MVP的过程就是在fillMVPCand函数中实现的。
建立顺序如下:
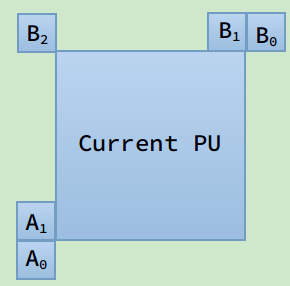
一、建立空域候选列表:
1、按顺序搜索左侧块A0-A1-scaled A0-scaled A1,只要有一个MV存在,写入候选列表,跳出进行下一步。
2、按顺序搜索上方块B0-B1-B2(-scaled B0-scaled B1-scaled B2),只要有一个MV存在,写入候选列表,跳出进行下一步。而其中scaled B0-scaled B1-scaled B2只有当A0和A1的MV都不存在时,才进行搜索。
3、空域候选列表长度为2时,即左侧和上方各选出了一个候选,则对两者进行比较,相同时进行合并。
4、空域候选列表建立完成。
二、当空域候选数量少于2个,且启用时域候选时,建立时域候选列表。
三、如果空域+时域候选个数少于2,则使用(0,0)补足。
fillMVPCand代码如下:
Void TComDataCU::fillMvpCand ( const UInt partIdx, const UInt partAddr, const RefPicList eRefPicList, const Int refIdx, AMVPInfo* pInfo ) const
{
pInfo->iN = 0; // 候选数量先置零
if (refIdx < 0)
{
#if MCTS_ENC_CHECK
pInfo->numSpatialMVPCandidates = 0; // 空域候选数量先置零
#endif
return;
}
//-- Get Spatial MV
// 获取相邻块地址
UInt partIdxLT, partIdxRT, partIdxLB;
deriveLeftRightTopIdx( partIdx, partIdxLT, partIdxRT );
deriveLeftBottomIdx( partIdx, partIdxLB );
Bool isScaledFlagLX = false; /// variable name from specification; true when the PUs below left or left are available (availableA0 || availableA1).
{
UInt idx;
const TComDataCU* tmpCU = getPUBelowLeft(idx, partIdxLB); // 获取左下角CU
isScaledFlagLX = (tmpCU != NULL) && (tmpCU->isInter(idx));
if (!isScaledFlagLX)
{
tmpCU = getPULeft(idx, partIdxLB);
isScaledFlagLX = (tmpCU != NULL) && (tmpCU->isInter(idx));
}
}
// Left predictor search
// 获取左侧块MV
if (isScaledFlagLX)
{
Bool bAdded = xAddMVPCandUnscaled( *pInfo, eRefPicList, refIdx, partIdxLB, MD_BELOW_LEFT); // 获取A0的MV
if (!bAdded)
{
bAdded = xAddMVPCandUnscaled( *pInfo, eRefPicList, refIdx, partIdxLB, MD_LEFT ); // 获取A1的MV
if(!bAdded)
{
bAdded = xAddMVPCandWithScaling( *pInfo, eRefPicList, refIdx, partIdxLB, MD_BELOW_LEFT); // 获取scaled A0的MV
if (!bAdded)
{
xAddMVPCandWithScaling( *pInfo, eRefPicList, refIdx, partIdxLB, MD_LEFT ); // 获取scaled A1的MV
}
}
}
}
// Above predictor search
{
Bool bAdded = xAddMVPCandUnscaled( *pInfo, eRefPicList, refIdx, partIdxRT, MD_ABOVE_RIGHT);
if (!bAdded)
{
bAdded = xAddMVPCandUnscaled( *pInfo, eRefPicList, refIdx, partIdxRT, MD_ABOVE);
if(!bAdded)
{
xAddMVPCandUnscaled( *pInfo, eRefPicList, refIdx, partIdxLT, MD_ABOVE_LEFT);
}
}
}
if(!isScaledFlagLX)
{
Bool bAdded = xAddMVPCandWithScaling( *pInfo, eRefPicList, refIdx, partIdxRT, MD_ABOVE_RIGHT);
if (!bAdded)
{
bAdded = xAddMVPCandWithScaling( *pInfo, eRefPicList, refIdx, partIdxRT, MD_ABOVE);
if(!bAdded)
{
xAddMVPCandWithScaling( *pInfo, eRefPicList, refIdx, partIdxLT, MD_ABOVE_LEFT);
}
}
}
if ( pInfo->iN == 2 )
{
if ( pInfo->m_acMvCand[ 0 ] == pInfo->m_acMvCand[ 1 ] )
{
pInfo->iN = 1;
}
}
#if MCTS_ENC_CHECK
pInfo->numSpatialMVPCandidates = pInfo->iN;
#endif
// 获取时域MVP
if (pInfo->iN < AMVP_MAX_NUM_CANDS && getSlice()->getEnableTMVPFlag() )
{
// Get Temporal Motion Predictor
const UInt numPartInCtuWidth = m_pcPic->getNumPartInCtuWidth();
const UInt numPartInCtuHeight = m_pcPic->getNumPartInCtuHeight();
const Int refIdx_Col = refIdx;
TComMv cColMv;
UInt partIdxRB;
UInt absPartIdx;
deriveRightBottomIdx( partIdx, partIdxRB );
UInt absPartAddr = m_absZIdxInCtu + partAddr;
//---- co-located RightBottom Temporal Predictor (H) ---//
absPartIdx = g_auiZscanToRaster[partIdxRB];
Int ctuRsAddr = -1;
if ( ( ( m_pcPic->getCtu(m_ctuRsAddr)->getCUPelX() + g_auiRasterToPelX[absPartIdx] + m_pcPic->getMinCUWidth () ) < m_pcSlice->getSPS()->getPicWidthInLumaSamples () ) // image boundary check
&& ( ( m_pcPic->getCtu(m_ctuRsAddr)->getCUPelY() + g_auiRasterToPelY[absPartIdx] + m_pcPic->getMinCUHeight() ) < m_pcSlice->getSPS()->getPicHeightInLumaSamples() ) )
{
if ( ( absPartIdx % numPartInCtuWidth < numPartInCtuWidth - 1 ) && // is not at the last column of CTU
( absPartIdx / numPartInCtuWidth < numPartInCtuHeight - 1 ) ) // is not at the last row of CTU
{
absPartAddr = g_auiRasterToZscan[ absPartIdx + numPartInCtuWidth + 1 ];
ctuRsAddr = getCtuRsAddr();
}
else if ( absPartIdx % numPartInCtuWidth < numPartInCtuWidth - 1 ) // is not at the last column of CTU But is last row of CTU
{
absPartAddr = g_auiRasterToZscan[ (absPartIdx + numPartInCtuWidth + 1) % m_pcPic->getNumPartitionsInCtu() ];
}
else if ( absPartIdx / numPartInCtuWidth < numPartInCtuHeight - 1 ) // is not at the last row of CTU But is last column of CTU
{
absPartAddr = g_auiRasterToZscan[ absPartIdx + 1 ];
ctuRsAddr = getCtuRsAddr() + 1;
}
else //is the right bottom corner of CTU
{
absPartAddr = 0;
}
}
if ( ctuRsAddr >= 0 && xGetColMVP( eRefPicList, ctuRsAddr, absPartAddr, cColMv, refIdx_Col ) )
{
pInfo->m_acMvCand[pInfo->iN++] = cColMv;
}
else
{
UInt uiPartIdxCenter;
xDeriveCenterIdx( partIdx, uiPartIdxCenter );
if (xGetColMVP( eRefPicList, getCtuRsAddr(), uiPartIdxCenter, cColMv, refIdx_Col ))
{
pInfo->m_acMvCand[pInfo->iN++] = cColMv;
}
}
//---- co-located RightBottom Temporal Predictor ---//
}
// 若候选列表不满,补零
while (pInfo->iN < AMVP_MAX_NUM_CANDS)
{
pInfo->m_acMvCand[pInfo->iN].set(0,0);
pInfo->iN++;
}
return ;
}
可见,最终构建的MVP候选列表存入了上述的名为pInfo的AMVPInfo结构体中,并返回给xEstimateMvPredAMVP的pcAMVPInfo。
另外,从相邻块获取MV的函数分别为xAddMVPCandUnscaled以及xAddMVPCandWithScaling。前者为获取A0~B2 MV的函数,后者为获取scaled A0~B2的函数。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









