










项目需要查找指定范围里面是否存在某点的需求
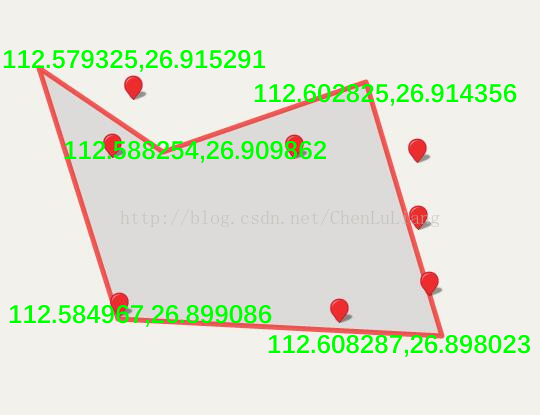
1、首先是几何坐标集
point[] polygon = new point[] {
new point(112.579325, 26.915291),
new point(112.584967,26.899086),
new point(112.608287,26.898023),
new point(112.602825,26.914356),
new point(112.588254,26.909862)
};哎呀 写好了 没什么说的了....
直接贴代码吧
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
namespace WindowsFormsApplication1
{
public partial class Form2 : Form
{
public Form2()
{
InitializeComponent();
}
private void button1_Click(object sender, EventArgs e)
{
double lng=Convert.ToDouble( textBox1.Text);
double lat = Convert.ToDouble(textBox2.Text);
point point = new point(lng, lat);
point ne=new point(0,0),sw = new point(0, 0);
FindAppointDirection(polygon,ref ne, ref sw);//找东北 西南坐标
if (isPointInRect(ne, sw, point)) {
bool fuck = CalculationAlgorithm(polygon, point);
if (fuck) {
label1.Text ="目标点在几何图形中";
}
else {
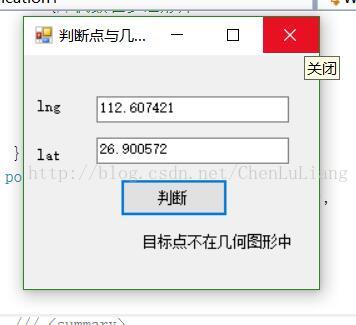
label1.Text = "目标点不在几何图形中";
}
}
}
public bool CalculationAlgorithm(point[] polygon, point p) {
point[] pts = polygon;//获取多边形点
//112.58464,26.909432
int N = pts.Length;
var boundOrVertex = true; //如果点位于多边形的顶点或边上,也算做点在多边形内,直接返回true
var intersectCount = 0;//cross points count of x
var precision = 2e-10; //浮点类型计算时候与0比较时候的容差
point p1, p2;//neighbour bound vertices
p1 = pts[0];//left vertex
for (var i = 1; i <= N; ++i)
{//check all rays
if (p.Equals(p1))
{
return boundOrVertex;//p is an vertex
}
p2 = pts[i % N];//right vertex
if (p.lat < Math.Min(p1.lat, p2.lat) || p.lat > Math.Max(p1.lat, p2.lat))
{//ray is outside of our interests
p1 = p2;
continue;//next ray left point
}
if (p.lat > Math.Min(p1.lat, p2.lat) && p.lat < Math.Max(p1.lat, p2.lat))
{//ray is crossing over by the algorithm (common part of)
if (p.lng <= Math.Max(p1.lng, p2.lng))
{//x is before of ray
if (p1.lat == p2.lat && p.lng >= Math.Min(p1.lng, p2.lng))
{//overlies on a horizontal ray
return boundOrVertex;
}
if (p1.lng == p2.lng)
{//ray is vertical
if (p1.lng == p.lng)
{//overlies on a vertical ray
return boundOrVertex;
}
else
{//before ray
++intersectCount;
}
}
else
{//cross point on the left side
var xinters = (p.lat - p1.lat) * (p2.lng - p1.lng) / (p2.lat - p1.lat) + p1.lng;//cross point of lng
if (Math.Abs(p.lng - xinters) < precision)
{//overlies on a ray
return boundOrVertex;
}
if (p.lng < xinters)
{//before ray
++intersectCount;
}
}
}
}
else
{//special case when ray is crossing through the vertex
if (p.lat == p2.lat && p.lng <= p2.lng)
{//p crossing over p2
var p3 = pts[(i + 1) % N]; //next vertex
if (p.lat >= Math.Min(p1.lat, p3.lat) && p.lat <= Math.Max(p1.lat, p3.lat))
{//p.lat lies between p1.lat & p3.lat
++intersectCount;
}
else
{
intersectCount += 2;
}
}
}
p1 = p2;//next ray left point
}
if (intersectCount % 2 == 0)
{//偶数在多边形外
return false;
}
else
{ //奇数在多边形内
return true;
}
}
point[] polygon = new point[] {
new point(112.579325, 26.915291),
new point(112.584967,26.899086),
new point(112.608287,26.898023),
new point(112.602825,26.914356),
new point(112.588254,26.909862)
};
/// <summary>
/// 判断点是否在矩形内
/// </summary>
/// <param name="ne"></param>
/// <param name="sw"></param>
/// <param name="Tagrtpoint"></param>
/// <returns></returns>
bool isPointInRect(point ne, point sw,point Tagrtpoint) {
//西南脚点 point sw = new point(112.579325, 26.898023);
//东北 point ne = new point(26.915291, 112.608287);
return (Tagrtpoint.lng >= sw.lng && Tagrtpoint.lng <= ne.lng && Tagrtpoint.lat >= sw.lat && Tagrtpoint.lat <= ne.lat);
}
/// <summary>
/// 找东西南北经方向 简单说找东北 西南 坐标做一个矩形判断
/// </summary>
void FindAppointDirection(point[] polygon,ref point ne,ref point sw) {
double[] iArrarylat = new double[polygon.Length];
double[] iArrarylng = new double[polygon.Length];
for (int i=0;i< polygon.Length;i++) {
iArrarylat[i] = polygon[i].lat;
iArrarylng[i] = polygon[i].lng;
}
Array.Sort(iArrarylat);
Array.Sort(iArrarylng);
ne.lat = iArrarylat[polygon.Length - 1];
ne.lng = iArrarylng[polygon.Length - 1];
sw.lat = iArrarylat[0];
sw.lng = iArrarylng[0] ;
}
public class point {
public double lng;
public double lat;
public point(double lng, double lat)
{
this.lat = lat;
this.lng = lng;
}
}
}
}
运行图
源码Demo下载地址:点我跳转















 3130
3130











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











