







smallpt详解 (一)
本文主要是为了记录我学习smallpt的过程。第一部分是关于整个程序的大致分解。第二部分主要说一下我对main函数中cx和cy的理解。第三部分主要说明光线跟踪的每一行代码所用到的数学知识。
1. 基本功能函数
1.1 随机函数
#include <math.h>
#include <stdlib.h>
#include <stdio.h>
#define M_PI 3.1415
double erand48(unsigned short xsubi[3]) {
return (double)rand() / (double)RAND_MAX;
}
erand48()函数是linux下的随机函数,可以取[0, 1]的随机浮点数,在windows下必须自己写一个类似功能的函数。
inline double clamp(double x) { return x < 0 ? 0 : x > 1 ? 1 : x; }
inline int toInt(double x) { return int(pow(clamp(x), 1 / 2.2) * 255 + .5); } //四舍五入这里的难点在于为什么要用pow(clamp(x), 1/ 2.2),查了资料才知道是gamma校正方法,详情可以看
http://blog.csdn.net/candycat1992/article/details/46228771
1.2 Vec类
struct Vec
{
double x, y, z;
Vec(double x_ = 0, double y_ = 0, double z_ = 0) : x(x_), y(y_), z(z_) {}
Vec operator+(const Vec& rhs) const {
return Vec(x + rhs.x, y + rhs.y, z + rhs.z);
}
Vec operator-(const Vec& rhs) const {
return Vec(x - rhs.x, y - rhs.y, z - rhs.z);
}
Vec operator*(double b) const {
return Vec(x * b, y * b, z * b);
}
Vec mult(const Vec &rhs) const {
return Vec(x * rhs.x, y * rhs.y, z * rhs.z);
}
double dot(const Vec &rhs) const { return x*rhs.x + y*rhs.y + z*rhs.z; }
Vec cross(const Vec &rhs) {
return Vec(y * rhs.z - z * rhs.y,
z * rhs.x - x * rhs.z,
x * rhs.y - y * rhs.x);
}
Vec& norm() { return *this = *this * (1 / sqrt(x*x + y*y + z*z)); }
}1) 其中包括向量加减,数乘,标准化,点乘,叉乘,还有需要注意的mult函数,后来会提到。
2) 这个Vec类在之后的计算中既可以表达向量Vector,亦可以表达三维点Point,也用来保存颜色RGB的值。
1.3 Ray类
struct Ray
{
Vec o, d; // o is original point, d is direction of lighting
Ray(Vec o_, Vec d_) : o(o_), d(d_) {}
};射线方程,o是射线的起点,d代表方向
1.4 Sphere类
enum Refl_t { DIFF, SPEC, REFR};
struct Sphere
{
double rad; // radius
Vec position, emission, color;
Refl_t refl;
Sphere(double rad_, Vec p_, Vec e_, Vec c_, Refl_t refl_) :
rad(rad_), position(p_), emission(e_), color(c_), refl(refl_) {}
double intersect(const Ray &r) const { // return distance, 0 if nohit
Vec op = position - r.o;
double t, eps = 1e-4;
double b = op.dot(r.d), det = b*b + rad*rad - op.dot(op);
if (det < 0)
return 0;
else
det = sqrt(det);
return (t = b - det) > eps ? t : ((t = b + det) > eps ? t : 0);
}
};射线和球体/圆,求交原理图:
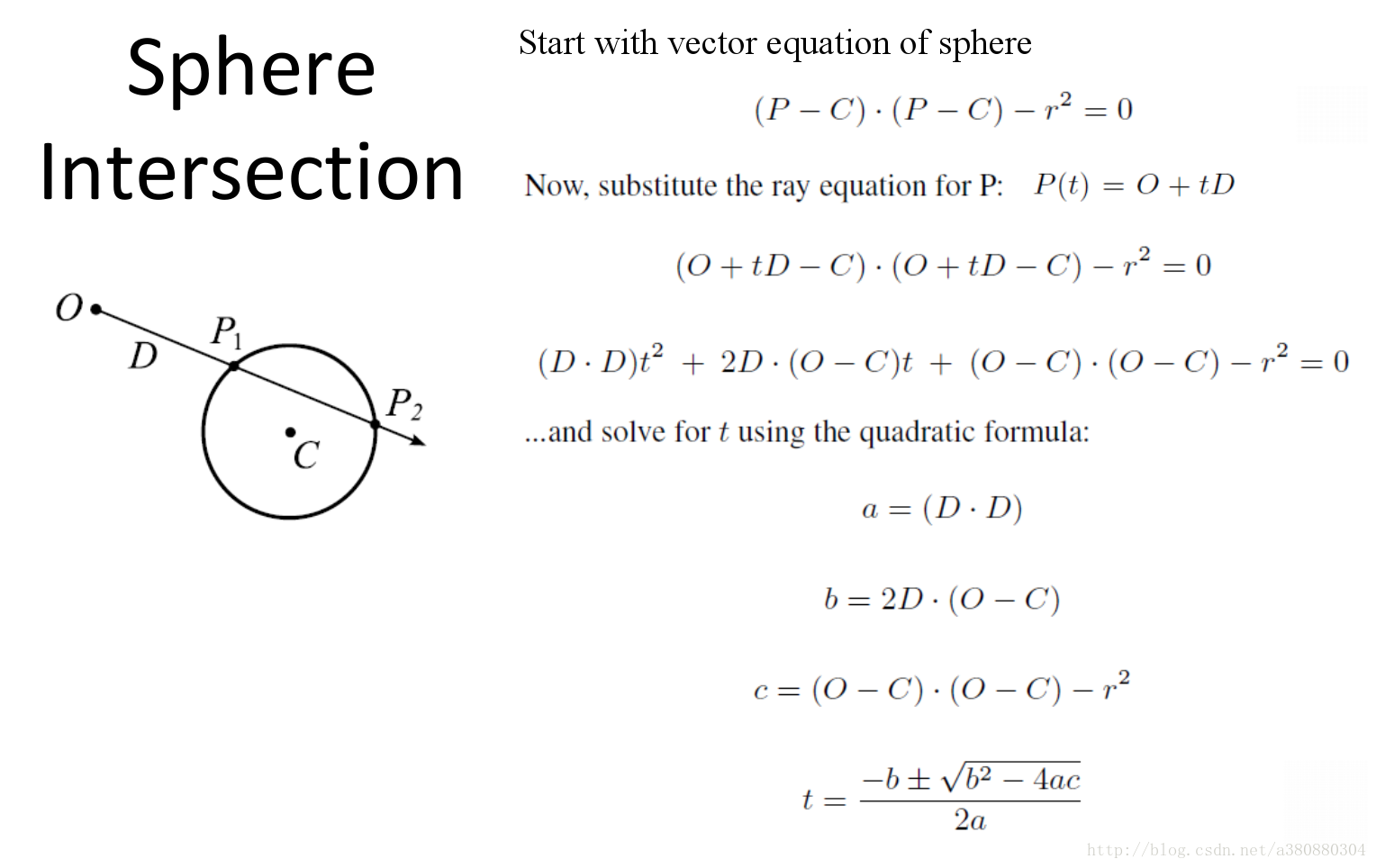
求交的基本原理就是将射线的参数方程代入到圆的函数中,求t的值。
1)将P(t) = O + tD 代入圆方程,会得到 t 的一元二次方程。
2)先求出Vec op,op是用球心p的坐标减去射线的起点,表示原理图中的(O - C)。
3)b = op.dot(r.d)指代 ” D * (O - C) ”
4)求det,这里要注意我们求的b和原理图中的b差了两倍,所以可以直接用
double det = b * b - op.dot(op) + rad * rad;如果det<0说明无解,直接return 0。
否则求根号的det
5)最终的解有一个或两个,可能在 t = b - det,或者t = b + det中,选择t大于0并且两个中较小的t。
2. 绘制过程
2.1 放置球的位置
Sphere spheres[] = {
Sphere(1e5, Vec(1e5 + 1, 40.8, 81.6), Vec(), Vec(.75, .25, .25), Refl_t::DIFF), //left
Sphere(1e5, Vec(-1e5 + 99,40.8,81.6),Vec(),Vec(.25,.25,.75), Refl_t::DIFF),//Rght
Sphere(1e5, Vec(50,40.8, 1e5), Vec(),Vec(.75,.75,.75), Refl_t::DIFF),//Back
Sphere(1e5, Vec(50,40.8,-1e5 + 170), Vec(),Vec(), Refl_t::DIFF),//Frnt
Sphere(1e5, Vec(50, 1e5, 81.6), Vec(),Vec(.75,.75,.75),Refl_t::DIFF),//Botm
Sphere(1e5, Vec(50,-1e5 + 81.6,81.6),Vec(),Vec(.75,.75,.75),Refl_t::DIFF),//Top
Sphere(16.5,Vec(27,16.5,47), Vec(),Vec(1,1,1)*.999, Refl_t::SPEC),//Mirr
Sphere(16.5,Vec(73,16.5,78), Vec(),Vec(1,1,1)*.999, Refl_t::REFR),//Glas
Sphere(600, Vec(50,681.6 - .27,81.6),Vec(12,12,12), Vec(), Refl_t::DIFF) //Lite
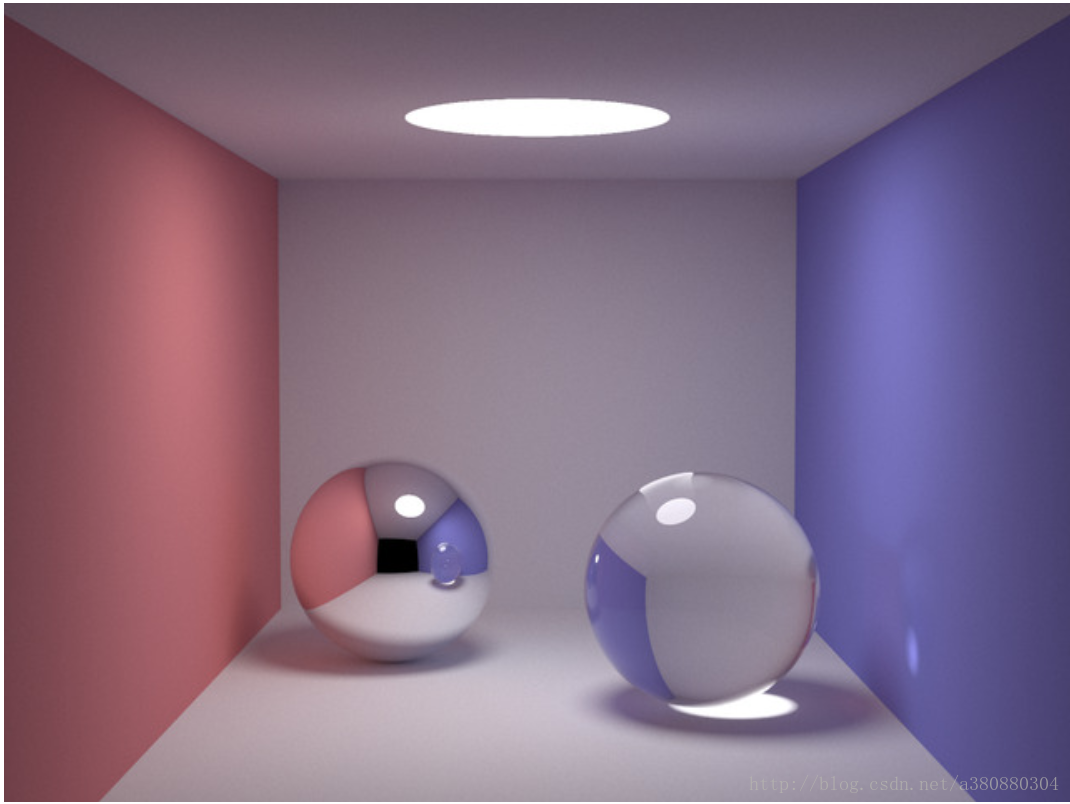
};1)用6个很大的球体当做平面(DIFF属性,只有漫反射),因为半径很大的话,你在近距离看起来,球面就很像一个平面。
作者这样做应该是为了避免去写平面求交,平面类等函数。
2)用1个球表示光源,就是Lite,1个Mirr球(完全反射),1个Glass球(折射和反射都有)
2.2 遍历所有的球,求交点
inline bool intersect(const Ray &r, double &t, int &id) {
double n = sizeof(spheres) / sizeof(Sphere), d, inf = t = 1e20;
for (int i = int(n); i--;) {
if ((d = spheres[i].intersect(r)) && d < t)
{
t = d;
id = i;
}
}
return t < inf;
}此光线射出去,在所有的球体中求交点。
求出距离camera最近的交点,这就是待会要绘制在屏幕上的主要的点。
2.3 main函数
1)camera的位置是在(50, 52, 295.6), 往z轴的负方向看。
int main(int argc, char *argv[])
{
int w = 1024, h = 768, samps = argc == 2 ? atoi(argv[1]) / 4 : 10; // # samples
Ray cam(Vec(50, 52, 295.6), Vec(0, -0.042612, -1).norm()); // cam pos, dir
Vec cx = Vec(w*.5135 / h), cy = (cx.cross(cam.d)).norm()*.5135, r, *c = new Vec[w*h];2)遍历每个像素点,用随机采样的方式求得要射出的光线的方向d。
for (int y = 0; y<h; y++) { // Loop over image rows
fprintf(stderr, "\rRendering (%d spp) %5.2f%%", samps * 4, 100.*y / (h - 1));
for (unsigned short x = 0, Xi[3] = { 0,0,y*y*y }; x<w; x++) // Loop cols
for (int sy = 0, i = (h - y - 1)*w + x; sy<2; sy++) // 2x2 subpixel rows
for (int sx = 0; sx<2; sx++, r = Vec()) { // 2x2 subpixel cols
for (int s = 0; s<samps; s++) {
double r1 = 2 * erand48(Xi), dx = r1<1 ? sqrt(r1) - 1 : 1 - sqrt(2 - r1);
double r2 = 2 * erand48(Xi), dy = r2<1 ? sqrt(r2) - 1 : 1 - sqrt(2 - r2);
Vec d = cx*(((sx + .5 + dx) / 2 + x) / w - .5) +
cy*(((sy + .5 + dy) / 2 + y) / h - .5) + cam.d;
r = r + radiance(Ray(cam.o + d * 140, d.norm()), 0, Xi)*(1. / samps);
} // Camera rays are pushed ^^^^^ forward to start in interior
c[i] = c[i] + Vec(clamp(r.x), clamp(r.y), clamp(r.z))*.25;
}
}
FILE *f = fopen("image.ppm", "w"); // Write image to PPM file.
fprintf(f, "P3\n%d %d\n%d\n", w, h, 255);
for (int i = 0; i<w*h; i++)
fprintf(f, "%d %d %d ", toInt(c[i].x), toInt(c[i].y), toInt(c[i].z));2.4光线跟踪递归函数
radiance函数在第二部分介绍。
以下是大致的分块。
1)判断是否相交,求交点,求表面法向
Vec radiance(const Ray &r, int depth, unsigned short *Xi) {
double t; // distance to intersection
int id = 0; // id of intersected object
if (!intersect(r, t, id))
return Vec(); // if miss, return black
const Sphere &obj = spheres[id]; // the hit object
Vec x = r.o + r.d*t, n = (x - obj.position).norm(); // calculate vector n,球面法向量
Vec nl = n.dot(r.d) < 0 ? n : n*-1, f = obj.color;
double p = f.x>f.y && f.x>f.z ? f.x : f.y>f.z ? f.y : f.z; // max refl
if (++depth>5||!p)
if (erand48(Xi)<p)
f = f*(1 / p);
else
return obj.emission; 2)漫反射(DIFF)
如果材质是漫反射,那么就随机生成一个方向进行漫反射。
if (obj.refl == DIFF) { // Ideal DIFFUSE reflection
double r1 = 2 * M_PI*erand48(Xi), r2 = erand48(Xi), r2s = sqrt(r2);
Vec w = nl, u = ((fabs(w.x)>.1 ? Vec(0, 1) : Vec(1)).cross(w)).norm(), v = w.cross(u); //w,v,u为正交基
Vec d = (u*cos(r1)*r2s + v*sin(r1)*r2s + w*sqrt(1 - r2)).norm();
return obj.emission + f.mult(radiance(Ray(x, d), depth, Xi));
}3)镜面反射(材质为SPEC)
计算镜面反射的方向,然后继续递归
else if (obj.refl == SPEC) // Ideal SPECULAR reflection
return obj.emission + f.mult(radiance(Ray(x, r.d - n * 2 * n.dot(r.d)), depth, Xi));4)反射和折射(材质为REFR)
玻璃材质,有一部分光进行反射,有一部分光进行折射。
这里用到了轮盘赌方法。
Ray reflRay(x, r.d - n * 2 * n.dot(r.d)); // Ideal dielectric REFRACTION 由平行四边形的方法求得反射光的direction
bool into = n.dot(nl)>0; // Ray from outside going in?
double nc = 1, nt = 1.5, nnt = into ? nc / nt : nt / nc, ddn = r.d.dot(nl), cos2t;
if ((cos2t = 1 - nnt*nnt*(1 - ddn*ddn))<0) // Total internal reflection
return obj.emission + f.mult(radiance(reflRay, depth, Xi));
Vec tdir = (r.d*nnt - n*((into ? 1 : -1)*(ddn*nnt + sqrt(cos2t)))).norm();
double a = nt - nc, b = nt + nc, R0 = a*a / (b*b), c = 1 - (into ? -ddn : tdir.dot(n));
double Re = R0 + (1 - R0)*c*c*c*c*c, Tr = 1 - Re, P = .25 + .5*Re, RP = Re / P, TP = Tr / (1 - P);
return obj.emission + f.mult(depth>2 ? (erand48(Xi)<P ? // Russian roulette
radiance(reflRay, depth, Xi)*RP : radiance(Ray(x, tdir), depth, Xi)*TP) :
radiance(reflRay, depth, Xi)*Re + radiance(Ray(x, tdir), depth, Xi)*Tr);参考链接:
[1]https://drive.google.com/file/d/0B8g97JkuSSBwUENiWTJXeGtTOHFmSm51UC01YWtCZw/view














 976
976











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









