




 本文详细介绍了一种朴素模型的网络编程实现方法,包括模型的发展过程、关键代码实现、性能测试及结果分析。
本文详细介绍了一种朴素模型的网络编程实现方法,包括模型的发展过程、关键代码实现、性能测试及结果分析。
做Linux网络开发,一般绕不开标题中几种网络编程模型。网上已有很多写的不错的分析文章,它们的基本论点是差不多的。但是我觉得他们讲的还不够详细,在一些关键论点上缺乏数据支持。所以我决定好好研究这几个模型。(转载请指明出于breaksoftware的csdn博客)
在研究这些模型前,我决定按如下步骤去做:
- 实现朴素模型
- 实现发请求的测试程序
- 实现Select模型,测试其效率
- 实现Poll模型,测试其效率
- 实现Epoll模型,测试其效率
- 分析各模型性能,分析和对比其源码
- 针对各模型特点,修改上述程序进行测试和分析
朴素模型是我们编程时可以使用的最简单的一种模型。因为没有一个确切的名字可以称呼,我索性叫它朴素模型。我选择先实现它,一是为了由易而难,二是为了遵循模型发展的过程、体会技术发展的历程。在实现完朴素模型之后,我们要去实现一个用于发送请求的测试程序,它将帮助我们发送大量的请求,以便于之后我们对各个模型进行可用性测试。之后我们再去实现Select、Poll和Epoll网络模型。这个顺序也是技术发展的顺序,我们可以在实现前一个模型时分析其优缺点,然后在后一个模型分析中,看到其对这些缺点的改进方案,体会技术进步的过程。
为了便于之后各个模型的对比,我会尽可能的重用代码,即各个模型功能相同的模块将使用相同的函数去实现,如果实在不可以重用,则使用参数进行区分,但是区分的代码片段将足够的小。所以,我们将在本文看到大部分重要的代码实现片段。
为了比较直观的观察各个模型的执行,我们将在各个模型执行前,启动一个打印统计信息的线程
err = init_print_thread();
if (err < 0) {
perror("create print thread error");
exit(EXIT_FAILURE);
}init_print_thread函数将被各个模型使用,wait_print_thread是用于等待该打印结果的线程退出。由于我并不准备让这个线程退出,所以wait_print_thread往往用来阻塞主线程。
pthread_t g_print_thread;
int
init_print_thread() {
return pthread_create(&g_print_thread, NULL, print_count, NULL);
}
void
wait_print_thread() {
pthread_join(g_print_thread, NULL);
}print_count函数是用于线程执行的实体,它每隔一秒钟打印一条记录
static int g_request_count = 0;
static int g_server_suc = 0;
static int g_client_suc = 0;
static int g_read_suc = 0;
static int g_write_suc = 0;
static int g_server_fai = 0;
static int g_client_fai = 0;
static int g_read_fai = 0;
static int g_write_fai = 0;
void* print_count(void* arg) {
struct timeval cur_time;
int index = 0;
fprintf(stderr, "index\tseconds_micro_seconds\tac\tst\tsr\tsw\tft\tfr\tfw\n");
while (1) {
sleep(1);
gettimeofday(&cur_time, NULL);
fprintf(stderr, "%d\t%ld\t%d\t%d\t%d\t%d\t%d\t%d\t%d\n",
index,
cur_time.tv_sec * 1000000 + cur_time.tv_usec,
g_request_count,
g_server_suc > g_client_suc ? g_server_suc : g_client_suc,
g_read_suc,
g_write_suc,
g_server_fai > g_client_fai ? g_server_fai : g_client_fai,
g_read_fai,
g_write_fai);
index++;
}
}上述各数据的定义如下:
- g_request_count用于记录总请求数;
- g_server_suc是用于记录服务行为成功数,其场景为:读取客户端成功且发送回包成功
- g_server_fai是记录服务其行为失败数,其场景为:1 读取客户端失败;2 读取客户端成功但是发送回包失败;
- g_client_suc用于记录客户端行为成功数,其场景为:发送包成功且读取服务器回包成功;
- g_client_fai用于记录客户端行为失败数,其场景为:1 发送包失败; 2 发送包成功但是接收服务器回包失败;
- g_read_suc用于记录读取行为成功数,其场景为: 1 服务器读取客户端请求包成功; 2 客户端读取服务器回包成功;
- g_read_fai用于记录读取行为失败数,其场景为: 1 服务器读取客户端请求包失败; 2 客户端读取服务器回包失败;
- g_write_suc用于记录发送行为成功数,其场景为: 1 客户端向服务器发送请求包成功; 2 服务器向客户端回包成功;
- g_write_fai用于记录发送行为失败数,其场景为: 1 客户端向服务器发送请求包失败; 2 服务器向客户端回包失败;
通过数据的打印,我们将知道服务器和客户端执行执行的过程,以及出问题的环节,还有服务器的丢包情况。
下一步,我们需要创建一个供客户端连接的Socket。
listen_sock = make_socket(0);我们对make_socket传入了参数0,是因为我们不要求创建的监听Socket具有异步属性。
int
make_socket(int asyn) {
int listen_sock = -1;
int rc = -1;
int on = 1;
struct sockaddr_in name;
listen_sock = socket(AF_INET, SOCK_STREAM, 0);
if (listen_sock < 0) {
perror("create socket error");
exit(EXIT_FAILURE);
}
rc = setsockopt(listen_sock, SOL_SOCKET, SO_REUSEADDR, (char*)&on, sizeof(on));
if (rc < 0) {
perror("setsockopt error");
exit(EXIT_FAILURE);
}
if (asyn) {
rc = ioctl(listen_sock, FIONBIO, (char*)&on);
if (rc < 0) {
perror("ioctl failed");
exit(EXIT_FAILURE);
}
}
name.sin_family = AF_INET;
name.sin_port = htons(PORT);
name.sin_addr.s_addr = htonl(INADDR_ANY);
if (bind(listen_sock, (struct sockaddr*)&name, sizeof(name)) < 0) {
perror("bind error");
exit(EXIT_FAILURE);
}
return listen_sock;
}这个函数中我们使用了socket函数创建了一个TCP的Socket。并使用bind函数将该socket绑定到本机特定的端口上。
在朴素模型中,我们让服务器是一个同步处理过程。于是不要求之后的连接具有异步属性,所以我们创建该Socket时传了参数0——让监听Socket不具有异步特性。在之后介绍的Select、Poll和Epoll模型中,我们需要客户端接入的连接是异步的,于是我们就传递了参数1,让监听Socket具有异步特性,这样通过它接入的连接也是异步的。
Socket绑定之后,服务器就要开始监听客户端的接入
if (listen(listen_sock, SOMAXCONN) < 0) {
perror("listen error");
exit(EXIT_FAILURE);
}SOMAXCONN是可以同时处理的最大连接数,它是一个系统宏。在我系统上它的值是128。
最后,我们在一个死循环中接收并处理客户端的请求
while (1) {
int new_sock;
new_sock = accept(listen_sock, NULL, NULL);
if (new_sock < 0) {
perror("accept error");
exit(EXIT_FAILURE);
}通过accept我们将获得接入的socket。如果socket值合法,我们则需要让接受的请求数自增1
request_add(1);request_add函数将在之后不同模型以及测试程序中被调用,而且会是在不同的线程中调用。于是这儿就引入一个多线程的问题。我并不打算使用锁等方法,而是利用简单的原子操作来实现。
void
request_add(int count) {
__sync_fetch_and_add(&g_request_count, count);
}由于我们设计的朴素模式是一个同步过程,所以接入的socket不是异步的。当一些特殊情况发生时,之后的读取socket内容的行为或者往socket中写入内容的行为可能会卡住。这样将导致整个服务都卡住,这是我们不希望看到的。于是我们需要对该同步socket设置操作超时属性。
set_block_filedes_timeout(new_sock);void
set_block_filedes_timeout(int filedes) {
struct timeval tv_out, tv_in;
tv_in.tv_sec = READ_TIMEOUT_S;
tv_in.tv_usec = READ_TIMEOUT_US;
if (setsockopt(filedes, SOL_SOCKET, SO_RCVTIMEO, &tv_in, sizeof(tv_in)) < 0) {
perror("set rcv timeout error");
exit(EXIT_FAILURE);
}
tv_out.tv_sec = WRITE_TIMEOUT_S;
tv_out.tv_usec = WRITE_TIMEOUT_US;
if (setsockopt(filedes, SOL_SOCKET, SO_SNDTIMEO, &tv_out, sizeof(tv_out)) < 0) {
perror("set rcv timeout error");
exit(EXIT_FAILURE);
}
}这儿要说明下,我在网上看过很多人提问说通过上述方法设置超时属性无效。其实是他们犯了一个错误,就是将socket设置为异步属性。如果socket既设置为异步属性,又设置了超时,socket当然是按异步特点去执行的,超时设置也就无效了。
还有一个问题,就是有些同学在自己设计服务器和客户端时发生了“死锁”问题(非严格定义意义上的死锁)。那是因为设计的服务器和客户端都是同步的,而且socket都没有设置超时。这样在客户端调用完write之后进入read时,服务器此时也是read状态,导致了“死锁”。但是这个问题并不是经常发生,因为大部分同学实现read时给了一个很大的缓存,并认为读取的内容一次性可以读完。而没有考虑到一次read操作可能读不完全部数据的情况,比如下面的实现
while (nbytes > 0) {
nbytes = recv(filedes, buffer, sizeof(buffer) - 1, 0);
if (nbytes > 0) {
total_length_recv += nbytes;
}
//buffer[nbytes] = 0;
//fprintf(stderr, "%s", buffer);
}这段服务器read操作考虑到了一次性可能读不完全部数据的问题。但是如果客户端发送完数据后,服务器第一次recv可以把全部数据读取出来了。由于读取的数据大于0,于是再次进入读取操作,这个时候,客户端已经处于读取服务器返回的阶段。由于socket是同步的,且未设置超时,导致服务器一直卡在再次读取的操作中,这样就发生了“死锁”。其实这个过程非常有意思,当我们对一段不健壮的代码进行加固时,往往会掉到另外一个坑里。但是只要我们努力的从坑里跳出来,就会豁然开朗且认识到很多别人忽视的问题。
我们再回到正题,我们设置好socket超时属性后,就开始让服务器读取客户端的输入内容,如果输入内容读取成功,则往客户端回包。最后服务器将该次连接关闭
if (0 == server_read(new_sock)) {
server_write(new_sock);
}
close(new_sock);server_read方法在底层调用了read_data方法,read_data方法是我们整个代码的两个关键行为之一
int
is_nonblock(int fd) {
int flags = fcntl(fd, F_GETFL);
if (flags == -1) {
perror("get fd flags error");
exit(EXIT_FAILURE);
}
return (flags & O_NONBLOCK) ? 1 : 0;
}
int
read_data(int filedes, int from_server) {
char buffer[MAXMSG];
int nbytes;
int total_len_recv;
int wait_count = 0;
int rec_suc = 0;
total_len_recv = 0;
while (1) {
nbytes = recv(filedes, buffer, sizeof(buffer) - 1, 0);
if (nbytes < 0) {
if (is_nonblock(filedes)) {
if (EAGAIN == errno || EWOULDBLOCK == errno || EINTR == errno) {
if (wait_count < WAIT_COUNT_MAX) {
wait_count++;
usleep(wait_count);
continue;
}
}
}
break;
}
if (nbytes == 0) {
//fprintf(stderr, "read end\n");
break;
}
else if (nbytes > 0) {
total_len_recv += nbytes;
//buffer[nbytes] = 0;
//fprintf(stderr, "%s", buffer);
}
if ((from_server && is_server_recv_finish(total_len_recv))
|| (!from_server && is_client_recv_finish(total_len_recv))) {
rec_suc = 1;
break;
}
}read_data行为分为客户端和服务器两个版本实现,其基本逻辑是一样的。我们考虑到读取操作可能一次性读不完,所以我们使用while循环持续尝试读取。如果是一个异步的socket,我们则考虑recv函数返回小于0时各种错误值的场景,并使用渐长等待的方式进行多次尝试。如果是同步的socket,一旦recv返回值小于0,则退出读取操作。total_len_recv函数用于统计一共读取的长度,之后通过这个长度结合是否是服务器还是客户端的标识,判断读取操作是否完成。
当读取操作结束后,我们要统计读取操作的行为及其标识的整个过程的行为。
if (from_server) {
if (rec_suc) {
__sync_fetch_and_add(&g_read_suc, 1);
return 0;
} else {
__sync_fetch_and_add(&g_read_fai, 1);
__sync_fetch_and_add(&g_server_fai, 1);
return -1;
}
} else {
if (rec_suc) {
__sync_fetch_and_add(&g_read_suc, 1);
__sync_fetch_and_add(&g_client_suc, 1);
return 0;
} else {
__sync_fetch_and_add(&g_read_fai, 1);
__sync_fetch_and_add(&g_client_fai, 1);
return -1;
}
}
}如果读取操作成功,则进行发送操作。server_write方法在底层调用了write_data方法
int
write_data(int filedes, int from_server) {
int nbytes;
int total_len_send;
int wait_count = 0;
int index;
int send_suc = 0;
total_len_send = 0;
index = 0;
while (1) {
if (from_server) {
nbytes = send(filedes, get_server_send_ptr(index), get_server_send_len(index), 0);
}
else {
nbytes = send(filedes, get_client_send_ptr(index), get_client_send_len(index), 0);
}
if (nbytes < 0) {
if (is_nonblock(filedes)) {
if (EAGAIN == errno || EWOULDBLOCK == errno || EINTR == errno) {
if (wait_count < WAIT_COUNT_MAX) {
wait_count++;
usleep(wait_count);
continue;
}
}
}
break;
}
else if (nbytes == 0) {
break;
}
else if (nbytes > 0) {
total_len_send += nbytes;
}
if ((from_server && is_server_send_finish(total_len_send))
||(!from_server && is_client_send_finish(total_len_send))){
send_suc = 1;
break;
}
}其实现和read_data思路一致,也考虑到一次性写不完的情况和同步异步socket问题。写入操作完成后再去统计相关行为
if (from_server) {
if (send_suc) {
__sync_fetch_and_add(&g_write_suc, 1);
__sync_fetch_and_add(&g_server_suc, 1);
return 0;
} else {
__sync_fetch_and_add(&g_write_fai, 1);
__sync_fetch_and_add(&g_server_fai, 1);
return -1;
}
} else {
if (send_suc) {
__sync_fetch_and_add(&g_write_suc, 1);
return 0;
} else {
__sync_fetch_and_add(&g_write_fai, 1);
__sync_fetch_and_add(&g_client_fai, 1);
return -1;
}
}
}最后我们讲下测试程序的实现。为了便于测试,我要求测试程序可以接受至少2个参数,第一个参数是用于标识启动多少个线程发送请求;第二个参数用于指定线程中等待多少毫秒发送一次请求;第三个参数是可选的,标识一共发送多少次请求。这样我们可以通过这些参数控制测试程序的行为
#define MAXREQUESTCOUNT 100000
static int g_total = 0;
static int g_max_total = 0;
void* send_data(void* arg) {
int wait_time;
int client_sock;
wait_time = *(int*)arg;
while (__sync_fetch_and_add(&g_total, 1) < g_max_total) {
usleep(wait_time);
client_sock = make_client_socket();
connect_server(client_sock);
request_add(1);
set_block_filedes_timeout(client_sock);
if (0 == client_write(client_sock)) {
client_read(client_sock);
}
close(client_sock);
client_sock = 0;
}
}
int
main(int argc, char* argv[]) {
int thread_count;
int index;
int err;
int wait_time;
pthread_t thread_id;
if (argc < 3) {
fprintf(stderr, "error! example: client 10 50\n");
return 0;
}
err = init_print_thread();
if (err < 0) {
perror("create print thread error");
exit(EXIT_FAILURE);
}
thread_count = atoi(argv[1]);
wait_time = atoi(argv[2]);
g_max_total = MAXREQUESTCOUNT;
if (argc > 3) {
g_max_total = atoi(argv[3]);
}
for (index = 0; index < thread_count; index++) {
err = pthread_create(&thread_id, NULL, send_data, &wait_time);
if (err != 0) {
perror("can't create send thread");
exit(EXIT_FAILURE);
}
}
wait_print_thread();
return 0;
}线程中,首先通过make_client_socket创建socket并绑定到本地端口上
int
make_client_socket() {
int client_sock = -1;
struct sockaddr_in client_addr;
client_sock = socket(AF_INET, SOCK_STREAM, 0);
if (client_sock < 0) {
perror("create socket error");
exit(EXIT_FAILURE);
}
bzero(&client_addr, sizeof(client_addr));
client_addr.sin_family = AF_INET;
client_addr.sin_addr.s_addr = htons(INADDR_ANY);
client_addr.sin_port = htons(0);
if (bind(client_sock, (struct sockaddr*)&client_addr, sizeof(client_addr)) < 0) {
perror("bind error");
exit(EXIT_FAILURE);
}
return client_sock;
}然后通过connect_server连接服务器
void
connect_server(int client_sock) {
struct sockaddr_in server_addr;
bzero(&server_addr, sizeof(server_addr));
server_addr.sin_family = AF_INET;
if (inet_aton("127.0.0.1", &server_addr.sin_addr) == 0) {
perror("set server ip error");
exit(EXIT_FAILURE);
}
server_addr.sin_port = htons(PORT);
if (connect(client_sock, (struct sockaddr*)&server_addr, sizeof(server_addr)) < 0) {
perror("client connect server error");
exit(EXIT_FAILURE);
}
}最后通过client_write和client_read和服务器通信。这两个函数都是调用上面介绍的write_data和read_data,所以没什么好讲的。
int
client_read(int filedes) {
return read_data(filedes, 0);
}
int
client_write(int filedes) {
return write_data(filedes, 0);
}我们启动一千个线程,发送30万次请求。看看朴素模型的处理能力。
首先我们看看服务器的结果打印
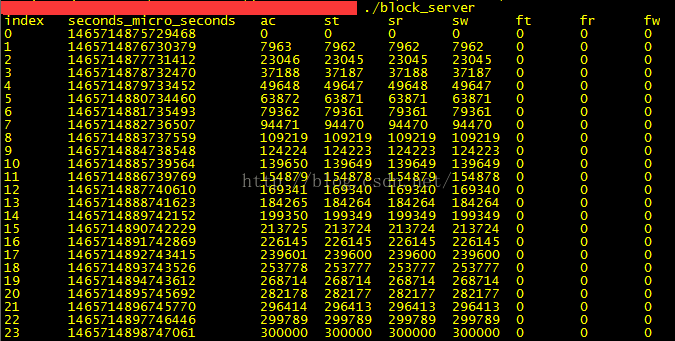
可以发现稳定的处理能力大概在每秒14000~15000左右。
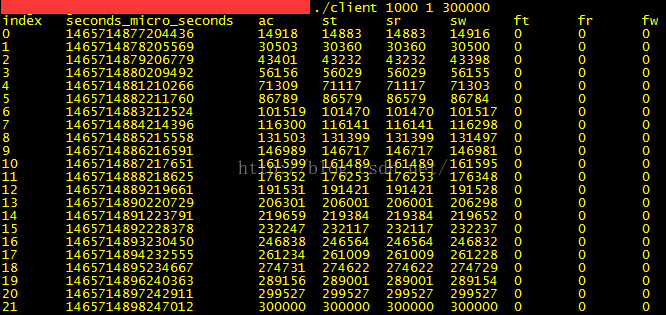
我们再看看客户端的打印
我们发现其发送频率差不多也是14000~16000。这儿要说明下,因为客户端是同步模型,服务器也是同步模型,所以这个速率是服务器处理的峰值。否则按照设置的1微秒的等待时间,1000个线程一秒钟发送的请求数肯定不止15000。我使用过两个测试进程同时去压,也验证了其最大的处理能力也就是在14000~15000左右(在我的配置环境下)。
我们发现,使用朴素模型实现网络通信是非常方便的。但是这个模型有个明显的缺点,就是一次只能处理一个请求——即接收请求、读socket、写socket是串行执行的。除非使用线程池去优化这个流程,否则在单线程的情况下,似乎就不能解决这个问题了。科技总是进步的,我们将在下一节讲解Select模型,它就可以解决这个问题。


















 3653
3653

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











