







来自刘凯STM32视频教程,软件仿真
–参考文件:STM32固件库使用手册的中文翻译版.pdf
如图1
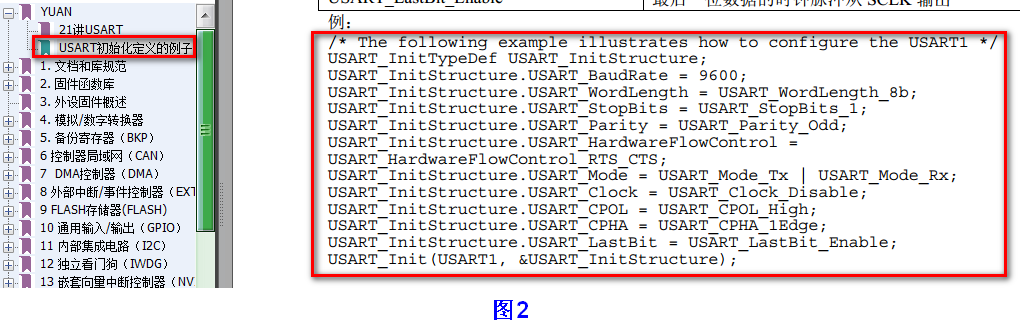
- 我们先把USART初始化函数添加到主函数,如图二
包括Baudrate,Word Length,Stop Bit,Parity,Hardware Flow Control(硬件流控制),Usart Mode;
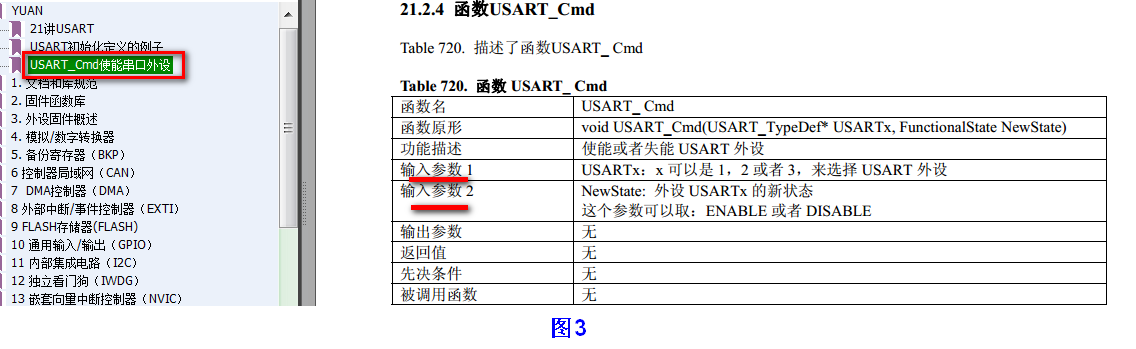
- UE使能,使能串口外设,如图3
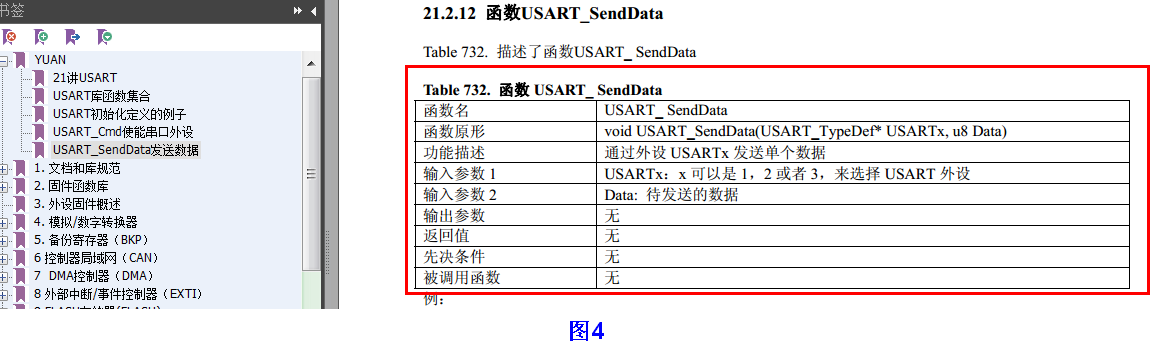
3.串口初始化,串口外设使能之后,就要发送数据了如图4;
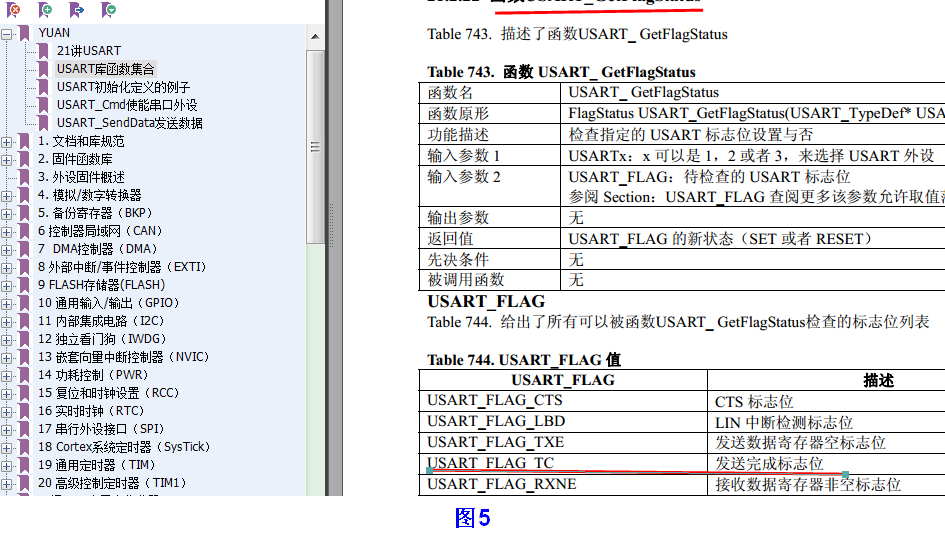
4.发送完成标志位函数,如图5;
程序1 实现功能代码如下
/************************************************
刘凯教你学STM32F103
第20讲
软件仿真,库函数实现USART数据发送
2016年4月24日 10:12:39
程序实现1
**************************************************/
#include "sys.h"
#include "delay.h"
void RCC_Configuration(void);
void GPIO_Configuration(void);
int main(void)
{
u8 i,data;
USART_InitTypeDef USART_InitStructure;
RCC_Configuration();
GPIO_Configuration();
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1,ENABLE);
data = 'A';
for(i=0;i<30;i++)
{
USART_SendData(USART1, data);
data++;
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
}
}
void RCC_Configuration(void)
{
/*---------------使用外部RC晶振----------*/
RCC_DeInit(); //设置时钟为缺省值
RCC_HSEConfig(RCC_HSE_ON); //使能外部高速晶振
while(RCC_GetFlagStatus(RCC_FLAG_HSERDY) == RESET);//等待HSE准备就绪
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable); //使能指令预取
FLASH_SetLatency(FLASH_Latency_2); //等待2个周期
RCC_HCLKConfig(RCC_SYSCLK_Div1); //HCLK = SYSCLK
RCC_PCLK2Config(RCC_HCLK_Div1); //PCLK2 = HCLK
RCC_PCLK1Config(RCC_HCLK_Div2); //PCLK1 = HCLK/2
RCC_PLLConfig(RCC_PLLSource_HSE_Div1,RCC_PLLMul_9); //PLLCLK = 72MHZ
RCC_PLLCmd(ENABLE); //Enable PLLCLK
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET); //Wait PLL is ready
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK); //SYSCLK = PLLCLK
while(RCC_GetSYSCLKSource()!= 0x08); //Wait PLLCLK as system clock
//---------打开相应外设时钟--------------------
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //使能APB2外设的GPIOA的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
}
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //声明一个结构体变量
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //管脚频率为50MHZ
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化GPIOA寄存器
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //选择
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化GPIOA寄存器
} 对上面代码进行优化
/************************************************
刘凯教你学STM32F103
第20讲
软件仿真,库函数实现USART数据发送
2016年4月24日 10:12:39
程序实现2 对程序1进行优化
**************************************************/
#include "sys.h"
#include "delay.h"
void RCC_Configuration(void);
void GPIO_Configuration(void);
void USART_Configuration(u32 Baudrate);
int main(void)
{
u8 i,data;
RCC_Configuration();
GPIO_Configuration();
USART_Configuration(9600);
data = 'A';
for(i=0;i<30;i++)
{
USART_SendData(USART1, data);
data++;
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
}
}
void RCC_Configuration(void)
{
/*---------------使用外部RC晶振----------*/
RCC_DeInit(); //设置时钟为缺省值
RCC_HSEConfig(RCC_HSE_ON); //使能外部高速晶振
while(RCC_GetFlagStatus(RCC_FLAG_HSERDY) == RESET);//等待HSE准备就绪
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable); //使能指令预取
FLASH_SetLatency(FLASH_Latency_2); //等待2个周期
RCC_HCLKConfig(RCC_SYSCLK_Div1); //HCLK = SYSCLK
RCC_PCLK2Config(RCC_HCLK_Div1); //PCLK2 = HCLK
RCC_PCLK1Config(RCC_HCLK_Div2); //PCLK1 = HCLK/2
RCC_PLLConfig(RCC_PLLSource_HSE_Div1,RCC_PLLMul_9); //PLLCLK = 72MHZ
RCC_PLLCmd(ENABLE); //Enable PLLCLK
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET); //Wait PLL is ready
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK); //SYSCLK = PLLCLK
while(RCC_GetSYSCLKSource()!= 0x08); //Wait PLLCLK as system clock
//---------打开相应外设时钟--------------------
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //使能APB2外设的GPIOA的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
}
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //声明一个结构体变量
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //管脚频率为50MHZ
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化GPIOA寄存器
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //选择
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化GPIOA寄存器
}
void USART_Configuration(u32 Baudrate)
{
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = Baudrate;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1,ENABLE);
}














 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









