







 本文概述了外参相机标定的过程,包括从世界坐标系到相机3D坐标系的转换(外参)和从相机坐标系到2D图像平面的投影(内参)。介绍了旋转和平移的6自由度及其表示方法,如欧拉角和 homogeneous coordinate。内容以英文呈现,旨在为SLAM学习打下基础。
本文概述了外参相机标定的过程,包括从世界坐标系到相机3D坐标系的转换(外参)和从相机坐标系到2D图像平面的投影(内参)。介绍了旋转和平移的6自由度及其表示方法,如欧拉角和 homogeneous coordinate。内容以英文呈现,旨在为SLAM学习打下基础。
Extrinsic Camera Calibration
This article offers an overview on extrinsic camera calibration
camera calibration composed of 2 transformations:
1. from some world coordinate system to the camera’s
3D coordinate system.(extrinsic parameters)
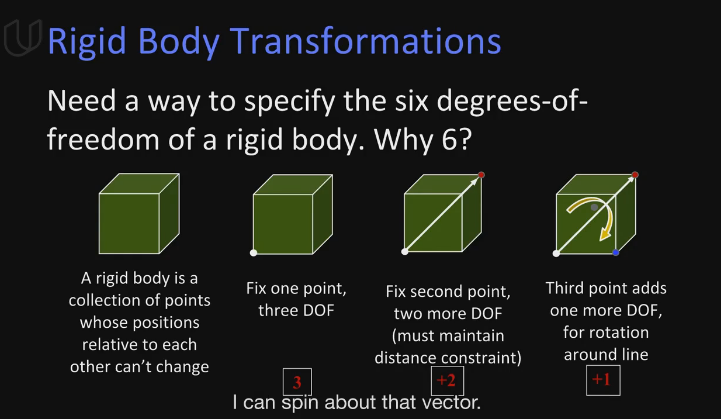
quiz: how many degrees of freedom are there in specifying the extrinsic parameters?
why 6?
2.from the 3D coordinates in the camera frame to the
2D image plane via projection*(intrinsic parameters)*
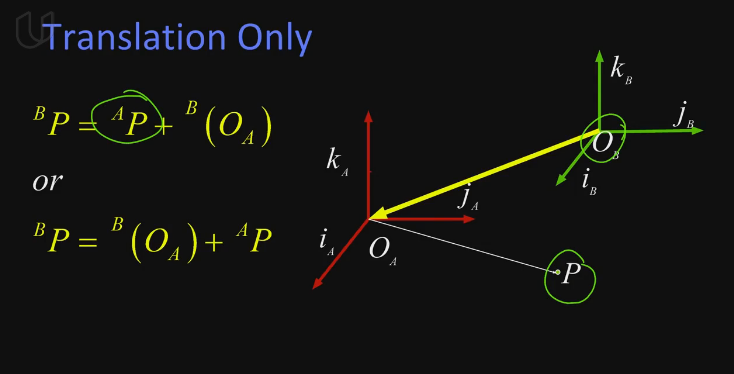
ok, let’s start talking about the notation
-superscript references coordinate frame
[
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1673
1673

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









