









2010-9-14更新
增加了小车按照正方形的边行进
因为有视频,所以把相关东西放到了新浪的博客上,请移步新浪博客,谢谢
http://blog.sina.com.cn/fangyuantdy
2010-9-8更新
增加了10秒钟向前,10秒钟向后的如此往复的代码
2010-9-6更新
小车终于转圈了,看了老大的博文:http://blog.sina.com.cn/s/blog_6b938f630100kha2.html
发现接线还真是错的一塌糊涂,经过改正之后跑起来了,有视频的哦,请参见http://blog.sina.com.cn/u/1661966154
之前写的内容如下:
小车今天早上九点到手的,当时我还在刷牙。。。先来几张照片解馋吧,呵呵

开始组装,其实这个接法是错误的,上盖板就没办法固定了。最后几张照片修正了这个错误
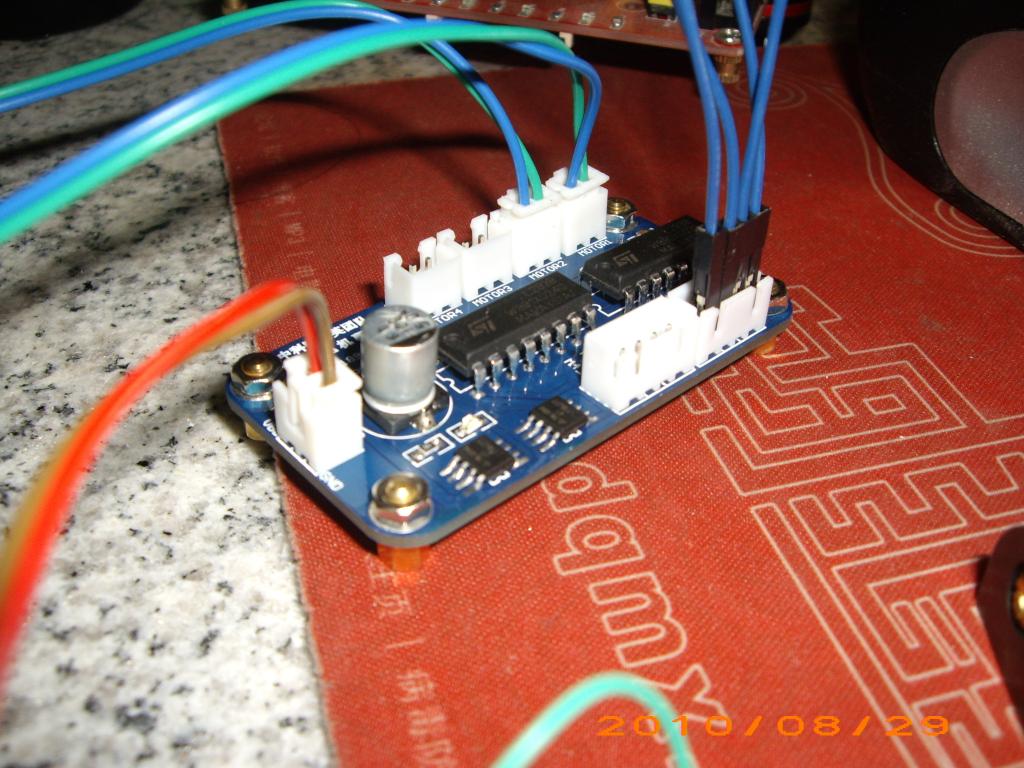
四路直流电机驱动板

各个部件零散状态,未整合

红牛板子上的接线,PWM1,PWM2输出分别是图中左侧的PB0,PB1,然后对应驱动板上的M1_S,M2_S,但是另外两根连线应该是错误的,只要这两根线连上电机就不转了
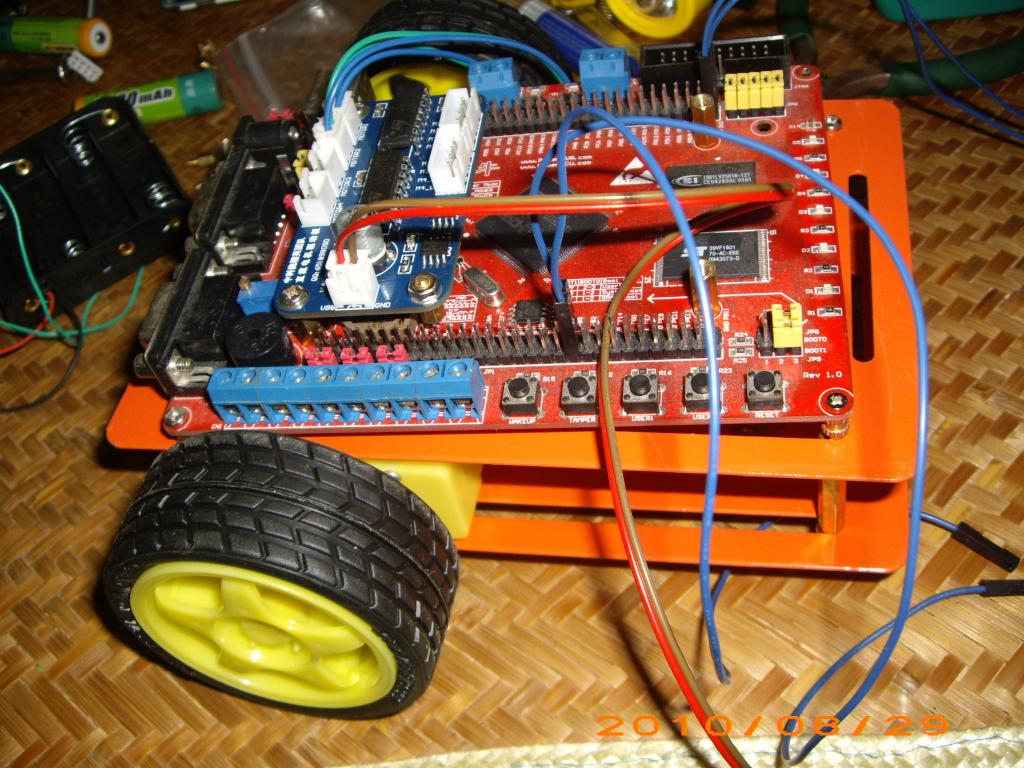
整合好的,红牛板子的LCD被拆了,然后固定在小车顶板上因为孔位置不对,所以斜着放了,两个孔能对齐。
同时注意轮子安装位置,这个是修正过的

整合好的,来个俯视图,有两根线没接。同时注意轮子安装位置,这个是修正过的
好了,来说说目前研究情况,光连接PB0,PB1到M1_S,M2_S之后电机能转,但是发现两个电机转速都一样,M1_D,M2_D连接GND之后电机就不转了(当然那个接GND的有一根接错了,接对的情况下也是不转的),这个得请教下叶帆老大了,估计是接线问题
放上老大的测试代码
我把CH1的占空比改成了10%之后发现转速还是一样的,本来以为差别不大看不出来,放地上一跑发现是走的是直线。。。















 2449
2449

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









