








 超级会员免费看
超级会员免费看

1.介绍:
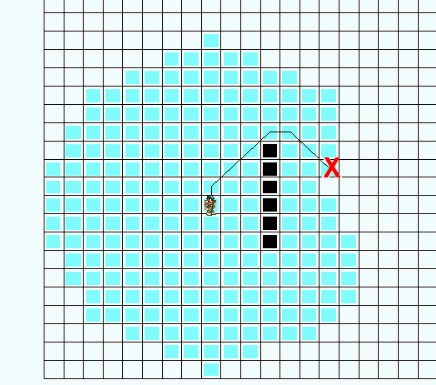
接上一篇《Cocos2d-x 寻路算法之一 距离优先》,看这个图,我们发现这个寻路算法有点傻,明明终点在右侧却每个方向都找。难道没有其他办法了吗?从现实生活中我们知道东西如果在东边,当然是往东边搜索才是最好的办法。
2.开始动手
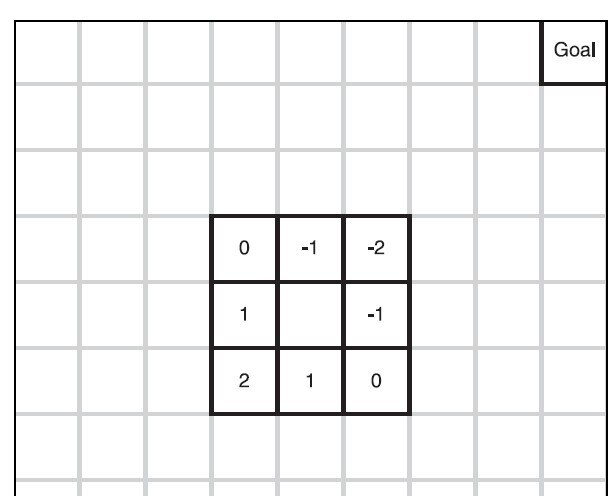
计算机中如何表示离目标近呢?
 本文介绍了Cocos2d-x游戏中实现寻路算法的一种改进方法,即按照离目的地距离优先的原则进行搜索。作者通过代码示例展示了如何计算物理距离并更新比较条件,从而优化路径寻找过程。尽管这种方法存在不考虑权重和可能陷入局部最优的问题,但相较于前一篇算法,已经显著减少了步数。文章末尾提供了项目下载链接以便读者进一步研究。
本文介绍了Cocos2d-x游戏中实现寻路算法的一种改进方法,即按照离目的地距离优先的原则进行搜索。作者通过代码示例展示了如何计算物理距离并更新比较条件,从而优化路径寻找过程。尽管这种方法存在不考虑权重和可能陷入局部最优的问题,但相较于前一篇算法,已经显著减少了步数。文章末尾提供了项目下载链接以便读者进一步研究。
接上一篇《Cocos2d-x 寻路算法之一 距离优先》,看这个图,我们发现这个寻路算法有点傻,明明终点在右侧却每个方向都找。难道没有其他办法了吗?从现实生活中我们知道东西如果在东边,当然是往东边搜索才是最好的办法。
计算机中如何表示离目标近呢?
 731
242
5929
731
242
5929

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文
























