







K-SVD算法的基本思想:

Y为训练样本,D为字典,X为稀疏系数。一般分为Sparse Coding和DictionaryUpdate两个步骤:
1:Sparse Coding:固定字典D通过下面的目标函数采用一种追踪算法找到样本的最佳稀疏矩阵。
2:Dictionary Update:按列更新字典,一句可使MSE减少的准则,通过SVD(奇异值分解)循序的更新每一列和该列对应的稀疏矩阵的值。
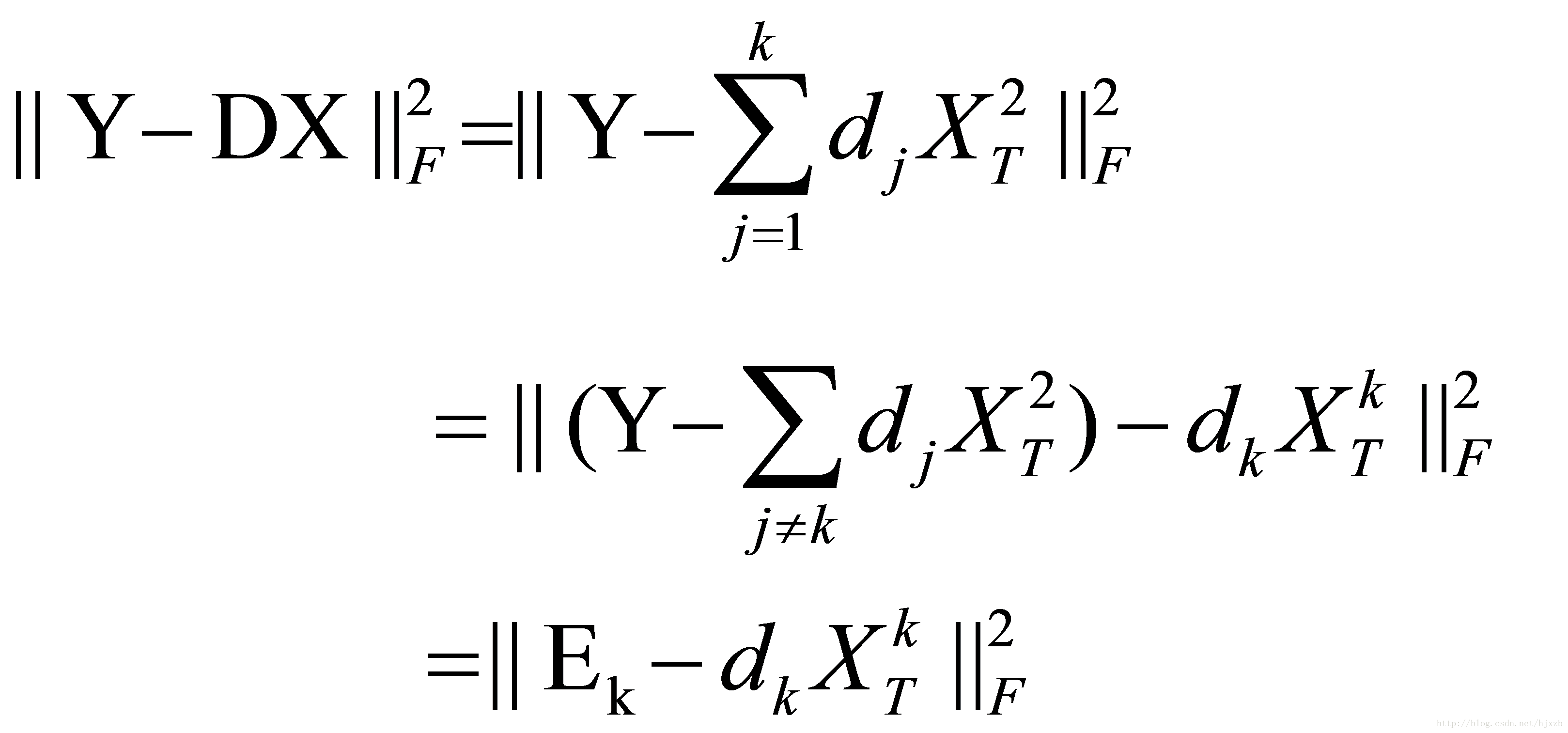
EK为字典的第k列的残差,物理意义:没有dk时表示的误差,也就是字典的第k列在表示Y的过程中究竟起到了多大的作用。
根据上面的EK的解释可以知道,我们的目的就是找到一个合适的dk来最大化减小EK。
为了得到dk就需要对EK 进行SVD(奇异值分解),Ek=UΔVT令矩阵U的第一列作为字典第K列更新后的dk,同时令Δ(1,1)乘以V的第一列作为更新后的稀疏系数。
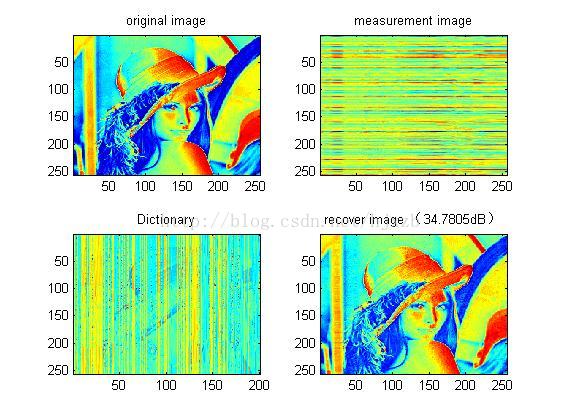
下面是一个简单的利用KSVD和OMP算法的演示代码
代码流程:
Step1:读入的一张lena图片img
Step2: 随机生成一个测量矩阵phi
Step3:y=phi*img得到观测值
Step4:利用[Dictionary,]=KSVD[img,para]得到dictionary
Step5:利用A=OMP[phi*Dictionary,y,L]得到稀疏系数矩阵
Step6:img_rec=Dictionary*A得到重建的图像。
Demo_Code_1.m
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% the K-SVD basis is selected as the sparse representation dictionary
% the OMP algorithm is used to recover the image
% Author: zhang ben, ncuzhangben@qq.com
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%***************************** read in the image **************************
img=imread('lena.bmp'); % read in the image "lena.bmp"
img=double(img);
[N,n]=size(img);
img0 = img; % keep an original copy of the input signal
%****************form the measurement matrix and Dictionary ***************
%form the measurement matrix Phi
Phi=randn(N,n);
Phi = Phi./repmat(sqrt(sum(Phi.^2,1)),[N,1]); % normalize each column
%fix the parameters
param.L =20; % number of elements in each linear combination.
param.K =150; %number of dictionary elements
param.numIteration = 50; % number of iteration to execute the K-SVD algorithm.
param.errorFlag = 0; % decompose signals until a certain error is reached.
%do not use fix number of coefficients.
%param.errorGoal = sigma;
param.preserveDCAtom = 0;
param.InitializationMethod ='DataElements';%initialization by the signals themselves
param.displayProgress = 1; % progress information is displyed.
[Dictionary,output]= KSVD(img,param);%Dictionary is N*param.K
%************************ projection **************************************
y=Phi*img; % treat each column as a independent signal
y0=y; % keep an original copy of the measurements
%********************* recover using OMP *********************************
D=Phi*Dictionary;
A=OMP(D,y,20);
imgr=Dictionary*A;
%*********************** show the results ********************************
figure(1)
subplot(2,2,1),imagesc(img0),title('original image')
subplot(2,2,2),imagesc(y0),title('measurement image')
subplot(2,2,3),imagesc(Dictionary),title('Dictionary')
psnr=20*log10(255/sqrt(mean((img(:)-imgr(:)).^2)));
subplot(2,2,4),imagesc(imgr),title(strcat('recover image (',num2str(psnr),'dB)'))
disp('over')OMP.m(这是网友写好的代码)
function [A]=OMP(D,X,L);
%=============================================
% Sparse coding of a group of signals based on a given
% dictionary and specified number of atoms to use.
% input arguments:
% D - the dictionary (its columns MUST be normalized).
% X - the signals to represent
% L - the max. number of coefficients for each signal.
% output arguments:
% A - sparse coefficient matrix.
%=============================================
[n,K]=size(D);
[n,P]=size(X);
for k=1:1:P,
a=[];
x=X(:,k);%令向量x等于矩阵X的第K列的元素长度为n*1
residual=x;%n*1
indx=zeros(L,1);%L*1的0矩阵
for j=1:1:L,
proj=D'*residual;%K*n n*1 变成K*1
[maxVal,pos]=max(abs(proj));% 最大投影系数对应的位置
pos=pos(1);
indx(j)=pos;
a=pinv(D(:,indx(1:j)))*x;
residual=x-D(:,indx(1:j))*a;
if sum(residual.^2) < 1e-6
break;
end
end;
temp=zeros(K,1);
temp(indx(1:j))=a;
A(:,k)=sparse(temp);%A为返回为K*P的矩阵
end;
return;KSVD算法实现代码:
function [Dictionary,output] = KSVD(...
Data,... % an nXN matrix that contins N signals (Y), each of dimension n.
param)
% =========================================================================
% K-SVD algorithm
% =========================================================================
% The K-SVD algorithm finds a dictionary for linear representation of
% signals. Given a set of signals, it searches for the best dictionary that
% can sparsely represent each signal. Detailed discussion on the algorithm
% and possible applications can be found in "The K-SVD: An Algorithm for
% Designing of Overcomplete Dictionaries for Sparse Representation", written
% by M. Aharon, M. Elad, and A.M. Bruckstein and appeared in the IEEE Trans.
% On Signal Processing, Vol. 54, no. 11, pp. 4311-4322, November 2006.
% =========================================================================
% INPUT ARGUMENTS:
% Data an nXN matrix that contins N signals (Y), each of dimension n.
% param structure that includes all required
% parameters for the K-SVD execution.
% Required fields are:
% K, ... the number of dictionary elements to train
% numIteration,... number of iterations to perform.
% errorFlag... if =0, a fix number of coefficients is
% used for representation of each signal. If so, param.L must be
% specified as the number of representing atom. if =1, arbitrary number
% of atoms represent each signal, until a specific representation error
% is reached. If so, param.errorGoal must be specified as the allowed
% error.
% preserveDCAtom... if =1 then the first atom in the dictionary
% is set to be constant, and does not ever change. This
% might be useful for working with natural
% images (in this case, only param.K-1
% atoms are trained).
% (optional, see errorFlag) L,... % maximum coefficients to use in OMP coefficient calculations.
% (optional, see errorFlag) errorGoal, ... % allowed representation error in representing each signal.
% InitializationMethod,... mehtod to initialize the dictionary, can
% be one of the following arguments:
% * 'DataElements' (initialization by the signals themselves), or:
% * 'GivenMatrix' (initialization by a given matrix param.initialDictionary).
% (optional, see InitializationMethod) initialDictionary,... % if the initialization method
% is 'GivenMatrix', this is the matrix that will be used.
% (optional) TrueDictionary, ... % if specified, in each
% iteration the difference between this dictionary and the trained one
% is measured and displayed.
% displayProgress, ... if =1 progress information is displyed. If param.errorFlag==0,
% the average repersentation error (RMSE) is displayed, while if
% param.errorFlag==1, the average number of required coefficients for
% representation of each signal is displayed.
% =========================================================================
% OUTPUT ARGUMENTS:
% Dictionary The extracted dictionary of size nX(param.K).
% output Struct that contains information about the current run. It may include the following fields:
% CoefMatrix The final coefficients matrix (it should hold that Data equals approximately Dictionary*output.CoefMatrix.
% ratio If the true dictionary was defined (in
% synthetic experiments), this parameter holds a vector of length
% param.numIteration that includes the detection ratios in each
% iteration).
% totalerr The total representation error after each
% iteration (defined only if
% param.displayProgress=1 and
% param.errorFlag = 0)
% numCoef A vector of length param.numIteration that
% include the average number of coefficients required for representation
% of each signal (in each iteration) (defined only if
% param.displayProgress=1 and
% param.errorFlag = 1)
% =========================================================================
if (~isfield(param,'displayProgress'))
param.displayProgress = 0;
end
totalerr(1) = 99999;
if (isfield(param,'errorFlag')==0)
param.errorFlag = 0;
end
if (isfield(param,'TrueDictionary'))
displayErrorWithTrueDictionary = 1;
ErrorBetweenDictionaries = zeros(param.numIteration+1,1); %产生零矩阵
ratio = zeros(param.numIteration+1,1);
else
displayErrorWithTrueDictionary = 0;
ratio = 0;
end
if (param.preserveDCAtom>0)
FixedDictionaryElement(1:size(Data,1),1) = 1/sqrt(size(Data,1));
else
FixedDictionaryElement = [];
end
% coefficient calculation method is OMP with fixed number of coefficients
if (size(Data,2) < param.K)
disp('Size of data is smaller than the dictionary size. Trivial solution...');
Dictionary = Data(:,1:size(Data,2));
return;
elseif (strcmp(param.InitializationMethod,'DataElements'))
Dictionary(:,1:param.K-param.preserveDCAtom) = Data(:,1:param.K-param.preserveDCAtom);
elseif (strcmp(param.InitializationMethod,'GivenMatrix'))
Dictionary(:,1:param.K-param.preserveDCAtom) = param.initialDictionary(:,1:param.K-param.preserveDCAtom);
end
% reduce the components in Dictionary that are spanned by the fixed
% elements
if (param.preserveDCAtom)
tmpMat = FixedDictionaryElement \ Dictionary;
Dictionary = Dictionary - FixedDictionaryElement*tmpMat;
end
%normalize the dictionary.
Dictionary = Dictionary*diag(1./sqrt(sum(Dictionary.*Dictionary)));
Dictionary = Dictionary.*repmat(sign(Dictionary(1,:)),size(Dictionary,1),1); % multiply in the sign of the first element.
totalErr = zeros(1,param.numIteration);
% the K-SVD algorithm starts here.
for iterNum = 1:param.numIteration
% find the coefficients
if (param.errorFlag==0)
%CoefMatrix = mexOMPIterative2(Data, [FixedDictionaryElement,Dictionary],param.L);
CoefMatrix = OMP([FixedDictionaryElement,Dictionary],Data, param.L);
else
%CoefMatrix = mexOMPerrIterative(Data, [FixedDictionaryElement,Dictionary],param.errorGoal);
CoefMatrix = OMPerr([FixedDictionaryElement,Dictionary],Data, param.errorGoal);
param.L = 1;
end
replacedVectorCounter = 0;
rPerm = randperm(size(Dictionary,2));
for j = rPerm
[betterDictionaryElement,CoefMatrix,addedNewVector] = I_findBetterDictionaryElement(Data,...
[FixedDictionaryElement,Dictionary],j+size(FixedDictionaryElement,2),...
CoefMatrix ,param.L);
Dictionary(:,j) = betterDictionaryElement;
if (param.preserveDCAtom)
tmpCoef = FixedDictionaryElement\betterDictionaryElement;
Dictionary(:,j) = betterDictionaryElement - FixedDictionaryElement*tmpCoef;
Dictionary(:,j) = Dictionary(:,j)./sqrt(Dictionary(:,j)'*Dictionary(:,j));
end
replacedVectorCounter = replacedVectorCounter+addedNewVector;
end
if (iterNum>1 & param.displayProgress)
if (param.errorFlag==0)
output.totalerr(iterNum-1) = sqrt(sum(sum((Data-[FixedDictionaryElement,Dictionary]*CoefMatrix).^2))/prod(size(Data)));
disp(['Iteration ',num2str(iterNum),' Total error is: ',num2str(output.totalerr(iterNum-1))]);
else
output.numCoef(iterNum-1) = length(find(CoefMatrix))/size(Data,2);
disp(['Iteration ',num2str(iterNum),' Average number of coefficients: ',num2str(output.numCoef(iterNum-1))]);
end
end
if (displayErrorWithTrueDictionary )
[ratio(iterNum+1),ErrorBetweenDictionaries(iterNum+1)] = I_findDistanseBetweenDictionaries(param.TrueDictionary,Dictionary);
disp(strcat(['Iteration ', num2str(iterNum),' ratio of restored elements: ',num2str(ratio(iterNum+1))]));
output.ratio = ratio;
end
Dictionary = I_clearDictionary(Dictionary,CoefMatrix(size(FixedDictionaryElement,2)+1:end,:),Data);
if (isfield(param,'waitBarHandle'))
waitbar(iterNum/param.counterForWaitBar);
end
end
output.CoefMatrix = CoefMatrix;
Dictionary = [FixedDictionaryElement,Dictionary];
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% findBetterDictionaryElement
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function [betterDictionaryElement,CoefMatrix,NewVectorAdded] = I_findBetterDictionaryElement(Data,Dictionary,j,CoefMatrix,numCoefUsed)
if (length(who('numCoefUsed'))==0)
numCoefUsed = 1;
end
relevantDataIndices = find(CoefMatrix(j,:)); % the data indices that uses the j'th dictionary element.
if (length(relevantDataIndices)<1) %(length(relevantDataIndices)==0)
ErrorMat = Data-Dictionary*CoefMatrix;
ErrorNormVec = sum(ErrorMat.^2);
[d,i] = max(ErrorNormVec);
betterDictionaryElement = Data(:,i);%ErrorMat(:,i); %
betterDictionaryElement = betterDictionaryElement./sqrt(betterDictionaryElement'*betterDictionaryElement);
betterDictionaryElement = betterDictionaryElement.*sign(betterDictionaryElement(1));
CoefMatrix(j,:) = 0;
NewVectorAdded = 1;
return;
end
NewVectorAdded = 0;
tmpCoefMatrix = CoefMatrix(:,relevantDataIndices);
tmpCoefMatrix(j,:) = 0;% the coeffitients of the element we now improve are not relevant.
errors =(Data(:,relevantDataIndices) - Dictionary*tmpCoefMatrix); % vector of errors that we want to minimize with the new element
% % the better dictionary element and the values of beta are found using svd.
% % This is because we would like to minimize || errors - beta*element ||_F^2.
% % that is, to approximate the matrix 'errors' with a one-rank matrix. This
% % is done using the largest singular value.
[betterDictionaryElement,singularValue,betaVector] = svds(errors,1);
CoefMatrix(j,relevantDataIndices) = singularValue*betaVector';% *signOfFirstElem
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% findDistanseBetweenDictionaries
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function [ratio,totalDistances] = I_findDistanseBetweenDictionaries(original,new)
% first, all the column in oiginal starts with positive values.
catchCounter = 0;
totalDistances = 0;
for i = 1:size(new,2)
new(:,i) = sign(new(1,i))*new(:,i);
end
for i = 1:size(original,2)
d = sign(original(1,i))*original(:,i);
distances =sum ( (new-repmat(d,1,size(new,2))).^2);
[minValue,index] = min(distances);
errorOfElement = 1-abs(new(:,index)'*d);
totalDistances = totalDistances+errorOfElement;
catchCounter = catchCounter+(errorOfElement<0.01);
end
ratio = 100*catchCounter/size(original,2);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% I_clearDictionary
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function Dictionary = I_clearDictionary(Dictionary,CoefMatrix,Data)
T2 = 0.99;
T1 = 3;
K=size(Dictionary,2);
Er=sum((Data-Dictionary*CoefMatrix).^2,1); % remove identical atoms
G=Dictionary'*Dictionary; G = G-diag(diag(G));
for jj=1:1:K,
if max(G(jj,:))>T2 | length(find(abs(CoefMatrix(jj,:))>1e-7))<=T1 ,
[val,pos]=max(Er);
Er(pos(1))=0;
Dictionary(:,jj)=Data(:,pos(1))/norm(Data(:,pos(1)));
G=Dictionary'*Dictionary; G = G-diag(diag(G));
end;
end;
这是运行代码之后的结果:















 6477
6477

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









