









 本文详细推导了Harris角点检测的数学公式,从椭圆矩阵方程表示开始,深入探讨了椭圆半轴与系数矩阵的关系、泰勒展开及其在Harris算法中的应用。详细解释了自相关函数的计算方法和Harris角点检测原理,最后给出了计算角点的简化经验公式及图像处理流程。
本文详细推导了Harris角点检测的数学公式,从椭圆矩阵方程表示开始,深入探讨了椭圆半轴与系数矩阵的关系、泰勒展开及其在Harris算法中的应用。详细解释了自相关函数的计算方法和Harris角点检测原理,最后给出了计算角点的简化经验公式及图像处理流程。
简介
本文主要是对Harris角点检测的数学公式进行推导,更加深入的掌握原理性的理论知识。
预备知识
椭圆的矩阵方程表示
在高中课本中,我们学习到标准椭圆及其方程(如下图所示):
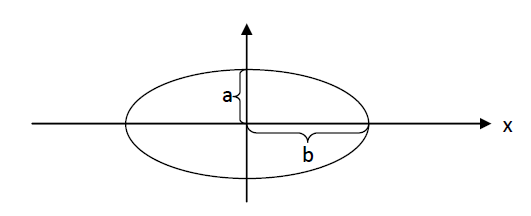
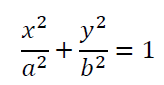
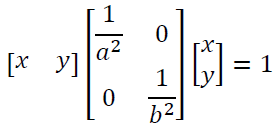
其实,矩阵在运算中使用非常广泛,现将上述标准方程写成矩阵形式(方便接下来的处理):
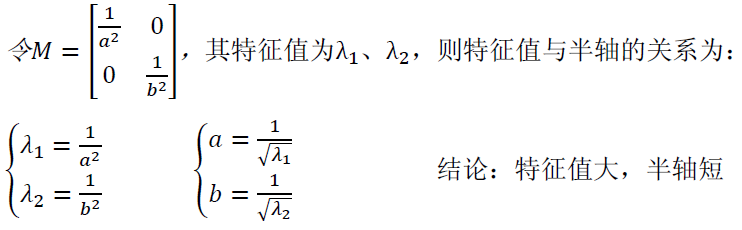
椭圆半轴与系数矩阵的关系
一个nxn的矩阵,可以求解其特征值,我们对上述系数矩阵(含a、b)进行求解,则可得到特征值与椭圆半轴(a、b)的关系,过程如下:
泰勒展开
一元函数的泰勒展开式:

二元函数泰勒展开式:

Harris角点检测原理
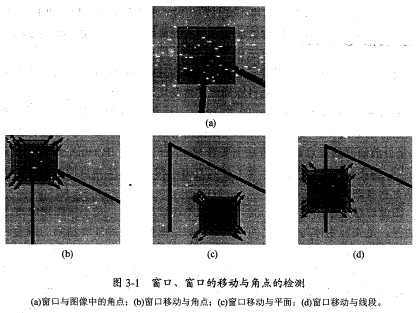
Harris算法是利用的窗口内图像灰度的自相关性进行的,设定一个窗口,并在图像中移动,计算移动前与移动后窗口所在区域图像的自相关系数。
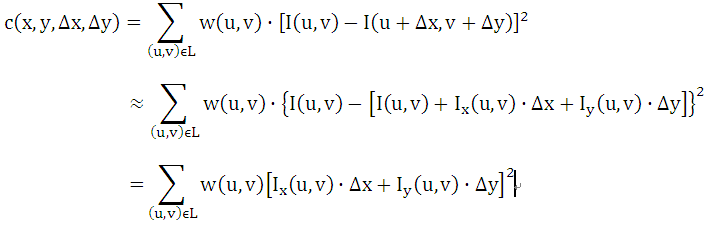
自相关函数计算如下,(x,y)为窗口中心位置,w(u,v)为权重(一般取高斯函数),L表示窗口,(u,v)表示窗口中的图像位置:


将近似值代入自相关函数,有:
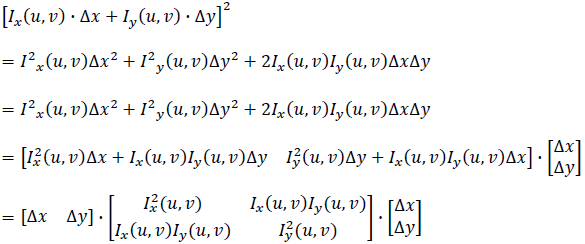
将平方项展开并写成矩阵形式,有:
回到自相关表达式:
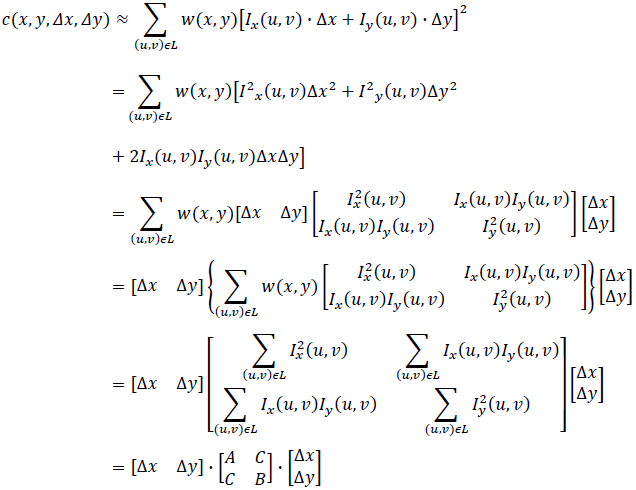
其中,
经过上面的数学形式推导,已经得到了自相关函数的表达式。可以看得这也是一个椭圆的矩阵表示形式(非标准椭圆),因此其系数矩阵M的特征值与椭圆的半轴长短有关,这与上面预备知识中的结论一样。
假设M的特征值为λ1、λ2,则分以下三种情况:
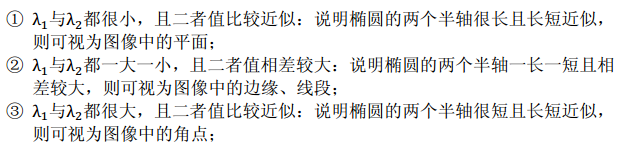
通过上面的情况,计算出特征值后就可以判别是否是角点了。
当然,这样计算量非常大,因为图像中的几乎每个点都需要进行一次特征值的计算;下面给出一个经验公式:

detM表示M的行列式,traceM表示M的迹,R表示角点响应值。α为经验常数,一般在0.04至0.06之间取值。
判断准则:当R超过某个设定的阈值时,可认为是角点;反之,则不是。
如此,便可得到一幅图像中的角点了,最后在3x3或5x5的邻域内进行非极大值抑制操作即可。
参考文献
1、HarrisC,Stephens.M—A Combined Corner and Edge Detector[J],1988.
2、王永明、王贵锦,图像局部不变性特征与描述[M],2010.

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









