







上一章粗略整理了一下坐标系的概念,基本理解如何用坐标来表示地理空间。面对现实的地球,还是有一个疑问。众所周知,我们的地球表面是一个凹凸不平的表面,对于地球测量而言,地表是一个无法用数学公式进行表达的曲面,这样的曲面不能作为制图和测量的基准。所以为了达到我们用数学进行表达的目的,就得对真实的地球进行建模,进行逼近。为了更好的逼近地球,人们引入了以下几个重要概念
一.大地水准面
1.定义:由德国的大地测量学家利斯延于1873提出。假设海水面处于静止平衡状态下,将其延伸到大陆下面,构成一个遍及全球的闭合曲面,这个曲面就是大地水准面。
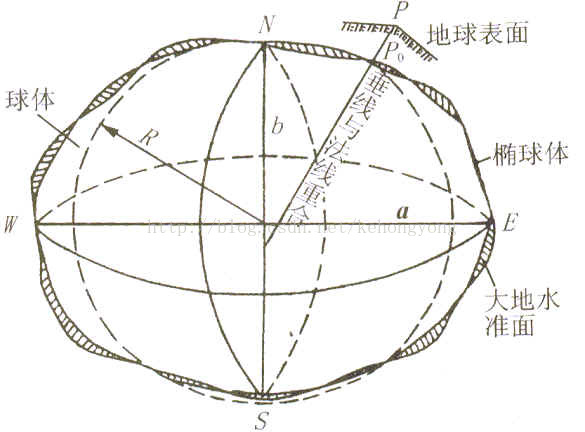
图1.1地球模型示意图
二.旋转椭球体(椭球体)
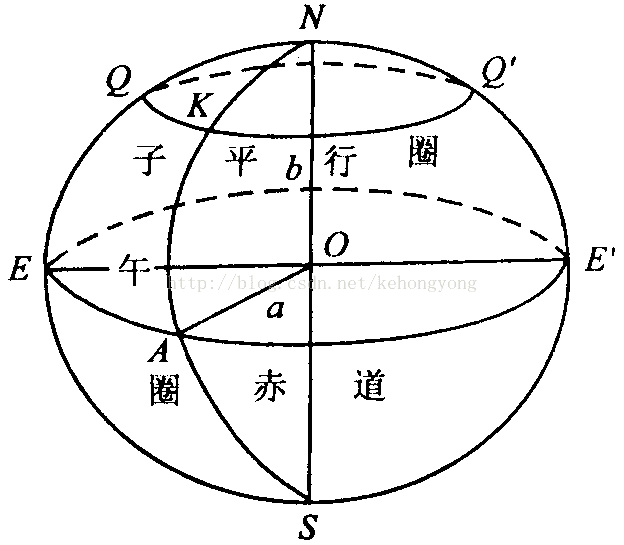
图1.2 旋转椭球体
重要概念
子午圈:包含旋转轴的平面与椭球面相截所得的椭圆
纬圈:垂直于旋转轴的平面与椭球面相截所得的圆
赤道:通过椭球中心的平行圈(纬圈)
地球椭球的五个基本几何参数
椭球的长半轴:a
椭球的短半轴:b
椭圆的扁率:

椭圆的第一偏心率 :

椭圆的第二偏心率 :
其中、称为长度元素;扁率反映了椭球体的扁平程度。偏心率和是子午椭圆的焦点离开中心的距离与椭圆半径之比,它们也反映椭球体的扁平程度,偏心率愈大,椭球愈扁。
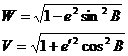
两个常用的辅助函数,W第一基本纬度函数,V第二基本纬度函数:
由于旋转椭球体是通过大地水准面得出的,而当具体到各个国家是,椭球体并不能完美的还原当地的实际情况。所以人们在实际使用中又提出了针对各自地区的参考椭球体模型。
参考椭球体的定义:具有一定几何参数、定位及定向的用以代表某一地区大地水准面的地球椭球。地面上一切观测元素都应归算到参考椭球面上,并在这个面上进行计算。参考椭球面是大地测量计算的基准面,同时又是研究地球形状和地图投影的参考面。
表1.1几种常见的椭球体参数值
克拉索夫斯基椭球体
1975年国际椭球体
WGS-84椭球体
6 378 245.000 000 000 0(m)
6 356 863.018 773 047 3(m)
6 399 698.901 782 711 0(m)
1/298.3
0.006 693 421 622 966
0.006 738 525 414 683
6 378 140.000 000 000 0(m)
6 356 755.288 157 528 7(m)
6 399 596.651 988 010 5(m)
1/298.257
0.006 694 384 999 588
0.006 739 501 819 473
6 378 137.000 000 000 0(m)
6 356 752.314 2(m)
6 399 593.625 8(m)
1/298.257 223 563
0.006 694 379 901 3
0.006 739 496 742 27
我国建立1954年北京坐标系应用的是克拉索夫斯基椭球;建立1980年国家大地坐标系应用的是1975年国际椭球;而全球定位系统(GPS)应用的是WGS-84系椭球参数。
1.大地基准面(引用至http://wenku.baidu.com/view/061c40c7aa00b52acfc7cad1.html)
大地基准面(Geodetic datum),设计用为最密合部份或全部大地水准面的数学模式。它由椭球体本身及椭球体和地表上一点视为原点间之关系来定义。此关系能以6个量来定义,通常(但非必然)是大地纬度
、大地经度、原点高度、原点垂线偏差之两分量及原点至某点的大地方位角。
让我们先抛开测绘学上这个晦涩难懂的概念,看看GIS系统中的基准面是如何定义的,GIS中的基准面通过当地基准面向WGS1984的转换参数来定义,转换通过相似变换方法实现,具体算法可参考科学出版社1999年出版的《城市地理信息系统标准化指南》第76至86页。假设Xg、Yg、Zg表示WGS84地心坐标系的三坐标轴,Xt、Yt、Zt表示当地坐标系的三坐标轴,那么自定义基准面的7参数分别为:三个平移参数ΔX、ΔY
、ΔZ表示两坐标原点的平移值;三个旋转参数εx、εy、εz表示当地坐标系旋转至与地心坐标系平行时,分别绕Xt、Yt、Zt的旋转角;最后是比例校正因子,用于调整椭球大小。
那么现在让我们把地球椭球体和基准面结合起来看,在此我们把地球比做是“马铃薯”,表面凸凹不平,而地球椭球体就好比一个“鸭蛋”,那么按照我们前面的定义,基准面就定义了怎样拿这个“鸭蛋”去逼近“马铃薯”某一个区域的表面,X、Y、Z轴进行一定的偏移,并各自旋转一定的角度,大小不适当的时候就缩放一下“鸭蛋”,那么通过如上的处理必定可以达到很好的逼近地球某一区域的表面。
因此,从这一点上也可以很好的理解,每个国家或地区均有各自的基准面,我们通常称谓的北京54坐标系、西安80坐标系实际上指的是我国的两个大地基准面。我国参照前苏联从1953年起采用克拉索夫斯基(Krassovsky)椭球体建立了我国的北京54坐标系,1978年采用国际大地测量协会推荐的1975地球椭球体(IAG75)建立了我国新的大地坐标系--西安80坐标系,目前大地测量基本上仍以北京54坐标系作为参照,北京54与西安80坐标之间的转换可查阅国家测绘局公布的对照表。WGS1984基准面采用WGS84椭球体,它是一地心坐标系,即以地心作为椭球体中心,目前GPS测量数据多以WGS1984为基准。 克拉索夫斯基(Krassovsky)、1975地球椭球体(IAG75)、WGS1984椭球体的参数可以参考常见的地球椭球体数据表。 椭球体与基准面之间的关系是一对多的关系,也就是基准面是在椭球体基础上建立的,但椭球体不能代表基准面,同样的椭球体能定义不同的基准面。














 8245
8245











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









