









 本文深入剖析了FFmpeg H.264解码器中的环路滤波器实现原理及源代码流程,重点讲解了宏块级别的环路滤波过程,包括滤波器强度判定、滤波条件、滤波公式等内容。
本文深入剖析了FFmpeg H.264解码器中的环路滤波器实现原理及源代码流程,重点讲解了宏块级别的环路滤波过程,包括滤波器强度判定、滤波条件、滤波公式等内容。
=====================================================
H.264源代码分析文章列表:
【编码 - x264】
x264源代码简单分析:x264命令行工具(x264.exe)
x264源代码简单分析:x264_slice_write()
x264源代码简单分析:宏块分析(Analysis)部分-帧内宏块(Intra)
x264源代码简单分析:宏块分析(Analysis)部分-帧间宏块(Inter)
x264源代码简单分析:熵编码(Entropy Encoding)部分
【解码 - libavcodec H.264 解码器】
FFmpeg的H.264解码器源代码简单分析:解析器(Parser)部分
FFmpeg的H.264解码器源代码简单分析:解码器主干部分
FFmpeg的H.264解码器源代码简单分析:熵解码(EntropyDecoding)部分
FFmpeg的H.264解码器源代码简单分析:宏块解码(Decode)部分-帧内宏块(Intra)
FFmpeg的H.264解码器源代码简单分析:宏块解码(Decode)部分-帧间宏块(Inter)
FFmpeg的H.264解码器源代码简单分析:环路滤波(Loop Filter)部分
=====================================================
本文分析FFmpeg的H.264解码器的环路滤波(Loop Filter)部分。FFmpeg的H.264解码器调用decode_slice()函数完成了解码工作。这些解码工作可以大体上分为3个步骤:熵解码,宏块解码以及环路滤波。本文分析这3个步骤中的第3个步骤。
函数调用关系图
环路滤波(Loop Filter)部分的源代码在整个H.264解码器中的位置如下图所示。
环路滤波(Loop Filter)部分的源代码的调用关系如下图所示。

h264_filter_mb_fast_internal()完成了一个宏块的环路滤波工作。该函数调用filter_mb_edgev()和filter_mb_edgeh()对亮度垂直边界和水平边界进行滤波,或者调用filter_mb_edgecv()和filter_mb_edgech()对色度的的垂直边界和水平边界进行滤波。
下面首先回顾一下decode_slice()函数。
decode_slice()
decode_slice()用于解码H.264的Slice。该函数完成了“熵解码”、“宏块解码”、“环路滤波”的功能。它的定义位于libavcodec\h264_slice.c,如下所示。//解码slice
//三个主要步骤:
//1.熵解码(CAVLC/CABAC)
//2.宏块解码
//3.环路滤波
//此外还包含了错误隐藏代码
static int decode_slice(struct AVCodecContext *avctx, void *arg)
{
H264Context *h = *(void **)arg;
int lf_x_start = h->mb_x;
h->mb_skip_run = -1;
av_assert0(h->block_offset[15] == (4 * ((scan8[15] - scan8[0]) & 7) << h->pixel_shift) + 4 * h->linesize * ((scan8[15] - scan8[0]) >> 3));
h->is_complex = FRAME_MBAFF(h) || h->picture_structure != PICT_FRAME ||
avctx->codec_id != AV_CODEC_ID_H264 ||
(CONFIG_GRAY && (h->flags & CODEC_FLAG_GRAY));
if (!(h->avctx->active_thread_type & FF_THREAD_SLICE) && h->picture_structure == PICT_FRAME && h->er.error_status_table) {
const int start_i = av_clip(h->resync_mb_x + h->resync_mb_y * h->mb_width, 0, h->mb_num - 1);
if (start_i) {
int prev_status = h->er.error_status_table[h->er.mb_index2xy[start_i - 1]];
prev_status &= ~ VP_START;
if (prev_status != (ER_MV_END | ER_DC_END | ER_AC_END))
h->er.error_occurred = 1;
}
}
//CABAC情况
if (h->pps.cabac) {
/* realign */
align_get_bits(&h->gb);
/* init cabac */
//初始化CABAC解码器
ff_init_cabac_decoder(&h->cabac,
h->gb.buffer + get_bits_count(&h->gb) / 8,
(get_bits_left(&h->gb) + 7) / 8);
ff_h264_init_cabac_states(h);
//循环处理每个宏块
for (;;) {
// START_TIMER
//解码CABAC数据
int ret = ff_h264_decode_mb_cabac(h);
int eos;
// STOP_TIMER("decode_mb_cabac")
//解码宏块
if (ret >= 0)
ff_h264_hl_decode_mb(h);
// FIXME optimal? or let mb_decode decode 16x32 ?
//宏块级帧场自适应。很少接触
if (ret >= 0 && FRAME_MBAFF(h)) {
h->mb_y++;
ret = ff_h264_decode_mb_cabac(h);
//解码宏块
if (ret >= 0)
ff_h264_hl_decode_mb(h);
h->mb_y--;
}
eos = get_cabac_terminate(&h->cabac);
if ((h->workaround_bugs & FF_BUG_TRUNCATED) &&
h->cabac.bytestream > h->cabac.bytestream_end + 2) {
//错误隐藏
er_add_slice(h, h->resync_mb_x, h->resync_mb_y, h->mb_x - 1,
h->mb_y, ER_MB_END);
if (h->mb_x >= lf_x_start)
loop_filter(h, lf_x_start, h->mb_x + 1);
return 0;
}
if (h->cabac.bytestream > h->cabac.bytestream_end + 2 )
av_log(h->avctx, AV_LOG_DEBUG, "bytestream overread %"PTRDIFF_SPECIFIER"\n", h->cabac.bytestream_end - h->cabac.bytestream);
if (ret < 0 || h->cabac.bytestream > h->cabac.bytestream_end + 4) {
av_log(h->avctx, AV_LOG_ERROR,
"error while decoding MB %d %d, bytestream %"PTRDIFF_SPECIFIER"\n",
h->mb_x, h->mb_y,
h->cabac.bytestream_end - h->cabac.bytestream);
er_add_slice(h, h->resync_mb_x, h->resync_mb_y, h->mb_x,
h->mb_y, ER_MB_ERROR);
return AVERROR_INVALIDDATA;
}
//mb_x自增
//如果自增后超过了一行的mb个数
if (++h->mb_x >= h->mb_width) {
//环路滤波
loop_filter(h, lf_x_start, h->mb_x);
h->mb_x = lf_x_start = 0;
decode_finish_row(h);
//mb_y自增(处理下一行)
++h->mb_y;
//宏块级帧场自适应,暂不考虑
if (FIELD_OR_MBAFF_PICTURE(h)) {
++h->mb_y;
if (FRAME_MBAFF(h) && h->mb_y < h->mb_height)
predict_field_decoding_flag(h);
}
}
//如果mb_y超过了mb的行数
if (eos || h->mb_y >= h->mb_height) {
tprintf(h->avctx, "slice end %d %d\n",
get_bits_count(&h->gb), h->gb.size_in_bits);
er_add_slice(h, h->resync_mb_x, h->resync_mb_y, h->mb_x - 1,
h->mb_y, ER_MB_END);
if (h->mb_x > lf_x_start)
loop_filter(h, lf_x_start, h->mb_x);
return 0;
}
}
} else {
//CAVLC情况
//循环处理每个宏块
for (;;) {
//解码宏块的CAVLC
int ret = ff_h264_decode_mb_cavlc(h);
//解码宏块
if (ret >= 0)
ff_h264_hl_decode_mb(h);
// FIXME optimal? or let mb_decode decode 16x32 ?
if (ret >= 0 && FRAME_MBAFF(h)) {
h->mb_y++;
ret = ff_h264_decode_mb_cavlc(h);
if (ret >= 0)
ff_h264_hl_decode_mb(h);
h->mb_y--;
}
if (ret < 0) {
av_log(h->avctx, AV_LOG_ERROR,
"error while decoding MB %d %d\n", h->mb_x, h->mb_y);
er_add_slice(h, h->resync_mb_x, h->resync_mb_y, h->mb_x,
h->mb_y, ER_MB_ERROR);
return ret;
}
if (++h->mb_x >= h->mb_width) {
//环路滤波
loop_filter(h, lf_x_start, h->mb_x);
h->mb_x = lf_x_start = 0;
decode_finish_row(h);
++h->mb_y;
if (FIELD_OR_MBAFF_PICTURE(h)) {
++h->mb_y;
if (FRAME_MBAFF(h) && h->mb_y < h->mb_height)
predict_field_decoding_flag(h);
}
if (h->mb_y >= h->mb_height) {
tprintf(h->avctx, "slice end %d %d\n",
get_bits_count(&h->gb), h->gb.size_in_bits);
if ( get_bits_left(&h->gb) == 0
|| get_bits_left(&h->gb) > 0 && !(h->avctx->err_recognition & AV_EF_AGGRESSIVE)) {
//错误隐藏
er_add_slice(h, h->resync_mb_x, h->resync_mb_y,
h->mb_x - 1, h->mb_y, ER_MB_END);
return 0;
} else {
er_add_slice(h, h->resync_mb_x, h->resync_mb_y,
h->mb_x, h->mb_y, ER_MB_END);
return AVERROR_INVALIDDATA;
}
}
}
if (get_bits_left(&h->gb) <= 0 && h->mb_skip_run <= 0) {
tprintf(h->avctx, "slice end %d %d\n",
get_bits_count(&h->gb), h->gb.size_in_bits);
if (get_bits_left(&h->gb) == 0) {
er_add_slice(h, h->resync_mb_x, h->resync_mb_y,
h->mb_x - 1, h->mb_y, ER_MB_END);
if (h->mb_x > lf_x_start)
loop_filter(h, lf_x_start, h->mb_x);
return 0;
} else {
er_add_slice(h, h->resync_mb_x, h->resync_mb_y, h->mb_x,
h->mb_y, ER_MB_ERROR);
return AVERROR_INVALIDDATA;
}
}
}
}
}
重复记录一下decode_slice()的流程:
(1)判断H.264码流是CABAC编码还是CAVLC编码,进入不同的处理循环。可以看出,环路滤波函数是loop_filter()。下面看一下这个函数。
(2)如果是CABAC编码,首先调用ff_init_cabac_decoder()初始化CABAC解码器。然后进入一个循环,依次对每个宏块进行以下处理:a)调用ff_h264_decode_mb_cabac()进行CABAC熵解码b)调用ff_h264_hl_decode_mb()进行宏块解码c)解码一行宏块之后调用loop_filter()进行环路滤波d)此外还有可能调用er_add_slice()进行错误隐藏处理(3)如果是CABAC编码,直接进入一个循环,依次对每个宏块进行以下处理:a)调用ff_h264_decode_mb_cavlc()进行CAVLC熵解码b)调用ff_h264_hl_decode_mb()进行宏块解码c)解码一行宏块之后调用loop_filter()进行环路滤波d)此外还有可能调用er_add_slice()进行错误隐藏处理
loop_filter()
loop_filter()完成了环路滤波工作。该函数的定义位于libavcodec\h264_slice.c,如下所示。//环路滤波
static void loop_filter(H264Context *h, int start_x, int end_x)
{
uint8_t *dest_y, *dest_cb, *dest_cr;
int linesize, uvlinesize, mb_x, mb_y;
const int end_mb_y = h->mb_y + FRAME_MBAFF(h);
const int old_slice_type = h->slice_type;
const int pixel_shift = h->pixel_shift;
const int block_h = 16 >> h->chroma_y_shift;
if (h->deblocking_filter) {
//循环处理宏块
//例如从一行开始的mb_x到一行结束的mb_x
for (mb_x = start_x; mb_x < end_x; mb_x++)
for (mb_y = end_mb_y - FRAME_MBAFF(h); mb_y <= end_mb_y; mb_y++) {//逐行扫描只有一行
int mb_xy, mb_type;
mb_xy = h->mb_xy = mb_x + mb_y * h->mb_stride;
h->slice_num = h->slice_table[mb_xy];
mb_type = h->cur_pic.mb_type[mb_xy];
h->list_count = h->list_counts[mb_xy];
if (FRAME_MBAFF(h))
h->mb_mbaff =
h->mb_field_decoding_flag = !!IS_INTERLACED(mb_type);
h->mb_x = mb_x;
h->mb_y = mb_y;
//像素数据
dest_y = h->cur_pic.f.data[0] +
((mb_x << pixel_shift) + mb_y * h->linesize) * 16;
dest_cb = h->cur_pic.f.data[1] +
(mb_x << pixel_shift) * (8 << CHROMA444(h)) +
mb_y * h->uvlinesize * block_h;
dest_cr = h->cur_pic.f.data[2] +
(mb_x << pixel_shift) * (8 << CHROMA444(h)) +
mb_y * h->uvlinesize * block_h;
// FIXME simplify above
if (MB_FIELD(h)) {
linesize = h->mb_linesize = h->linesize * 2;
uvlinesize = h->mb_uvlinesize = h->uvlinesize * 2;
if (mb_y & 1) { // FIXME move out of this function?
dest_y -= h->linesize * 15;
dest_cb -= h->uvlinesize * (block_h - 1);
dest_cr -= h->uvlinesize * (block_h - 1);
}
} else {
linesize = h->mb_linesize = h->linesize;
uvlinesize = h->mb_uvlinesize = h->uvlinesize;
}
backup_mb_border(h, dest_y, dest_cb, dest_cr, linesize,
uvlinesize, 0);
if (fill_filter_caches(h, mb_type))
continue;
h->chroma_qp[0] = get_chroma_qp(h, 0, h->cur_pic.qscale_table[mb_xy]);
h->chroma_qp[1] = get_chroma_qp(h, 1, h->cur_pic.qscale_table[mb_xy]);
//宏块滤波器
if (FRAME_MBAFF(h)) {
//宏块级帧场自适应才用,不研究
ff_h264_filter_mb(h, mb_x, mb_y, dest_y, dest_cb, dest_cr,
linesize, uvlinesize);
} else {
//宏块滤波器(快速?)
ff_h264_filter_mb_fast(h, mb_x, mb_y, dest_y, dest_cb,
dest_cr, linesize, uvlinesize);
}
}
}
h->slice_type = old_slice_type;
h->mb_x = end_x;
h->mb_y = end_mb_y - FRAME_MBAFF(h);
h->chroma_qp[0] = get_chroma_qp(h, 0, h->qscale);
h->chroma_qp[1] = get_chroma_qp(h, 1, h->qscale);
}
从源代码可以看出,loop_filter()循环遍历一行宏块,并且针对每一个宏块调用了ff_h264_filter_mb_fast()函数。
ff_h264_filter_mb_fast()
ff_h264_filter_mb_fast()用于对一个宏块进行环路滤波工作。该函数的定义位于libavcodec\h264_loopfilter.c,如下所示。//宏块滤波器(快速?)
void ff_h264_filter_mb_fast( H264Context *h, int mb_x, int mb_y, uint8_t *img_y, uint8_t *img_cb, uint8_t *img_cr, unsigned int linesize, unsigned int uvlinesize) {
av_assert2(!FRAME_MBAFF(h));
if(!h->h264dsp.h264_loop_filter_strength || h->pps.chroma_qp_diff) {
ff_h264_filter_mb(h, mb_x, mb_y, img_y, img_cb, img_cr, linesize, uvlinesize);
return;
}
#if CONFIG_SMALL
h264_filter_mb_fast_internal(h, mb_x, mb_y, img_y, img_cb, img_cr, linesize, uvlinesize, h->pixel_shift);
#else
//宏块滤波器-internal(快速?)
if(h->pixel_shift){
h264_filter_mb_fast_internal(h, mb_x, mb_y, img_y, img_cb, img_cr, linesize, uvlinesize, 1);
}else{
h264_filter_mb_fast_internal(h, mb_x, mb_y, img_y, img_cb, img_cr, linesize, uvlinesize, 0);
}
#endif
}
可以看出ff_h264_filter_mb_fast()代码比较简单,其中调用了另一个函数h264_filter_mb_fast_internal()。
h264_filter_mb_fast_internal()
h264_filter_mb_fast_internal()用于对一个宏块进行环路滤波。该函数的定义位于libavcodec\h264_loopfilter.c,如下所示。//宏块滤波器-internal(快速?)
static av_always_inline void h264_filter_mb_fast_internal(H264Context *h,
int mb_x, int mb_y,
uint8_t *img_y,
uint8_t *img_cb,
uint8_t *img_cr,
unsigned int linesize,
unsigned int uvlinesize,
int pixel_shift)
{
int chroma = CHROMA(h) && !(CONFIG_GRAY && (h->flags&CODEC_FLAG_GRAY));
int chroma444 = CHROMA444(h);
int chroma422 = CHROMA422(h);
//宏块序号
int mb_xy = h->mb_xy;
int left_type= h->left_type[LTOP];
int top_type= h->top_type;
int qp_bd_offset = 6 * (h->sps.bit_depth_luma - 8);
int a = 52 + h->slice_alpha_c0_offset - qp_bd_offset;
int b = 52 + h->slice_beta_offset - qp_bd_offset;
//宏块类型
int mb_type = h->cur_pic.mb_type[mb_xy];
//量化参数
//qp用于推导alpha,beta(判断是否滤波的门限值)
int qp = h->cur_pic.qscale_table[mb_xy];
int qp0 = h->cur_pic.qscale_table[mb_xy - 1];
int qp1 = h->cur_pic.qscale_table[h->top_mb_xy];
int qpc = get_chroma_qp( h, 0, qp );
int qpc0 = get_chroma_qp( h, 0, qp0 );
int qpc1 = get_chroma_qp( h, 0, qp1 );
qp0 = (qp + qp0 + 1) >> 1;
qp1 = (qp + qp1 + 1) >> 1;
qpc0 = (qpc + qpc0 + 1) >> 1;
qpc1 = (qpc + qpc1 + 1) >> 1;
//Intra类型
if( IS_INTRA(mb_type) ) {
static const int16_t bS4[4] = {4,4,4,4};
static const int16_t bS3[4] = {3,3,3,3};
const int16_t *bSH = FIELD_PICTURE(h) ? bS3 : bS4;
/*
* 帧内宏块滤波
* 滤波顺序如下所示(大方框代表16x16块)
*
* +--4-+--4-+--4-+--4-+
* 0 1 2 3 |
* +--5-+--5-+--5-+--5-+
* 0 1 2 3 |
* +--6-+--6-+--6-+--6-+
* 0 1 2 3 |
* +--7-+--7-+--7-+--7-+
* 0 1 2 3 |
* +----+----+----+----+
*
*/
if(left_type)
//宏块的左边边界,强度bs为4的滤波(Vertical)
filter_mb_edgev( &img_y[4*0<<pixel_shift], linesize, bS4, qp0, a, b, h, 1); //0
//不考虑8x8DCT
if( IS_8x8DCT(mb_type) ) {
filter_mb_edgev( &img_y[4*2<<pixel_shift], linesize, bS3, qp, a, b, h, 0);
if(top_type){
filter_mb_edgeh( &img_y[4*0*linesize], linesize, bSH, qp1, a, b, h, 1);
}
filter_mb_edgeh( &img_y[4*2*linesize], linesize, bS3, qp, a, b, h, 0);
} else {
//宏块内部强度bs为3的滤波(Vertical)
filter_mb_edgev( &img_y[4*1<<pixel_shift], linesize, bS3, qp, a, b, h, 0); //1
filter_mb_edgev( &img_y[4*2<<pixel_shift], linesize, bS3, qp, a, b, h, 0); //2
filter_mb_edgev( &img_y[4*3<<pixel_shift], linesize, bS3, qp, a, b, h, 0); //3
if(top_type){
//宏块的上边边界,强度bs为4的滤波(逐行扫描)(Horizontal)
filter_mb_edgeh( &img_y[4*0*linesize], linesize, bSH, qp1, a, b, h, 1); //4
}
//宏块内部强度bs为3的滤波(Horizontal)
filter_mb_edgeh( &img_y[4*1*linesize], linesize, bS3, qp, a, b, h, 0); //5
filter_mb_edgeh( &img_y[4*2*linesize], linesize, bS3, qp, a, b, h, 0); //6
filter_mb_edgeh( &img_y[4*3*linesize], linesize, bS3, qp, a, b, h, 0); //7
}
if(chroma){
if(chroma444){
if(left_type){
filter_mb_edgev( &img_cb[4*0<<pixel_shift], linesize, bS4, qpc0, a, b, h, 1);
filter_mb_edgev( &img_cr[4*0<<pixel_shift], linesize, bS4, qpc0, a, b, h, 1);
}
if( IS_8x8DCT(mb_type) ) {
filter_mb_edgev( &img_cb[4*2<<pixel_shift], linesize, bS3, qpc, a, b, h, 0);
filter_mb_edgev( &img_cr[4*2<<pixel_shift], linesize, bS3, qpc, a, b, h, 0);
if(top_type){
filter_mb_edgeh( &img_cb[4*0*linesize], linesize, bSH, qpc1, a, b, h, 1 );
filter_mb_edgeh( &img_cr[4*0*linesize], linesize, bSH, qpc1, a, b, h, 1 );
}
filter_mb_edgeh( &img_cb[4*2*linesize], linesize, bS3, qpc, a, b, h, 0);
filter_mb_edgeh( &img_cr[4*2*linesize], linesize, bS3, qpc, a, b, h, 0);
} else {
filter_mb_edgev( &img_cb[4*1<<pixel_shift], linesize, bS3, qpc, a, b, h, 0);
filter_mb_edgev( &img_cr[4*1<<pixel_shift], linesize, bS3, qpc, a, b, h, 0);
filter_mb_edgev( &img_cb[4*2<<pixel_shift], linesize, bS3, qpc, a, b, h, 0);
filter_mb_edgev( &img_cr[4*2<<pixel_shift], linesize, bS3, qpc, a, b, h, 0);
filter_mb_edgev( &img_cb[4*3<<pixel_shift], linesize, bS3, qpc, a, b, h, 0);
filter_mb_edgev( &img_cr[4*3<<pixel_shift], linesize, bS3, qpc, a, b, h, 0);
if(top_type){
filter_mb_edgeh( &img_cb[4*0*linesize], linesize, bSH, qpc1, a, b, h, 1);
filter_mb_edgeh( &img_cr[4*0*linesize], linesize, bSH, qpc1, a, b, h, 1);
}
//水平horizontal
filter_mb_edgeh( &img_cb[4*1*linesize], linesize, bS3, qpc, a, b, h, 0);
filter_mb_edgeh( &img_cr[4*1*linesize], linesize, bS3, qpc, a, b, h, 0);
filter_mb_edgeh( &img_cb[4*2*linesize], linesize, bS3, qpc, a, b, h, 0);
filter_mb_edgeh( &img_cr[4*2*linesize], linesize, bS3, qpc, a, b, h, 0);
filter_mb_edgeh( &img_cb[4*3*linesize], linesize, bS3, qpc, a, b, h, 0);
filter_mb_edgeh( &img_cr[4*3*linesize], linesize, bS3, qpc, a, b, h, 0);
}
}else if(chroma422){
if(left_type){
filter_mb_edgecv(&img_cb[2*0<<pixel_shift], uvlinesize, bS4, qpc0, a, b, h, 1);
filter_mb_edgecv(&img_cr[2*0<<pixel_shift], uvlinesize, bS4, qpc0, a, b, h, 1);
}
filter_mb_edgecv(&img_cb[2*2<<pixel_shift], uvlinesize, bS3, qpc, a, b, h, 0);
filter_mb_edgecv(&img_cr[2*2<<pixel_shift], uvlinesize, bS3, qpc, a, b, h, 0);
if(top_type){
filter_mb_edgech(&img_cb[4*0*uvlinesize], uvlinesize, bSH, qpc1, a, b, h, 1);
filter_mb_edgech(&img_cr[4*0*uvlinesize], uvlinesize, bSH, qpc1, a, b, h, 1);
}
filter_mb_edgech(&img_cb[4*1*uvlinesize], uvlinesize, bS3, qpc, a, b, h, 0);
filter_mb_edgech(&img_cr[4*1*uvlinesize], uvlinesize, bS3, qpc, a, b, h, 0);
filter_mb_edgech(&img_cb[4*2*uvlinesize], uvlinesize, bS3, qpc, a, b, h, 0);
filter_mb_edgech(&img_cr[4*2*uvlinesize], uvlinesize, bS3, qpc, a, b, h, 0);
filter_mb_edgech(&img_cb[4*3*uvlinesize], uvlinesize, bS3, qpc, a, b, h, 0);
filter_mb_edgech(&img_cr[4*3*uvlinesize], uvlinesize, bS3, qpc, a, b, h, 0);
}else{
if(left_type){
filter_mb_edgecv( &img_cb[2*0<<pixel_shift], uvlinesize, bS4, qpc0, a, b, h, 1);
filter_mb_edgecv( &img_cr[2*0<<pixel_shift], uvlinesize, bS4, qpc0, a, b, h, 1);
}
filter_mb_edgecv( &img_cb[2*2<<pixel_shift], uvlinesize, bS3, qpc, a, b, h, 0);
filter_mb_edgecv( &img_cr[2*2<<pixel_shift], uvlinesize, bS3, qpc, a, b, h, 0);
if(top_type){
filter_mb_edgech( &img_cb[2*0*uvlinesize], uvlinesize, bSH, qpc1, a, b, h, 1);
filter_mb_edgech( &img_cr[2*0*uvlinesize], uvlinesize, bSH, qpc1, a, b, h, 1);
}
filter_mb_edgech( &img_cb[2*2*uvlinesize], uvlinesize, bS3, qpc, a, b, h, 0);
filter_mb_edgech( &img_cr[2*2*uvlinesize], uvlinesize, bS3, qpc, a, b, h, 0);
}
}
return;
} else {
//非Intra类型
LOCAL_ALIGNED_8(int16_t, bS, [2], [4][4]);
int edges;
if( IS_8x8DCT(mb_type) && (h->cbp&7) == 7 && !chroma444 ) {
edges = 4;
AV_WN64A(bS[0][0], 0x0002000200020002ULL);
AV_WN64A(bS[0][2], 0x0002000200020002ULL);
AV_WN64A(bS[1][0], 0x0002000200020002ULL);
AV_WN64A(bS[1][2], 0x0002000200020002ULL);
} else {
int mask_edge1 = (3*(((5*mb_type)>>5)&1)) | (mb_type>>4); //(mb_type & (MB_TYPE_16x16 | MB_TYPE_8x16)) ? 3 : (mb_type & MB_TYPE_16x8) ? 1 : 0;
int mask_edge0 = 3*((mask_edge1>>1) & ((5*left_type)>>5)&1); // (mb_type & (MB_TYPE_16x16 | MB_TYPE_8x16)) && (h->left_type[LTOP] & (MB_TYPE_16x16 | MB_TYPE_8x16)) ? 3 : 0;
int step = 1+(mb_type>>24); //IS_8x8DCT(mb_type) ? 2 : 1;
edges = 4 - 3*((mb_type>>3) & !(h->cbp & 15)); //(mb_type & MB_TYPE_16x16) && !(h->cbp & 15) ? 1 : 4;
h->h264dsp.h264_loop_filter_strength( bS, h->non_zero_count_cache, h->ref_cache, h->mv_cache,
h->list_count==2, edges, step, mask_edge0, mask_edge1, FIELD_PICTURE(h));
}
if( IS_INTRA(left_type) )
AV_WN64A(bS[0][0], 0x0004000400040004ULL);
if( IS_INTRA(top_type) )
AV_WN64A(bS[1][0], FIELD_PICTURE(h) ? 0x0003000300030003ULL : 0x0004000400040004ULL);
//专门定义了一个宏?
#define FILTER(hv,dir,edge,intra)\
if(AV_RN64A(bS[dir][edge])) { \
filter_mb_edge##hv( &img_y[4*edge*(dir?linesize:1<<pixel_shift)], linesize, bS[dir][edge], edge ? qp : qp##dir, a, b, h, intra );\
if(chroma){\
if(chroma444){\
filter_mb_edge##hv( &img_cb[4*edge*(dir?linesize:1<<pixel_shift)], linesize, bS[dir][edge], edge ? qpc : qpc##dir, a, b, h, intra );\
filter_mb_edge##hv( &img_cr[4*edge*(dir?linesize:1<<pixel_shift)], linesize, bS[dir][edge], edge ? qpc : qpc##dir, a, b, h, intra );\
} else if(!(edge&1)) {\
filter_mb_edgec##hv( &img_cb[2*edge*(dir?uvlinesize:1<<pixel_shift)], uvlinesize, bS[dir][edge], edge ? qpc : qpc##dir, a, b, h, intra );\
filter_mb_edgec##hv( &img_cr[2*edge*(dir?uvlinesize:1<<pixel_shift)], uvlinesize, bS[dir][edge], edge ? qpc : qpc##dir, a, b, h, intra );\
}\
}\
}
/*
* 非Intra宏块滤波
* 滤波顺序如下所示(大方框代表16x16块)
*
* +--4-+--4-+--4-+--4-+
* 0 1 2 3 |
* +--5-+--5-+--5-+--5-+
* 0 1 2 3 |
* +--6-+--6-+--6-+--6-+
* 0 1 2 3 |
* +--7-+--7-+--7-+--7-+
* 0 1 2 3 |
* +----+----+----+----+
*
*/
if(left_type)
FILTER(v,0,0,1); //0
if( edges == 1 ) {
if(top_type)
FILTER(h,1,0,1);
} else if( IS_8x8DCT(mb_type) ) {
FILTER(v,0,2,0);
if(top_type)
FILTER(h,1,0,1);
FILTER(h,1,2,0);
} else {
FILTER(v,0,1,0); //1
FILTER(v,0,2,0); //2
FILTER(v,0,3,0); //3
if(top_type)
FILTER(h,1,0,1);//4
FILTER(h,1,1,0); //5
FILTER(h,1,2,0); //6
FILTER(h,1,3,0); //7
}
#undef FILTER
}
}
通过源代码整理出来h264_filter_mb_fast_internal()的流程如下:
(1)读取QP等几个参数,用于推导滤波门限值alpha,beta。
(2)如果是帧内宏块(Intra),作如下处理:
a)对于水平的边界,调用filter_mb_edgeh()进行滤波。
b)对于垂直的边界,调用filter_mb_edgev()进行滤波。
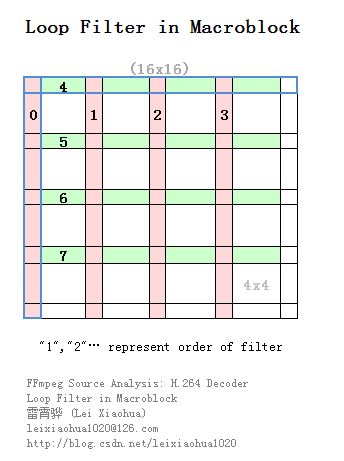
帧内宏块滤波过程中,对于在宏块边界上的边界(最左边的垂直边界和最上边的水平边界),采用滤波强度Bs为4的滤波;对于其它边界则采用滤波强度Bs为3的滤波。(3)如果是其他宏块,作如下处理:
a)对于水平的边界,调用filter_mb_edgeh()进行滤波。
b)对于垂直的边界,调用filter_mb_edgev()进行滤波。
此类宏块的滤波强度需要另作判断。总体说来,一个宏块内部的滤波顺序如下图所示。图中的“0”、“1”、“2”、“3”为滤波的顺序。可以看出首先对垂直边界进行滤波,然后对水平边界进行滤波。垂直边界滤波按照从左到右的顺序进行,而水平边界的滤波按照从上到下的顺序进行。
下面分别看一下对水平边界滤波的函数filter_mb_edgeh()以及对垂直边界滤波的函数filter_mb_edgev()。
filter_mb_edgeh()
filter_mb_edgeh()用于对水平边界进行滤波。该函数定义位于libavcodec\h264_loopfilter.c,如下所示。//滤波水平边界(Horizontal)-亮度
//垂直(Vertical)滤波器
// 边界
// x
// x
// 边界----------
// x
// x
static av_always_inline void filter_mb_edgeh(uint8_t *pix, int stride,
const int16_t bS[4],
unsigned int qp, int a, int b,
H264Context *h, int intra)
{
//alpha,beta为判断是否滤波的门限值
//它们是通过将(qp+offset)作为索引查表得到的
//qp大(压缩大),门限高,更容易发生滤波
const unsigned int index_a = qp + a;
const int alpha = alpha_table[index_a];
const int beta = beta_table[qp + b];
//门限为0,不用滤波了
if (alpha ==0 || beta == 0) return;
if( bS[0] < 4 || !intra ) {
int8_t tc[4];
tc[0] = tc0_table[index_a][bS[0]];
tc[1] = tc0_table[index_a][bS[1]];
tc[2] = tc0_table[index_a][bS[2]];
tc[3] = tc0_table[index_a][bS[3]];
//边界强度3以下(弱滤波)
h->h264dsp.h264_v_loop_filter_luma(pix, stride, alpha, beta, tc);
} else {
//边界强度为4个滤波(强滤波)
h->h264dsp.h264_v_loop_filter_luma_intra(pix, stride, alpha, beta);
}
}
从filter_mb_edgeh()的定义可以看出,该函数首先计算了alpha,beta两个滤波的门限值,然后根据输入信息判断是否需要强滤波。如果需要强滤波(Bs取值为4),就调用H264DSPContext中的滤波汇编函数h264_v_loop_filter_luma_intra();如果不需要强滤波(Bs取值为1、2、3),就调用H264DSPContext中的滤波汇编函数h264_v_loop_filter_luma()。
在这里有一点需要注意,对水平边界进行滤波的函数(函数名中包含“_edgeh”),调用的是垂直滤波函数(函数名中包含“_v”)。
filter_mb_edgev()
filter_mb_edgev()用于对垂直边界进行滤波。该函数定义位于libavcodec\h264_loopfilter.c,如下所示。//滤波垂直边界(Vertical)-亮度
//水平(Horizontal)滤波器
// 边界
// |
// x x x | x x x
// |
static av_always_inline void filter_mb_edgev(uint8_t *pix, int stride,
const int16_t bS[4],
unsigned int qp, int a, int b,
H264Context *h, int intra)
{
const unsigned int index_a = qp + a;
const int alpha = alpha_table[index_a];
const int beta = beta_table[qp + b];
if (alpha ==0 || beta == 0) return;
if( bS[0] < 4 || !intra ) {
int8_t tc[4];
tc[0] = tc0_table[index_a][bS[0]];
tc[1] = tc0_table[index_a][bS[1]];
tc[2] = tc0_table[index_a][bS[2]];
tc[3] = tc0_table[index_a][bS[3]];
//Bs取值为1,2,3的弱滤波
h->h264dsp.h264_h_loop_filter_luma(pix, stride, alpha, beta, tc);
} else {
//Bs取值为4的强滤波
h->h264dsp.h264_h_loop_filter_luma_intra(pix, stride, alpha, beta);
}
}
可以看出filter_mb_edgev()的定义与filter_mb_edgeh()是类似的。也是先计算了alpha,beta两个滤波的门限值,然后根据输入信息判断是否需要强滤波。如果需要强滤波(Bs取值为4),就调用H264DSPContext中的滤波汇编函数h264_h_loop_filter_luma_intra();如果不需要强滤波(Bs取值为1、2、3),就调用H264DSPContext中的滤波汇编函数h264_h_loop_filter_luma()。下文将会对H264DSPContext中的h264_h_loop_filter_luma()和h264_h_loop_filter_luma_intra()这两个汇编函数进行分析。
环路滤波小知识
H.264解码器在解码后的数据一般情况下会出现方块效应。产生这种效应的原因主要有两个:(1)DCT变换后的量化造成误差(主要原因)。
(2)运动补偿
正是由于这种块效应的存在,才需要添加环路滤波器调整相邻的“块”边缘上的像素值以减轻这种视觉上的不连续感。下面一张图显示了环路滤波的效果。图中左边的图没有使用环路滤波,而右边的图使用了环路滤波。

环路滤波分类
环路滤波器根据滤波的强度可以分为两种:(1)普通滤波器。针对边界的Bs(边界强度)为1、2、3的滤波器。此时环路滤波涉及到方块边界周围的6个点(边界两边各3个点):p2,p1,p0,q0,q1,q2。需要处理4个点(边界两边各2个点,只以p点为例):
(2)强滤波器。针对边界的Bs(边界强度)为4的滤波器。此时环路滤波涉及到方块边界周围的8个点(边界两边各4个点):p3,p2,p1,p0,q0,q1,q2,q3。需要处理6个点(边界两边各3个点,只以p点为例):
其中上文中提到的边界强度Bs的判定方式如下。
条件(针对两边的图像块) | Bs |
有一个块为帧内预测 + 边界为宏块边界 | 4 |
有一个块为帧内预测 | 3 |
有一个块对残差编码 | 2 |
运动矢量差不小于1像素 | 1 |
运动补偿参考帧不同 | 1 |
其它 | 0 |
总体说来,与帧内预测相关的图像块(帧内预测块)的边界强度比较大,取值为3或者4;与运动补偿相关的图像块(帧间预测块)的边界强度比较小,取值为1。
环路滤波的门限
并不是所有的块的边界处都需要环路滤波。例如画面中物体的边界正好和块的边界重合的话,就不能进行滤波,否则会使画面中物体的边界变模糊。因此需要区别开物体边界和块效应边界。一般情况下,物体边界两边的像素值差别很大,而块效应边界两边像素值差别比较小。《H.264标准》以这个特点定义了2个变量alpha和beta来判决边界是否需要进行环路滤波。只有满足下面三个条件的时候才能进行环路滤波:
| p0 - q0 | < alpha
| q1 - q0 | < beta
简而言之,就是边界两边的两个点的像素值不能太大,即不能超过alpha;边界一边的前两个点之间的像素值也不能太大,即不能超过beta。其中alpha和beta是根据量化参数QP推算出来(具体方法不再记录)。总体说来QP越大,alpha和beta的值也越大,也就越容易触发环路滤波。由于QP越大表明压缩的程度越大,所以也可以得知高压缩比的情况下更需要进行环路滤波。有关环路滤波的基本知识就记录到这里,下文开始分析和环路滤波相关的汇编函数的源代码。
环路滤波汇编函数
首先看一下环路滤波汇编函数的初始化函数ff_h264dsp_init()。
ff_h264dsp_init()
ff_h264dsp_init()用于初始化环路滤波函数(实际上该函数也用于初始化DCT反变换和Hadamard反变换函数)。该函数的定义位于libavcodec\h264dsp.c,如下所示。//初始化DSP相关的函数。包含了IDCT、环路滤波函数等
av_cold void ff_h264dsp_init(H264DSPContext *c, const int bit_depth,
const int chroma_format_idc)
{
#undef FUNC
#define FUNC(a, depth) a ## _ ## depth ## _c
#define ADDPX_DSP(depth) \
c->h264_add_pixels4_clear = FUNC(ff_h264_add_pixels4, depth);\
c->h264_add_pixels8_clear = FUNC(ff_h264_add_pixels8, depth)
if (bit_depth > 8 && bit_depth <= 16) {
ADDPX_DSP(16);
} else {
ADDPX_DSP(8);
}
#define H264_DSP(depth) \
c->h264_idct_add= FUNC(ff_h264_idct_add, depth);\
c->h264_idct8_add= FUNC(ff_h264_idct8_add, depth);\
c->h264_idct_dc_add= FUNC(ff_h264_idct_dc_add, depth);\
c->h264_idct8_dc_add= FUNC(ff_h264_idct8_dc_add, depth);\
c->h264_idct_add16 = FUNC(ff_h264_idct_add16, depth);\
c->h264_idct8_add4 = FUNC(ff_h264_idct8_add4, depth);\
if (chroma_format_idc <= 1)\
c->h264_idct_add8 = FUNC(ff_h264_idct_add8, depth);\
else\
c->h264_idct_add8 = FUNC(ff_h264_idct_add8_422, depth);\
c->h264_idct_add16intra= FUNC(ff_h264_idct_add16intra, depth);\
c->h264_luma_dc_dequant_idct= FUNC(ff_h264_luma_dc_dequant_idct, depth);\
if (chroma_format_idc <= 1)\
c->h264_chroma_dc_dequant_idct= FUNC(ff_h264_chroma_dc_dequant_idct, depth);\
else\
c->h264_chroma_dc_dequant_idct= FUNC(ff_h264_chroma422_dc_dequant_idct, depth);\
\
c->weight_h264_pixels_tab[0]= FUNC(weight_h264_pixels16, depth);\
c->weight_h264_pixels_tab[1]= FUNC(weight_h264_pixels8, depth);\
c->weight_h264_pixels_tab[2]= FUNC(weight_h264_pixels4, depth);\
c->weight_h264_pixels_tab[3]= FUNC(weight_h264_pixels2, depth);\
c->biweight_h264_pixels_tab[0]= FUNC(biweight_h264_pixels16, depth);\
c->biweight_h264_pixels_tab[1]= FUNC(biweight_h264_pixels8, depth);\
c->biweight_h264_pixels_tab[2]= FUNC(biweight_h264_pixels4, depth);\
c->biweight_h264_pixels_tab[3]= FUNC(biweight_h264_pixels2, depth);\
\
c->h264_v_loop_filter_luma= FUNC(h264_v_loop_filter_luma, depth);\
c->h264_h_loop_filter_luma= FUNC(h264_h_loop_filter_luma, depth);\
c->h264_h_loop_filter_luma_mbaff= FUNC(h264_h_loop_filter_luma_mbaff, depth);\
c->h264_v_loop_filter_luma_intra= FUNC(h264_v_loop_filter_luma_intra, depth);\
c->h264_h_loop_filter_luma_intra= FUNC(h264_h_loop_filter_luma_intra, depth);\
c->h264_h_loop_filter_luma_mbaff_intra= FUNC(h264_h_loop_filter_luma_mbaff_intra, depth);\
c->h264_v_loop_filter_chroma= FUNC(h264_v_loop_filter_chroma, depth);\
if (chroma_format_idc <= 1)\
c->h264_h_loop_filter_chroma= FUNC(h264_h_loop_filter_chroma, depth);\
else\
c->h264_h_loop_filter_chroma= FUNC(h264_h_loop_filter_chroma422, depth);\
if (chroma_format_idc <= 1)\
c->h264_h_loop_filter_chroma_mbaff= FUNC(h264_h_loop_filter_chroma_mbaff, depth);\
else\
c->h264_h_loop_filter_chroma_mbaff= FUNC(h264_h_loop_filter_chroma422_mbaff, depth);\
c->h264_v_loop_filter_chroma_intra= FUNC(h264_v_loop_filter_chroma_intra, depth);\
if (chroma_format_idc <= 1)\
c->h264_h_loop_filter_chroma_intra= FUNC(h264_h_loop_filter_chroma_intra, depth);\
else\
c->h264_h_loop_filter_chroma_intra= FUNC(h264_h_loop_filter_chroma422_intra, depth);\
if (chroma_format_idc <= 1)\
c->h264_h_loop_filter_chroma_mbaff_intra= FUNC(h264_h_loop_filter_chroma_mbaff_intra, depth);\
else\
c->h264_h_loop_filter_chroma_mbaff_intra= FUNC(h264_h_loop_filter_chroma422_mbaff_intra, depth);\
c->h264_loop_filter_strength= NULL;
//根据颜色位深,初始化不同的函数
//一般为8bit,即执行H264_DSP(8)
switch (bit_depth) {
case 9:
H264_DSP(9);
break;
case 10:
H264_DSP(10);
break;
case 12:
H264_DSP(12);
break;
case 14:
H264_DSP(14);
break;
default:
av_assert0(bit_depth<=8);
H264_DSP(8);
break;
}
//这个函数查找startcode的时候用到
//在这里竟然单独列出
c->startcode_find_candidate = ff_startcode_find_candidate_c;
//如果系统支持,则初始化经过汇编优化的函数
if (ARCH_AARCH64) ff_h264dsp_init_aarch64(c, bit_depth, chroma_format_idc);
if (ARCH_ARM) ff_h264dsp_init_arm(c, bit_depth, chroma_format_idc);
if (ARCH_PPC) ff_h264dsp_init_ppc(c, bit_depth, chroma_format_idc);
if (ARCH_X86) ff_h264dsp_init_x86(c, bit_depth, chroma_format_idc);
}
从源代码可以看出,ff_h264dsp_init()初始化了环路滤波函数,DCT反变换函数和Hadamard反变换函数。下面展开“H264_DSP(8)”宏看一下C语言版本函数初始化的代码。
c->h264_idct_add= ff_h264_idct_add_8_c;
c->h264_idct8_add= ff_h264_idct8_add_8_c;
c->h264_idct_dc_add= ff_h264_idct_dc_add_8_c;
c->h264_idct8_dc_add= ff_h264_idct8_dc_add_8_c;
c->h264_idct_add16 = ff_h264_idct_add16_8_c;
c->h264_idct8_add4 = ff_h264_idct8_add4_8_c;
if (chroma_format_idc <= 1)
c->h264_idct_add8 = ff_h264_idct_add8_8_c;
else
c->h264_idct_add8 = ff_h264_idct_add8_422_8_c;
c->h264_idct_add16intra= ff_h264_idct_add16intra_8_c;
c->h264_luma_dc_dequant_idct= ff_h264_luma_dc_dequant_idct_8_c;
if (chroma_format_idc <= 1)
c->h264_chroma_dc_dequant_idct= ff_h264_chroma_dc_dequant_idct_8_c;
else
c->h264_chroma_dc_dequant_idct= ff_h264_chroma422_dc_dequant_idct_8_c;
c->weight_h264_pixels_tab[0]= weight_h264_pixels16_8_c;
c->weight_h264_pixels_tab[1]= weight_h264_pixels8_8_c;
c->weight_h264_pixels_tab[2]= weight_h264_pixels4_8_c;
c->weight_h264_pixels_tab[3]= weight_h264_pixels2_8_c;
c->biweight_h264_pixels_tab[0]= biweight_h264_pixels16_8_c;
c->biweight_h264_pixels_tab[1]= biweight_h264_pixels8_8_c;
c->biweight_h264_pixels_tab[2]= biweight_h264_pixels4_8_c;
c->biweight_h264_pixels_tab[3]= biweight_h264_pixels2_8_c;
c->h264_v_loop_filter_luma= h264_v_loop_filter_luma_8_c;
c->h264_h_loop_filter_luma= h264_h_loop_filter_luma_8_c;
c->h264_h_loop_filter_luma_mbaff= h264_h_loop_filter_luma_mbaff_8_c;
c->h264_v_loop_filter_luma_intra= h264_v_loop_filter_luma_intra_8_c;
c->h264_h_loop_filter_luma_intra= h264_h_loop_filter_luma_intra_8_c;
c->h264_h_loop_filter_luma_mbaff_intra=
h264_h_loop_filter_luma_mbaff_intra_8_c;
c->h264_v_loop_filter_chroma= h264_v_loop_filter_chroma_8_c;
if (chroma_format_idc <= 1)
c->h264_h_loop_filter_chroma= h264_h_loop_filter_chroma_8_c;
else
c->h264_h_loop_filter_chroma= h264_h_loop_filter_chroma422_8_c;
if (chroma_format_idc <= 1)
c->h264_h_loop_filter_chroma_mbaff=
h264_h_loop_filter_chroma_mbaff_8_c;
else
c->h264_h_loop_filter_chroma_mbaff=
h264_h_loop_filter_chroma422_mbaff_8_c;
c->h264_v_loop_filter_chroma_intra= h264_v_loop_filter_chroma_intra_8_c;
if (chroma_format_idc <= 1)
c->h264_h_loop_filter_chroma_intra=
h264_h_loop_filter_chroma_intra_8_c;
else
c->h264_h_loop_filter_chroma_intra=
h264_h_loop_filter_chroma422_intra_8_c;
if (chroma_format_idc <= 1)
c->h264_h_loop_filter_chroma_mbaff_intra=
h264_h_loop_filter_chroma_mbaff_intra_8_c;
else
c->h264_h_loop_filter_chroma_mbaff_intra=
h264_h_loop_filter_chroma422_mbaff_intra_8_c;
c->h264_loop_filter_strength= ((void *)0);
从“H264_DSP(8)”宏展开的结果可以看出,和亮度环路滤波有关的C语言函数有如下4个:
h264_v_loop_filter_luma_8_c():亮度垂直的普通滤波。
h264_h_loop_filter_luma_8_c():亮度水平的普通滤波。
h264_v_loop_filter_luma_intra_8_c():亮度垂直的强滤波。h264_h_loop_filter_luma_intra_8_c():亮度水平的强滤波。
下面分别分析这4个函数的源代码。
h264_v_loop_filter_luma_8_c()
h264_v_loop_filter_luma_8_c()实现了亮度边界垂直普通滤波器(处理水平边界)。该函数的定义位于libavcodec\h264dsp_template.c,如下所示。//垂直(Vertical)普通滤波器
// 边界
// x
// x
// 边界----------
// x
// x
static void h264_v_loop_filter_luma_8_c(uint8_t *pix, int stride, int alpha, int beta, int8_t *tc0)
{
//xstride=stride(用于选择滤波的像素)
//ystride=1
//inner_iters=4
h264_loop_filter_luma_8_c(pix, stride, sizeof(pixel), 4, alpha, beta, tc0);
}
从源代码中可以看出,h264_v_loop_filter_luma_8_c()调用了另一个函数h264_loop_filter_luma_8_c()。需要注意在调用h264_loop_filter_luma_8_c()的时候传递的3个主要的参数:
xstride=stride
ystride=1
inner_iters=4这几个参数中的xstride,ystride决定了滤波器的方向。下面看一下垂直和水平方向通用的普通滤波函数h264_loop_filter_luma_8_c()的定义。
h264_loop_filter_luma_8_c()
h264_loop_filter_luma_8_c()用于垂直或者水平滤波的普通滤波器(Bs取值为1、2、3)函数。该函数的定义位于libavcodec\h264dsp_template.c。原函数中包含了一些宏定义,宏定义展开后的结果如下所示。//-----------------------------------------------------------------------
//代码中函数名包含大量的“FUNCC”的宏,该宏的定义如下所示
//“FUNCC(xxx)”展开后的结果为“xxx_8_c”,即在“xxx”后面加上“_8_c”
//下面的代码中为了阅读方便,手动展开了一些重要函数的“FUNCC”宏。
//但是手动展开宏比较麻烦,所以还是有一些“FUNCC”宏没有展开
/*
* 环路滤波函数(Loop Filter)展开结果
*
* 源代码注释和处理:雷霄骅
* leixiaohua1020@126.com
* http://blog.csdn.net/leixiaohua1020
*/
//亮度的环路滤波器-普通滤波器
//边界强度Bs取1,2,3
//参数:
//p_pix:像素数据
//xstride,ystride:决定了是横向边界滤波器还是纵向边界滤波器
//inner_iters:逐行扫描为4
//alpha,beta:决定滤波器是否滤波的门限值,由QP确定。QP大,门限会高一些,更有可能滤波。
//tc0:限幅值,由QP确定。QP大,限幅值会高一些,相对宽松。此外边界强度Bs大,限幅值也会大。
//普通滤波涉及到方块边界周围的6个点(边界两边各3个点):p2,p1,p0,q0,q1,q2。
static av_always_inline av_flatten void h264_loop_filter_luma_8_c(uint8_t *p_pix, int xstride, int ystride, int inner_iters, int alpha, int beta, int8_t *tc0)
{
//pixel代表了一个像素,在这里是uint8_t,定义如下所示
//# define pixel uint8_t
pixel *pix = (pixel*)p_pix;
int i, d;
//不右移
xstride >>= sizeof(pixel)-1;
ystride >>= sizeof(pixel)-1;
//BIT_DEPTH在这里取值为8,定义如下所示
//#define BIT_DEPTH 8
alpha <<= BIT_DEPTH - 8;
beta <<= BIT_DEPTH - 8;
//循环一共4x4=16次,相当于处理了16个点,与宏块的宽度是相同的
/*
* [滤波示例] 大方框代表一个宏块
*
* xstride=1,ystride=stride
*
* +----+----+----+----+
* | X | | |
* +----+----+----+----+
* | X | | |
* +----+----+----+----+
* | X | | |
* +----+----+----+----+
* | X | | |
* +----+----+----+----+
*
* xstride=stride,ystride=1
*
* +----+----+----+----+
* | | | | |
* +--X-+--X-+--X-+--X-+
* | | | | |
* +----+----+----+----+
* | | | | |
* +----+----+----+----+
* | | | | |
* +----+----+----+----+
*/
//外部循环4次
for( i = 0; i < 4; i++ ) {
const int tc_orig = tc0[i] << (BIT_DEPTH - 8);
if( tc_orig < 0 ) {
pix += inner_iters*ystride;
continue;
}
//一般inner_iters=4
for( d = 0; d < inner_iters; d++ ) {
//p和q
//如果xstride=stride,ystride=1
//就是处理纵向的6个像素
//对应的是方块的横向边界的滤波(后文以此举例子)。如下所示:
// p2
// p1
// p0
//=====图像边界=====
// q0
// q1
// q2
//
//如果xstride=1,ystride=stride
//就是处理纵向的6个像素
//对应的是方块的横向边界的滤波,即如下所示:
// ||
// p2 p1 p0 || q0 q1 q2
// ||
// 边界
//注意:这里乘的是xstride
const int p0 = pix[-1*xstride];
const int p1 = pix[-2*xstride];
const int p2 = pix[-3*xstride];
const int q0 = pix[0];
const int q1 = pix[1*xstride];
const int q2 = pix[2*xstride];
//计算方法参考相关的标准
//alpha和beta是用于检查图像内容的2个参数
//只有满足if()里面3个取值条件的时候(只涉及边界旁边的4个点),才会滤波
if( FFABS( p0 - q0 ) < alpha &&
FFABS( p1 - p0 ) < beta &&
FFABS( q1 - q0 ) < beta ) {
int tc = tc_orig;
int i_delta;
//上面2个点(p0,p2)满足条件的时候,滤波p1
if( FFABS( p2 - p0 ) < beta ) {
//av_clip(int a, int amin, int amax)用于限幅: Clip a signed integer value into the amin-amax range.
if(tc_orig)
pix[-2*xstride] = p1 + av_clip( (( p2 + ( ( p0 + q0 + 1 ) >> 1 ) ) >> 1) - p1, -tc_orig, tc_orig );
tc++;
}
//下面2个点(q0,q2)满足条件的时候,滤波q1
if( FFABS( q2 - q0 ) < beta ) {
//q1
if(tc_orig)
pix[ xstride] = q1 + av_clip( (( q2 + ( ( p0 + q0 + 1 ) >> 1 ) ) >> 1) - q1, -tc_orig, tc_orig );
tc++;
}
i_delta = av_clip( (((q0 - p0 ) << 2) + (p1 - q1) + 4) >> 3, -tc, tc );
//p0
pix[-xstride] = av_clip_pixel( p0 + i_delta ); /* p0' */
//q0
pix[0] = av_clip_pixel( q0 - i_delta ); /* q0' */
}
//移动指针
//注意:这里加的是ystride
pix += ystride;
}
}
}
由于源代码中写了比较充分的注释,在这里就不再逐行解析代码了。可以看出函数中包含了两个嵌套的for()循环,每个for()循环循环4次,合计运行16次。for()循环执行一遍即完成了一次水平(或者垂直)的滤波,所以for()循环执行完毕的时候,就完成了对宏块中一个纵向边界(或者横向边界)的滤波。
函数的输入参数xstride和ystride决定了函数是水平滤波器还是垂直滤波器。如果xstride=stride、ystride=1,滤波器处理垂直的6个像素,为垂直滤波器;xstride=1、ystride=stride,滤波器处理水平的6个像素,为水平滤波器。
函数在确定了处理的6个点之后,就会根据滤波的门限值alpha和beta判定边界是否满足滤波条件。如果满足条件,就会根据下面的公式进行滤波(只列出p点的,q点类似):
h264_h_loop_filter_luma_8_c()
h264_h_loop_filter_luma_8_c()实现了亮度边界水平普通滤波器(处理垂直边界)。该函数的定义位于libavcodec\h264dsp_template.c,如下所示。//水平(Horizontal)普通滤波器
// 边界
// |
// x x x | x x x
// |
static void h264_h_loop_filter_luma_8_c(uint8_t *pix, int stride, int alpha, int beta, int8_t *tc0)
{
//xstride=1(用于选择滤波的像素)
//ystride=stride
//inner_iters=4
h264_loop_filter_luma_8_c(pix, sizeof(pixel), stride, 4, alpha, beta, tc0);
}
从源代码中可以看出,h264_h_loop_filter_luma_8_c()和h264_v_loop_filter_luma_8_c()类似,也调用了h264_loop_filter_luma_8_c()。需要注意在调用h264_loop_filter_luma_8_c()的时候传递的3个主要的参数:
xstride=1
ystride=stride
inner_iters=4h264_v_loop_filter_luma_intra_8_c()
h264_v_loop_filter_luma_intra_8_c()实现了亮度边界垂直强滤波器(处理水平边界)。该函数的定义位于libavcodec\h264dsp_template.c,如下所示。//垂直(Vertical)强滤波器
// 边界
// x
// x
// 边界----------
// x
// x
static void h264_v_loop_filter_luma_intra_8_c(uint8_t *pix, int stride, int alpha, int beta)
{
//xstride=stride
//ystride=1
//inner_iters=4
h264_loop_filter_luma_intra_8_c(pix, stride, sizeof(pixel), 4, alpha, beta);
}
可以看出h264_v_loop_filter_luma_intra_8_c()调用了水平垂直通用的强滤波器函数h264_loop_filter_luma_intra_8_c()。并传递了以下参数:
xstride=stride
ystride=1
inner_iters=4h264_loop_filter_luma_intra_8_c()
h264_loop_filter_luma_intra_8_c()是用于垂直或者水平滤波的强滤波器(Bs取值为4)函数。该函数的定义位于libavcodec\h264dsp_template.c,定义如下所示。//亮度的环路滤波器-强滤波器
//边界强度Bs取4(最强)
//强滤波涉及到方块边界周围的8个点(边界两边各4个点):p3,p2,p1,p0,q0,q1,q2,q3
static av_always_inline av_flatten void h264_loop_filter_luma_intra_8_c(uint8_t *p_pix, int xstride, int ystride, int inner_iters, int alpha, int beta)
{
pixel *pix = (pixel*)p_pix;
int d;
xstride >>= sizeof(pixel)-1;
ystride >>= sizeof(pixel)-1;
alpha <<= BIT_DEPTH - 8;
beta <<= BIT_DEPTH - 8;
//循环一共16次,相当于处理了16个点,与宏块的宽度是相同的
/*
* [滤波示例] 大方框代表一个宏块
*
* xstride=1,ystride=stride
*
* +----+----+----+----+
* X | | | |
* +----+----+----+----+
* X | | | |
* +----+----+----+----+
* X | | | |
* +----+----+----+----+
* X | | | |
* +----+----+----+----+
*
* xstride=stride,ystride=1
*
* +--X-+--X-+--X-+--X-+
* | | | | |
* +----+----+----+----+
* | | | | |
* +----+----+----+----+
* | | | | |
* +----+----+----+----+
* | | | | |
* +----+----+----+----+
*/
//一般inner_iters=4
for( d = 0; d < 4 * inner_iters; d++ ) {
//p和q
//如果xstride=stride,ystride=1
//就是处理纵向的6个像素
//对应的是方块的横向边界的滤波(后文以此举例子)。如下所示:
// p2
// p1
// p0
//=====图像边界=====
// q0
// q1
// q2
//
//如果xstride=1,ystride=stride
//就是处理纵向的6个像素
//对应的是方块的横向边界的滤波,即如下所示:
// ||
// p2 p1 p0 || q0 q1 q2
// ||
// 边界
//注意:这里乘的是xstride
const int p2 = pix[-3*xstride];
const int p1 = pix[-2*xstride];
const int p0 = pix[-1*xstride];
const int q0 = pix[ 0*xstride];
const int q1 = pix[ 1*xstride];
const int q2 = pix[ 2*xstride];
if( FFABS( p0 - q0 ) < alpha &&
FFABS( p1 - p0 ) < beta &&
FFABS( q1 - q0 ) < beta ) {
//满足条件的时候,使用强滤波器
if(FFABS( p0 - q0 ) < (( alpha >> 2 ) + 2 )){
//p
if( FFABS( p2 - p0 ) < beta)
{
const int p3 = pix[-4*xstride];
/* p0', p1', p2' */
pix[-1*xstride] = ( p2 + 2*p1 + 2*p0 + 2*q0 + q1 + 4 ) >> 3;
pix[-2*xstride] = ( p2 + p1 + p0 + q0 + 2 ) >> 2;
pix[-3*xstride] = ( 2*p3 + 3*p2 + p1 + p0 + q0 + 4 ) >> 3;
} else {
//不满足条件的时候
/* p0' */
pix[-1*xstride] = ( 2*p1 + p0 + q1 + 2 ) >> 2;
}
//q
if( FFABS( q2 - q0 ) < beta)
{
const int q3 = pix[3*xstride];
/* q0', q1', q2' */
pix[0*xstride] = ( p1 + 2*p0 + 2*q0 + 2*q1 + q2 + 4 ) >> 3;
pix[1*xstride] = ( p0 + q0 + q1 + q2 + 2 ) >> 2;
pix[2*xstride] = ( 2*q3 + 3*q2 + q1 + q0 + p0 + 4 ) >> 3;
} else {
/* q0' */
pix[0*xstride] = ( 2*q1 + q0 + p1 + 2 ) >> 2;
}
}else{
//不满足条件的时候,使用下式修正
/* p0', q0' */
pix[-1*xstride] = ( 2*p1 + p0 + q1 + 2 ) >> 2;
pix[ 0*xstride] = ( 2*q1 + q0 + p1 + 2 ) >> 2;
}
}
pix += ystride;
}
}
由于源代码中写了比较充分的注释,在这里就不再逐行解析代码了。可以看出函数中包含了一个会执行16次的for()循环。for()循环执行一遍即完成了一次水平(或者垂直)的滤波,所以for()循环执行完毕的时候,就完成了对宏块中一个纵向边界(或者横向边界)的滤波。
函数的输入参数xstride和ystride决定了函数是水平滤波器还是垂直滤波器。如果xstride=stride、ystride=1,滤波器处理垂直的8个像素,为垂直滤波器;xstride=1、ystride=stride,滤波器处理水平的8个像素,为水平滤波器。
函数在确定了处理的8个点之后,就会根据滤波的门限值alpha和beta判定边界是否满足滤波条件。如果满足条件,就会根据下面的公式进行滤波(只列出p点的,q点类似):
h264_h_loop_filter_luma_intra_8_c()
h264_v_loop_filter_luma_intra_8_c()实现了亮度边界水平强滤波器(处理垂直边界)。该函数的定义位于libavcodec\h264dsp_template.c,如下所示。//水平(Horizontal)强滤波器
// 边界
// |
// x x x | x x x
// |
static void h264_h_loop_filter_luma_intra_8_c(uint8_t *pix, int stride, int alpha, int beta)
{
//xstride=1
//ystride=stride
//inner_iters=4
h264_loop_filter_luma_intra_8_c(pix, sizeof(pixel), stride, 4, alpha, beta);
}
可以看出h264_h_loop_filter_luma_intra_8_c()和h264_v_loop_filter_luma_intra_8_c()类似,都调用了h264_loop_filter_luma_intra_8_c()。
雷霄骅
leixiaohua1020@126.com
http://blog.csdn.net/leixiaohua1020


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









