







(1)首先我们来看三幅图片理解什么是角点:
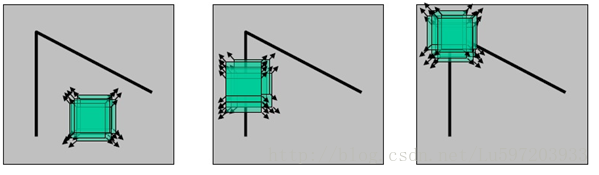
我们在图片以某像素点为中心,取一窗口,当窗口向各个方向移动时,其内部灰度值变化不是很明显,则该点即处在平坦区域(如左边图);当其内部灰度值只在几个固定的方向上变化较为明显,那么该点则处在边缘区域(如图中间部分);当向各个方向移动,其变化都是很明显,则该点为角点(如图右)。
当然,上面所说的变化明显与否,是与我们事先设定的阀值进行对比的。
(2)moravec算法对角点定义:
窗口在各个方向上移动,窗口内的灰度值都会产生较大的变化。但实际程序中,这里的各个方向实际只有8个方向。即米形0°,45°,90°,135°,180°,225°,270°,315°。
例如:
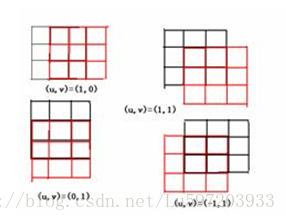
这里我们为了简单起见,我们只取了四个方向(0°,45°,90°,135°),取一个w*w(如:5x5)的方形窗口, 计算0度、45度、90度、135度四个方向灰度差的平方和, 取其中的最小值作为该像素点的兴趣值(如下图)。
公式:

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1245
1245











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









