







1、角点介绍
角点检测(Corner Detection)是计算机视觉系统中用来获得图像特征的一种方法,广泛应用于运动检测、图像匹配、视频跟踪、三维建模和目标识别等领域中,也称为特征点检测。在图像中角点是一个重要的局部特征,它决定了图像中关键区域的形状,体现了图像中重要的特征信息。目前,角点检测方法主要有2大类:
1)基于图像边缘轮廓特征的方法。
2)基于图像灰度信息的方法。此方法主要通过计算曲率及梯度进行角点检测,通过计算边缘的曲率来判断角点的存在性。典型代表有Harris算法、Susan算法、Moravec算法等。
角点通常被定义为两条边的交点,更严格的说,角点的局部邻域应该具有两个不同区域的不同方向的边界。而实际应用中,大多数所谓的角点检测方法检测的是拥有特定特征的图像点,而不仅仅是“角点”。这些特征点在图像中有具体的坐标,并具有某些数学特征,如局部最大或最小灰度、某些梯度特征等。现有的角点检测算法并不是都十分的健壮。很多方法都要求有大量的训练集和冗余数据来防止或减少错误特征的出现。另外,角点检测方法的一个很重要的评价标准是其对多幅图像中相同或相似特征的检测能力,并且能够应对光照变化、图像旋转等图像变化。
2、Harris算法介绍
Harris 是 Harris 和 Stephens 在 1988 年提出,专门针对 Moravec 算子的改进版。Harris 算子,又称 Plessey算子,它基于与 Moravec 相同的角点定义,即定义在各个方向上灰度值变化的点。
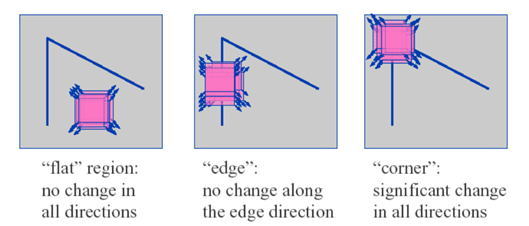
角点可以如下图形象的定义,如果在各个方向上移动这个小窗口,窗口内的灰度发生了较大的变化,那么说明窗口内存在角点;如果在各个方向移动,灰度几乎不变,说明是平坦区域;如果只沿着某一个方向移动,灰度几乎不变,说明是直线(边缘)。
设图像窗口平移[u,v] ,产生的灰度变化为E[u,v] ,则:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 9983
9983











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









