






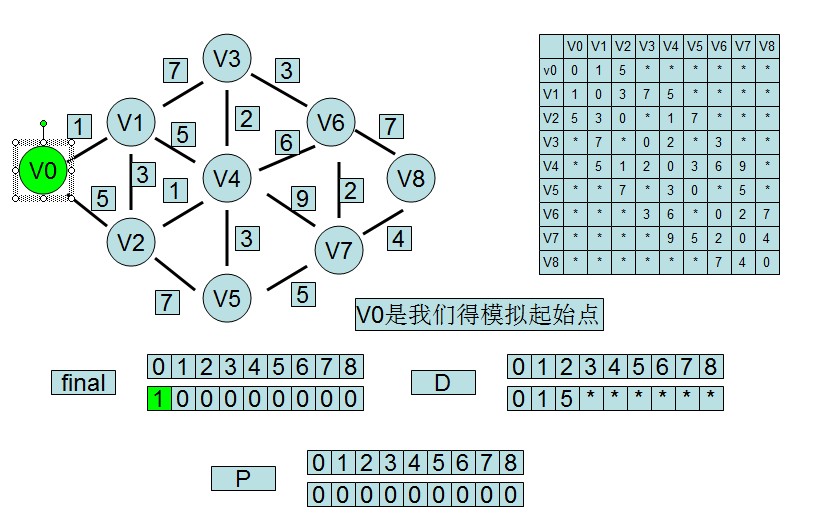
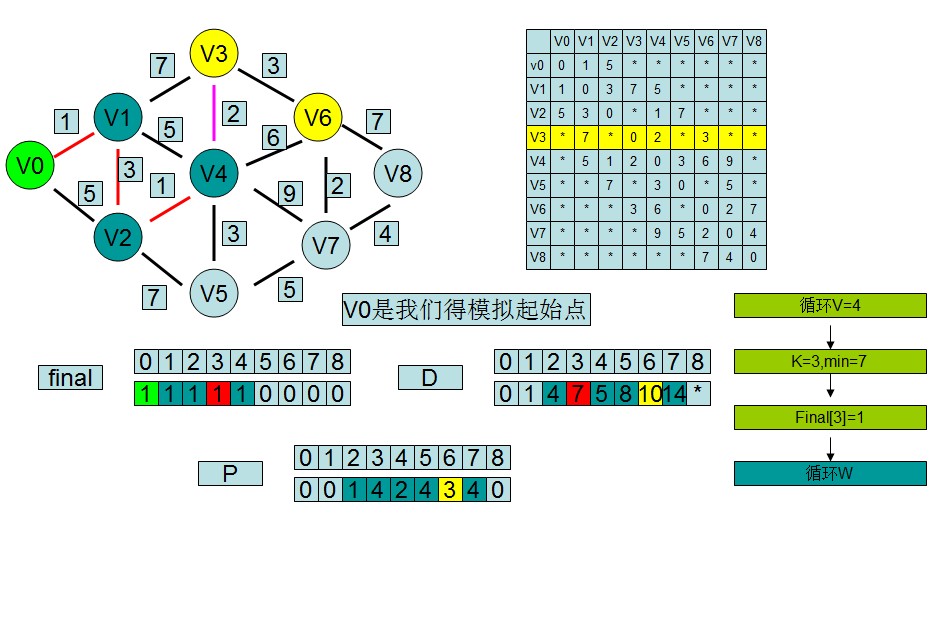
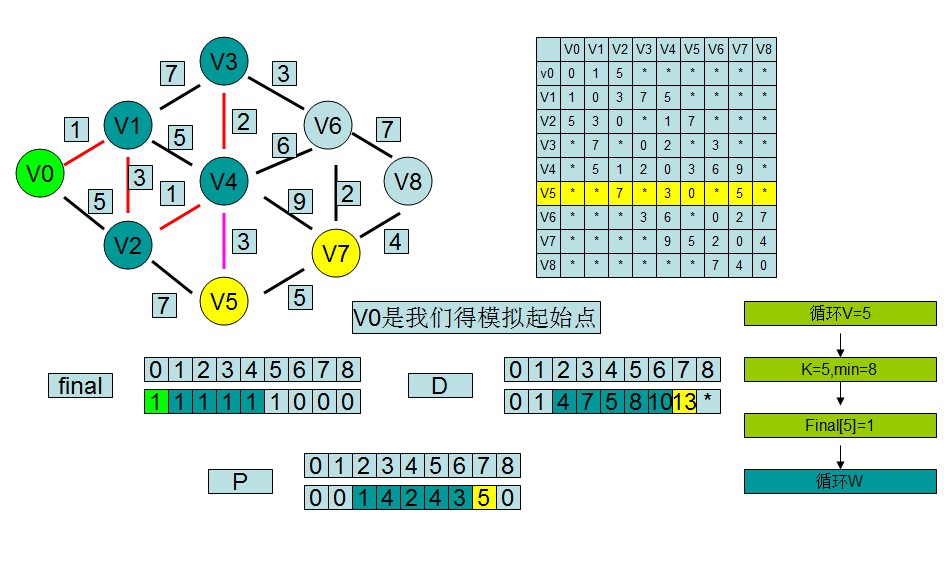
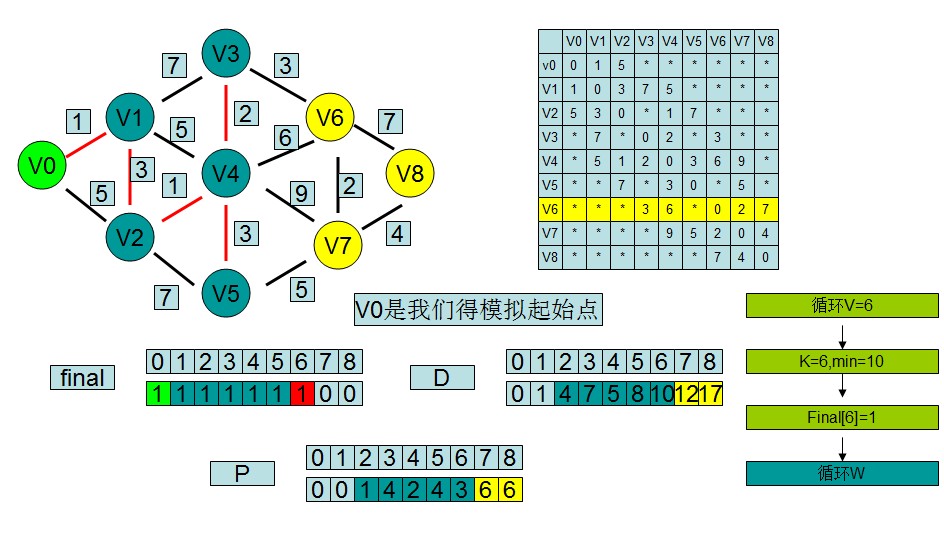
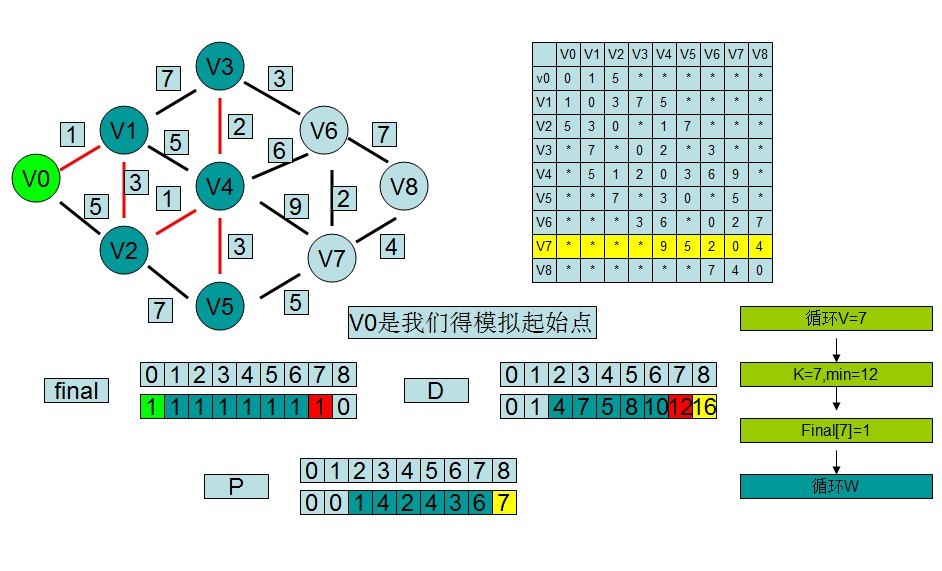
迪杰斯特拉算法原理(Dijkstra)寻找最短的路径,这算法和普利姆算法类似,它是一种贪心算法,不断的寻找最优的路径!
#define MAXVEX 9
#define INFINITY 65536
int Patharc[MAXVEX];//用于存储最短路径下标的数组
int ShortPathTable[MAXVEX];//用于存储到各点最短路径的权值和
void ShortTestPath_Dijkstra(MGraph G,int V0,Patharc *p,ShortPathTable *D){
//G顶点的矩形举证,V0 表示起始的顶点,p=Patharc,D=ShortPathTable
int v,w,k,min;
int final[MAXVEX];//final[w] =1 表示已经求得顶点V0到VW的最短路径
//初始化路径
for(v=0;v<G.numVertexes;v++){
final[v]=0;//全部顶点初始化为未找到的最短路径
(*D)[v]=G.arc[V0][v];//将于V0点有连线的顶点加上权值
(*P)[v]=0;//初始化路径数组P为0
}
(*D)[V0]=0;//V0 到V0的路径为0
final[V0]=1;//V0 到V0不需要求路径
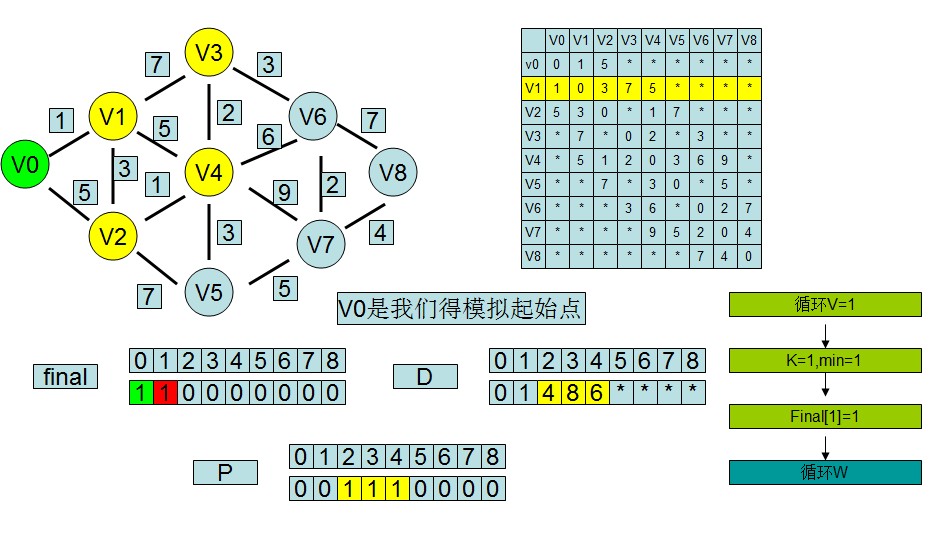
//开始主循环,每次求得到V0到某个V顶点的最短路径
for(v=1;v<G.numVertexes;v++){
min=INFINITY;
for(w=0;w<G.numVertexes;w++){
if(!final[w] && (*D)[w]<min){
k=w;//获取最小的路径
min=(*D)[w];
}
}
final[k]=1;//将目前找到的最近顶点设1
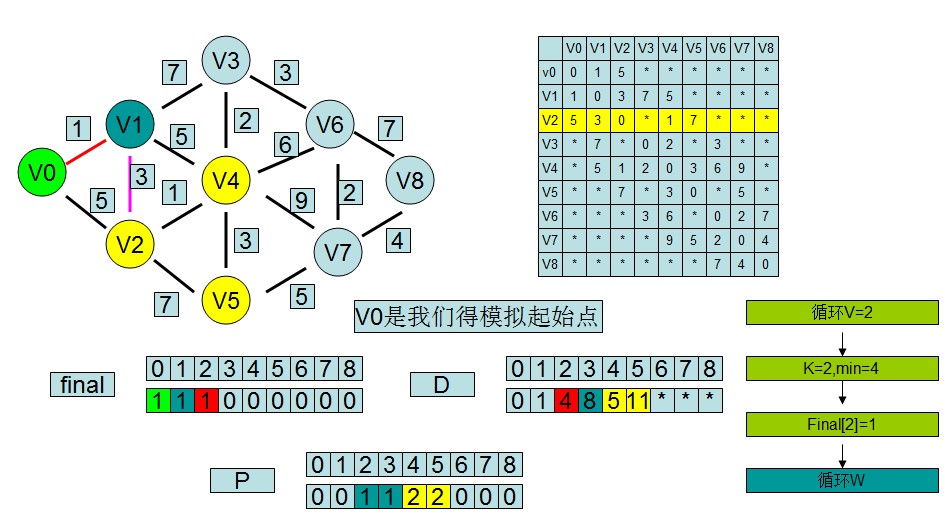
//修正当前最短路径及距离
for(w=0;w<G.numVertexes;w++){
//如果经过v顶点的路径比现在这条路径的长度短的话,更新!
if(!final[w] && (min+G.arc[k][w] < (*D)[w])){
(*D)[w]=min+G.arc[k][w];//修改当前路径长度
(*p)[w]=k;//存放前驱顶点
}
}
}
}















 992
992

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









