







Mastering OpenCV with Practical Computer Vision Projects 中的第三章里面讲到了几种特征点匹配的优化方式
1. OpenCV提供了两种Matching方式:
• Brute-force matcher (cv::BFMatcher)
• Flann-based matcher (cv::FlannBasedMatcher)
Brute-force matcher就是用暴力方法找到点集一中每个descriptor在点集二中距离最近的descriptor;
Flann-based matcher 使用快速近似最近邻搜索算法寻找(用快速的第三方库近似最近邻搜索算法)
一般把点集一称为 train set (训练集)对应模板图像,点集二称为 query set(查询集)对应查找模板图的目标图像。
为了提高检测速度,你可以调用matching函数前,先训练一个matcher。训练过程可以首先使用cv::FlannBasedMatcher来优化,为descriptor建立索引树,这种操作将在匹配大量数据时发挥巨大作用(比如在上百幅图像的数据集中查找匹配图像)。而Brute-force matcher在这个过程并不进行操作,它只是将train descriptors保存在内存中。
2. 在matching过程中可以使用cv::DescriptorMatcher的如下功能来进行匹配:
- 简单查找最优匹配:void match(const Mat& queryDescriptors, vector<DMatch>& matches,const vector<Mat>& masks=vector<Mat>() );
- 为每个descriptor查找K-nearest-matches:void knnMatch(const Mat& queryDescriptors, vector<vector<DMatch> >& matches, int k,const vector<Mat>&masks=vector<Mat>(),bool compactResult=false );
- 查找那些descriptors间距离小于特定距离的匹配:void radiusMatch(const Mat& queryDescriptors, vector<vector<DMatch> >& matches, maxDistance, const vector<Mat>& masks=vector<Mat>(), bool compactResult=false );
3. matching结果包含许多错误匹配,错误的匹配分为两种:
- False-positive matches: 将非对应特征点检测为匹配(我们可以对他做文章,尽量消除它)
- False-negative matches: 未将匹配的特征点检测出来(无法处理,因为matching算法拒绝)
为了消除False-positive matches采用如下两种方式:
- Cross-match filter:
在OpenCV中 cv::BFMatcher class已经支持交叉验证,建立
cv::BFMatcher将第二参数声明为true
cv::Ptr<cv::DescriptorMatcher> matcher(new cv::BFMatcher(cv::NORM_HAMMING,true));
经过
Cross-match filter的结果:

- Ratio test
使用KNN-matching算法,令K=2。则每个match得到两个最接近的descriptor,然后计算最接近距离和次接近距离之间的比值,当比值大于既定值时,才作为最终match。
4. Homography estimation
为了进一步提升匹配精度,可以采用随机样本一致性(RANSAC)方法。
因为我们是使用一幅图像(一个平面物体),我们可以将它定义为刚性的,可以在pattern image和query image的特征点之间找到单应性变换(homography transformation
)。使用cv::findHomography找到这个单应性变换,使用RANSAC找到最佳单应性矩阵。(由于这个函数使用的特征点同时包含正确和错误匹配点,因此计算的单应性矩阵依赖于二次投影的准确性)


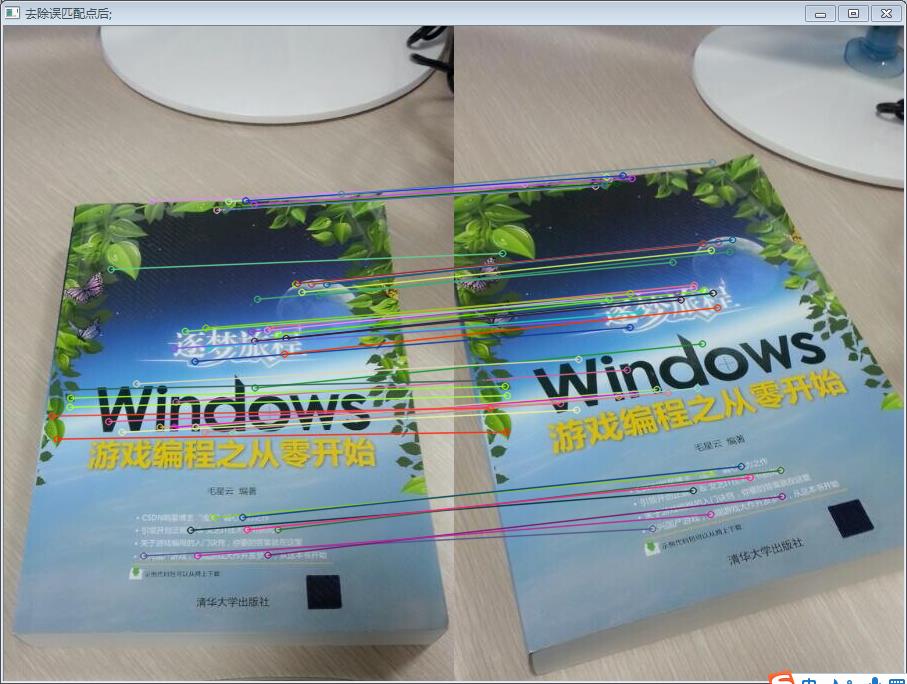
运用H矩阵进行误匹配点去除:
#include "opencv2/core/core.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/calib3d/calib3d.hpp"
#include "opencv2/nonfree/nonfree.hpp"
#include <iostream>
using namespace cv;
using namespace std;
int main( )
{
//【0】改变console字体颜色
system("color 1F");
//【1】载入原始图片
Mat srcImage1 = imread( "1.jpg", 1 );
Mat srcImage2 = imread( "2.jpg", 1 );
Mat copysrcImage1=srcImage1.clone();
Mat copysrcImage2=srcImage2.clone();
if( !srcImage1.data || !srcImage2.data )
{ printf("读取图片错误,请确定目录下是否有imread函数指定的图片存在~! \n"); return false; }
//【2】使用SURF算子检测关键点
int minHessian = 400;//SURF算法中的hessian阈值
SurfFeatureDetector detector( minHessian );//定义一个SurfFeatureDetector(SURF) 特征检测类对象
vector<KeyPoint> keypoints_object, keypoints_scene;//vector模板类,存放任意类型的动态数组
//【3】调用detect函数检测出SURF特征关键点,保存在vector容器中
detector.detect( srcImage1, keypoints_object );
detector.detect( srcImage2, keypoints_scene );
//【4】计算描述符(特征向量)
SurfDescriptorExtractor extractor;
Mat descriptors_object, descriptors_scene;
extractor.compute( srcImage1, keypoints_object, descriptors_object );
extractor.compute( srcImage2, keypoints_scene, descriptors_scene );
//【5】使用FLANN匹配算子进行匹配
FlannBasedMatcher matcher;
vector< DMatch > matches;
matcher.match( descriptors_object, descriptors_scene, matches );
double max_dist = 0; double min_dist = 100;//最小距离和最大距离
//【6】计算出关键点之间距离的最大值和最小值
for( int i = 0; i < descriptors_object.rows; i++ )
{
double dist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
}
printf(">Max dist 最大距离 : %f \n", max_dist );
printf(">Min dist 最小距离 : %f \n", min_dist );
//【7】存下匹配距离小于3*min_dist的点对
std::vector< DMatch > good_matches;
for( int i = 0; i < descriptors_object.rows; i++ )
{
if( matches[i].distance < 3*min_dist )
{
good_matches.push_back( matches[i]);
}
}
//绘制出匹配到的关键点
Mat img_matches;
drawMatches( srcImage1, keypoints_object, srcImage2, keypoints_scene,
good_matches, img_matches, Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS );
//定义两个局部变量
vector<Point2f> obj;
vector<Point2f> scene;
//从匹配成功的匹配对中获取关键点
for( unsigned int i = 0; i < good_matches.size(); i++ )
{
obj.push_back( keypoints_object[ good_matches[i].queryIdx ].pt );
scene.push_back( keypoints_scene[ good_matches[i].trainIdx ].pt );
}
vector<unsigned char> listpoints;
//Mat H = findHomography( obj, scene, CV_RANSAC );//计算透视变换
Mat H = findHomography( obj, scene, CV_RANSAC,3, listpoints);//计算透视变换
std::vector< DMatch > goodgood_matches;
for (int i=0;i<listpoints.size();i++)
{
if ((int)listpoints[i])
{
goodgood_matches.push_back(good_matches[i]);
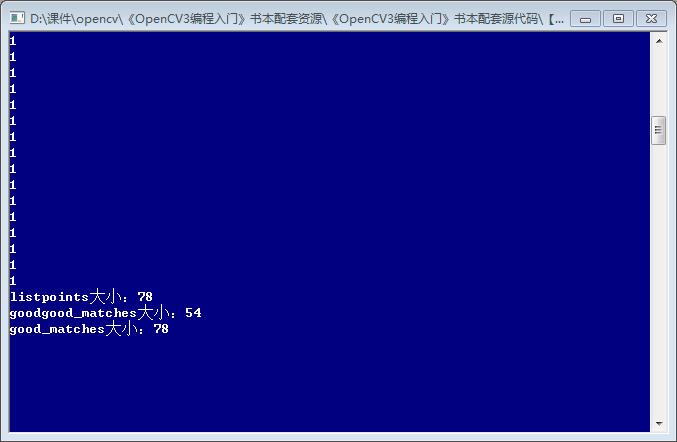
cout<<(int)listpoints[i]<<endl;
}
}
cout<<"listpoints大小:"<<listpoints.size()<<endl;
cout<<"goodgood_matches大小:"<<goodgood_matches.size()<<endl;
cout<<"good_matches大小:"<<good_matches.size()<<endl;
Mat Homgimg_matches;
drawMatches( copysrcImage1, keypoints_object, copysrcImage2, keypoints_scene,
goodgood_matches, Homgimg_matches, Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS );
imshow("去除误匹配点后;",Homgimg_matches);
//从待测图片中获取角点
vector<Point2f> obj_corners(4);
obj_corners[0] = cvPoint(0,0); obj_corners[1] = cvPoint( srcImage1.cols, 0 );
obj_corners[2] = cvPoint( srcImage1.cols, srcImage1.rows ); obj_corners[3] = cvPoint( 0, srcImage1.rows );
vector<Point2f> scene_corners(4);
//进行透视变换
perspectiveTransform( obj_corners, scene_corners, H);
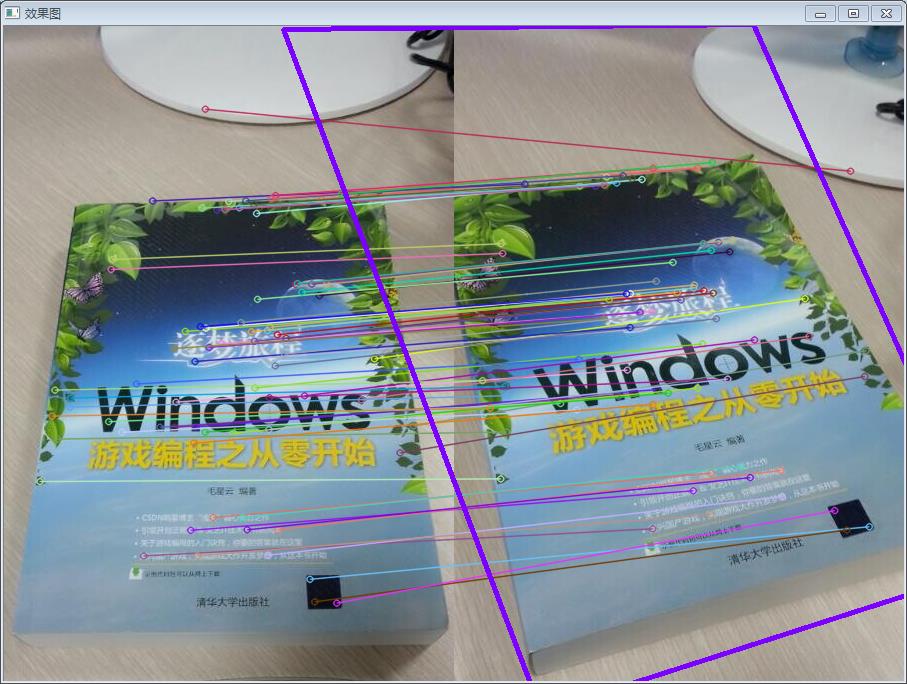
//绘制出角点之间的直线
line( img_matches, scene_corners[0] + Point2f( static_cast<float>(srcImage1.cols), 0), scene_corners[1] + Point2f( static_cast<float>(srcImage1.cols), 0), Scalar(255, 0, 123), 4 );
line( img_matches, scene_corners[1] + Point2f( static_cast<float>(srcImage1.cols), 0), scene_corners[2] + Point2f( static_cast<float>(srcImage1.cols), 0), Scalar( 255, 0, 123), 4 );
line( img_matches, scene_corners[2] + Point2f( static_cast<float>(srcImage1.cols), 0), scene_corners[3] + Point2f( static_cast<float>(srcImage1.cols), 0), Scalar( 255, 0, 123), 4 );
line( img_matches, scene_corners[3] + Point2f( static_cast<float>(srcImage1.cols), 0), scene_corners[0] + Point2f( static_cast<float>(srcImage1.cols), 0), Scalar( 255, 0, 123), 4 );
//显示最终结果
imshow( "效果图", img_matches );
waitKey(0);
return 0;
}


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









