






 本文介绍如何使用OpenCV中的卡尔曼滤波器实现对视频中行人的精确跟踪。通过构建卡尔曼滤波器并对行人移动进行预测与校正,实现连续稳定的跟踪效果。
本文介绍如何使用OpenCV中的卡尔曼滤波器实现对视频中行人的精确跟踪。通过构建卡尔曼滤波器并对行人移动进行预测与校正,实现连续稳定的跟踪效果。
卡尔曼滤波器的小例子
卡尔曼滤波器由Rudolf Kalman在20世纪50年代末提出的算法,在导航系统上得到了广泛的应用,据说在阿波罗登月的过程中,就使用了这种算法。

对卡尔曼滤波原理的理解可见:如何通俗并尽可能详细解释卡尔曼滤波?
本文不介绍卡尔曼滤波的原理,如果你想深入了解它的原理,可以参考这篇文章。本文仅介绍如何利用OpenCV中的卡尔曼滤波器,实现目标跟踪。
————————————————
利用卡尔曼滤波器监控行人
本节用到的视频来自于OpenCV的源码中,OpenCV可从官网上下载。安装后,在”D:\Program
Files\OpenCV\OpenCV-310\opencv\sources\samples\data\768x576.avi”下。
该视频的截图如下:
注:源码来自《OpenCV3计算机视觉》一书,GitHub地址https://github.com/techfort/pycv
在此基础上,稍作修改
import cv2
import numpy as np
def center(points):
"""计算矩阵的质心"""
x = (points[0][0] + points[1][0] + points[2][0] + points[3][0]) / 4
y = (points[0][1] + points[1][1] + points[2][1] + points[3][1]) / 4
return np.array([np.float32(x), np.float32(y)], np.float32)
class Pedestrian:
"""行人类
每个行人都有一个专属于他的卡尔曼滤波器,用于跟踪他的行踪
"""
def __init__(self, id, frame, track_window):
# 构建感兴趣区域ROI
self.id = int(id)
x, y, w, h = track_window
self.track_window = track_window
# 转换成HSV颜色空间,可以更好地专注于颜色
self.roi = cv2.cvtColor(frame[y:y + h, x:x + w], cv2.COLOR_BGR2HSV)
# 图像彩色直方图 16列直方图,每列直方图以0为左边界,18为右边界
roi_hist = cv2.calcHist([self.roi], [0], None, [16], [0, 180])
# 直方图归一化到0~255范围内
self.roi_hist = cv2.normalize(roi_hist, roi_hist, 0, 255, cv2.NORM_MINMAX)
# 构建卡尔曼滤波器
self.kalman = cv2.KalmanFilter(4, 2)
self.kalman.measurementMatrix = np.array([[1, 0, 0, 0], [0, 1, 0, 0]], np.float32)
self.kalman.transitionMatrix = np.array([[1, 0, 1, 0], [0, 1, 0, 1], [0, 0, 1, 0], [0, 0, 0, 1]], np.float32)
self.kalman.processNoiseCov = np.array([[1, 0, 0, 0], [0, 1, 0, 0], [0, 0, 1, 0], [0, 0, 0, 1]],
np.float32) * 0.03
self.measurement = np.array((2, 1), np.float32)
self.prediction = np.zeros((2, 1), np.float32)
self.term_crit = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 1)
self.center = None
self.update(frame)
# 更新 行人行踪 的方法
def update(self, frame):
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
back_project = cv2.calcBackProject([hsv], [0], self.roi_hist, [0, 180], 1)
# 使用CamShift跟踪行人的行踪
ret, self.track_window = cv2.CamShift(back_project, self.track_window, self.term_crit)
pts = cv2.boxPoints(ret)
pts = np.int0(pts)
self.center = center(pts)
cv2.polylines(frame, [pts], True, 255, 1)
# 根据行人的的实际位置 矫正卡尔曼滤波器
self.kalman.correct(self.center)
prediction = self.kalman.predict()
cv2.circle(frame, (int(prediction[0]), int(prediction[1])), 4, (255, 0, 0), -1)
# 读取视频
camera = cv2.VideoCapture("768x576.avi")
history = 20
# 用BackgroundSubtractorKNN构建背景模型
bs = cv2.createBackgroundSubtractorKNN()
cv2.namedWindow("surveillance")
pedestrians = {}
firstFrame = True
frames = 0
fourcc = cv2.VideoWriter_fourcc(*'XVID')
out = cv2.VideoWriter('output.avi', fourcc, 20.0, (640, 480))
while True:
grabbed, frame = camera.read()
fgmask = bs.apply(frame)
# 前20帧都没有被处理,只是被传递到BackgroundSubtractorKNN分割器
if frames < history:
frames += 1
continue
# 阈值化
th = cv2.threshold(fgmask.copy(), 127, 255, cv2.THRESH_BINARY)[1]
# 通过对前景掩模进行膨胀和腐蚀处理,相当于进行闭运算
# 开运算:先腐蚀再膨胀
# 闭运算:先膨胀再腐蚀
th = cv2.erode(th, cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (3, 3)), iterations=2)
dilated = cv2.dilate(th, cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (8, 3)), iterations=2)
# 轮廓提取
image, contours, hier = cv2.findContours(dilated, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
counter = 0
for c in contours:
# 对每一个轮廓,如果面积大于阈值500
if cv2.contourArea(c) > 500:
# 绘制外包矩形
(x, y, w, h) = cv2.boundingRect(c)
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 1)
# 仅仅对第一帧中出现的行人实例化
if firstFrame is True:
pedestrians[counter] = Pedestrian(counter, frame, (x, y, w, h))
counter += 1
for i, p in pedestrians.items():
p.update(frame) # 更新行人行踪
firstFrame = False
frames += 1
cv2.imshow("surveillance", frame)
out.write(frame)
if cv2.waitKey(100) & 0xff == ord('q'):
break
out.release()
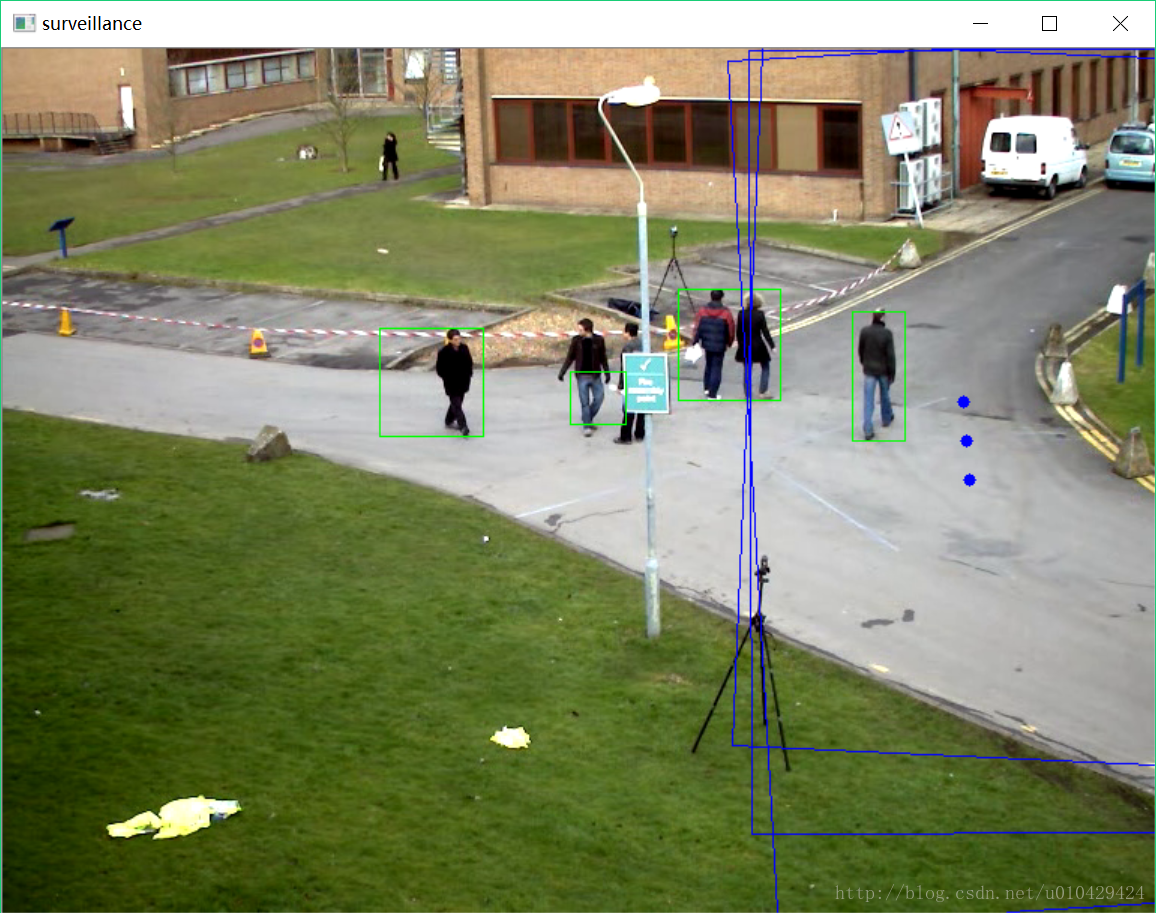
camera.release()程序的运行效果如下:

今天就自学到这里,拜拜~


















 1589
1589

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









