




 本文介绍如何利用Canny算法在灰度图像上进行边缘检测,并通过代码示例展示了如何实现这一过程。
本文介绍如何利用Canny算法在灰度图像上进行边缘检测,并通过代码示例展示了如何实现这一过程。
从一个灰度图像得到二值图像的函数有:cvThreshold,cvAdaptiveThreshold和cvCanny。
采用 Canny 算法做边缘检测
void cvCanny( const CvArr* image, CvArr* edges, double threshold1,
double threshold2, int aperture_size=3 );
-
image
- 单通道输入图像. edges
- 单通道存储边缘的输出图像 threshold1
- 第一个阈值 threshold2
- 第二个阈值 aperture_size
- Sobel 算子内核大小 (见 cvSobel).
函数 cvCanny 采用 CANNY 算法发现输入图像的边缘而且在输出图像中标识这些边缘。threshold1和threshold2 当中的小阈值用来控制边缘连接,大的阈值用来控制强边缘的初始分割。
- 注意事项:cvCanny只接受单通道图像作为输入。
- 外部链接:经典的canny自调整阈值算法的一个opencv的实现见在OpenCV中自适应确定canny算法的分割门限
#include "StdAfx.h"
#include "cv.h"
#include "cxcore.h"
#include "highgui.h"
int main( int argc, char** argv )
{
//声明IplImage指针
IplImage* img = NULL;
IplImage* cannyImg = NULL;
char *filename;
filename="f:\\3.jpg";
img=cvLoadImage(filename,1);
//载入图像,强制转化为Gray
if((img = cvLoadImage(filename, 0)) != 0 )
{
//为canny边缘图像申请空间
cannyImg = cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,1);
//canny边缘检测
cvCanny(img, cannyImg, 50, 150, 3);
//创建窗口
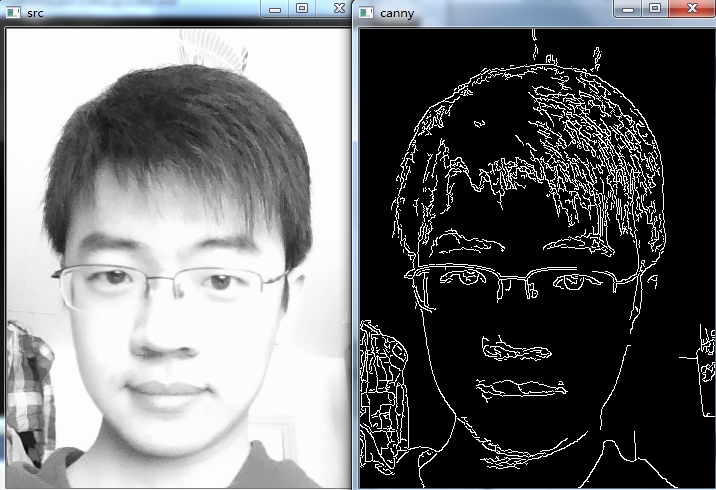
cvNamedWindow("src", 1);
cvNamedWindow("canny",1);
//显示图像
cvShowImage( "src", img );
cvShowImage( "canny", cannyImg );
cvWaitKey(0); //等待按键
//销毁窗口
cvDestroyWindow( "src" );
cvDestroyWindow( "canny" );
//释放图像
cvReleaseImage( &img );
cvReleaseImage( &cannyImg );
return 0;
}
return -1;
}

















 6020
6020

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









