







目的:在这里,我们做一个模拟智能手机在拍照时候追踪笔筒的一个模型
目录
追踪的对象如下图所示,是一个红色笔筒 --01.jpg

我们就在是视频流里实时的追中它,并且把它用矩形框标记出来。当然了,追踪一个人脸也是可以的,怕吓着各位,就不放我自己的脸了····(哈哈啊哈哈哈)
1.主程序段如下:
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
using namespace std;
using namespace cv;
/// 全局变量
Mat img; Mat templ; Mat result;
char* image_window = "Source Image";
char* result_window = "Result window";
int match_method;
int max_Trackbar = 5;
/// 函数声明
void MatchingMethod(int, void*);
int main(int argc, char** argv)
{
VideoCapture capture(0);
templ = imread("01.jpg"); //目标图像
while (1)
{
// 读图片
capture >> img;
// 创建图像显示窗口
namedWindow(image_window, CV_WINDOW_AUTOSIZE);
namedWindow(result_window, CV_WINDOW_AUTOSIZE);
// 创建混动条
char* trackbar_label = "Method: \n 0: SQDIFF \n 1: SQDIFF NORMED \n 2: TM CCORR \n 3: TM CCORR NORMED \n 4: TM COEFF \n 5: TM COEFF NORMED";
createTrackbar(trackbar_label, image_window, &match_method, max_Trackbar, MatchingMethod);
MatchingMethod(0, 0);
waitKey(30);
}
return 0;
}
2.模板匹配MatchingMethod的回调函数如下:
// 模板匹配
void MatchingMethod(int, void*)
{
// 用于显示结果
Mat img_display;
img.copyTo(img_display);//img_display=img
// 用于存储匹配结果的矩阵
int result_cols = img.cols - templ.cols + 1;
int result_rows = img.rows - templ.rows + 1;
result.create(result_cols, result_rows, CV_32FC1);
// 进行模板匹配
matchTemplate(img, templ, result, match_method);
// 归一化结果(方便显示结果)
normalize(result, result, 0, 1, NORM_MINMAX, -1, Mat());
// 找到最佳匹配位置
double minVal;
double maxVal;
Point minLoc;
Point maxLoc;
Point matchLoc;
minMaxLoc(result, &minVal, &maxVal, &minLoc, &maxLoc, Mat()); // 寻找result中的最大和最小值,以及它们所处的像素位置
// 使用SQDIFF和SQDIFF_NORMED方法时:值越小代表越相似
// 使用其他方法时:值越大代表越相似
if (match_method == CV_TM_SQDIFF || match_method == CV_TM_SQDIFF_NORMED)
{
matchLoc = minLoc;
}
else
{
matchLoc = maxLoc;
}
// 显示匹配结果
rectangle(img_display, matchLoc, Point(matchLoc.x + templ.cols, matchLoc.y + templ.rows), Scalar::all(0), 2, 8, 0);
rectangle(result, matchLoc, Point(matchLoc.x + templ.cols, matchLoc.y + templ.rows), Scalar::all(0), 2, 8, 0);
imshow(image_window, img_display);
imshow(result_window, result);
}
可看到下面我从视频中截的三张图

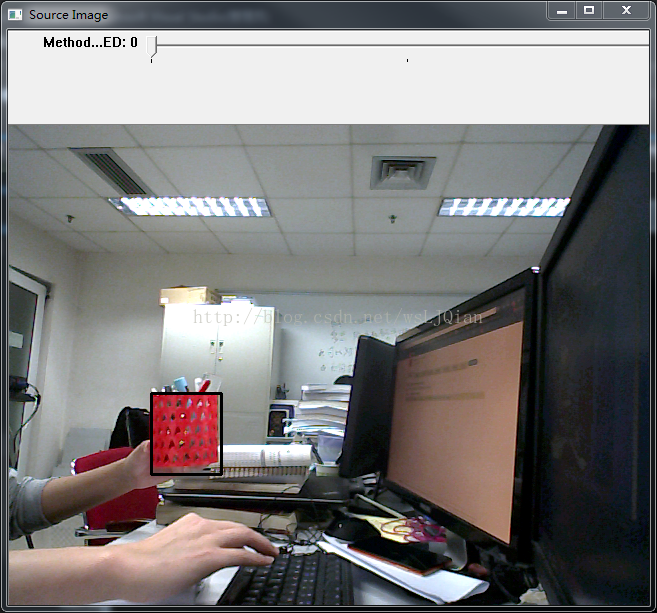

感兴趣的可以自己试验一下,程序段可以直接运行。视频图像就不上传了,相互学习
又兴趣的请关注微信公众号:小白算法
















 2347
2347











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











